一种无人机落地支架、系统和落地方法
本发明属于无人机精准作业,具体涉及一种无人机落地支架、系统和落地方法。
背景技术:
1、无人机具有广泛的应用,尤其是航空拍摄领域,可以搭载不同的成像设备,进行不同光谱的成像。但是,目前无人机起降地点只能在较为平整的区域,而对任意地方的目标进行微观作业有着重要意义,尤其是农业领域,培育新种、农药研发等领域均需要微观观测植物表型;某些特殊场景(例如山坡等凹凸不平的地区)下也需要对目标物进行微观拍摄和微观采集样本。
2、无人机在微观作业时的精度不高,主要是无人机的电机转动时机身抖动造成的。例如微观成像领域,目前的微观成像设备(体式显微镜等微观成像设备)对抖动非常敏感,因此无人机搭载微观成像设备时无法获取清晰的成像目标。同时,无人机旋翼转动造成的风力对无人机微观作业也造成一定干扰,在微观取样领域,风力的干扰(尤其是植物体采集样本)以及机身的抖动使采样设施无法精准获取目标。
3、因此,对于微观作业最好的方法是,将无人机悬停或者停留在所需要拍摄的位置后,通过支撑减少电机转动所带来的无人机的抖动影响,从而使得无人机能够进行精准作业,然而现有的无人机,由于起落支架的限制,并不能够悬停或者直接停留在任意形状的路面上,无法实现作业任务,地形条件限制了无人机的起降,进一步限制了无人机的微观作业。
技术实现思路
1、本发明为了解决上述问题,本发明提供了一种无人机落地支架、系统和落地方法,该支架和系统可在使得无人接具有在任意地面起降的能力,从而扩展无人机的落地范围,同时也可避免无人机进行微观作业时机身抖动和旋翼风力的干扰。
2、本发明所采用的技术方案是:一种无人机落地支架,包括活动支腿机构和张紧机构,所述活动支腿机构和张紧机构连接,所述活动支腿机构可相对于无人机伸出/缩回,所述活动支腿机构为柔性结构件;所述张紧机构用于在所述活动支腿机构伸出于所述无人机后,张紧活动支腿机构的伸出部分为刚性结构。
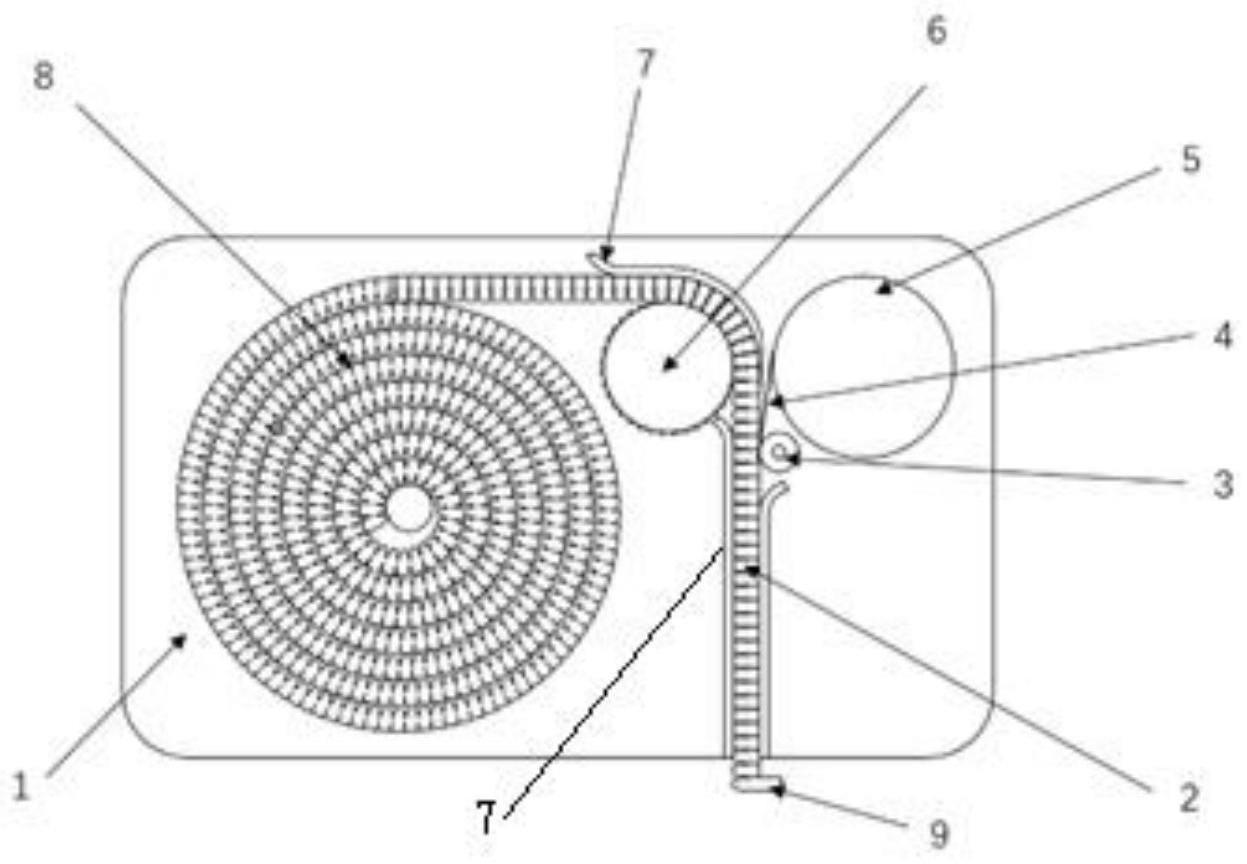
3、优选的,所述活动支腿机构包括卷曲部和支撑部,所述卷曲部柔性绕设于所述无人机内;所述支撑部与张紧机构连接,所述支撑部伸出于所述无人机并由张紧机构牵拉张紧构成刚性支撑,所述支撑部提供无人机支撑力。
4、优选的,所述活动支腿机构为单向弯曲链条,所述单向弯曲链条由若干连接块依次铰接构成,两两所述连接块之间可相对滑动,所述活动支腿机构通过转动机构带动伸出/缩回于无人机;所述活动支腿机构上支撑部的端部设置链脚,所述链脚与张紧机构连接。
5、优选的,所述转动机构包括链轮,所述链轮与第一电机连接,所述链轮与单向弯曲链条啮合适配;所述单向弯曲链条通过链条导轨伸出于无人机外部,所述链条导轨设置于无人机内,所述链条导轨的长度与无人机内部通过张紧机构张紧的单向弯曲链条部分的长度相当。
6、优选的,所述张紧机构包括线轮,所述线轮上设置有拉线,所述拉线的一端与线轮固定连接,所述拉线的另一端穿过链条导轨与链脚连接;所述线轮与第二电机连接,位于所述链条导轨的入口端、靠近线轮一侧设置压线轮,所述压线轮与拉线紧密贴合,所述压线轮将拉线压于与支撑部支撑受力相同的方向。
7、一种无人机落地系统,包括执行机构和控制机构;
8、所述执行机构为升降架,所述升降架内设置单向弯曲链条,所述单向弯曲链条由若干连接块依次铰接构成,两两所述连接块之间可相对滑动,所述单向弯曲链条通过转动机构带动伸出/缩回于无人机;所述单向弯曲链条包括卷曲部和支撑部,所述卷曲部柔性绕设于所述无人机内,所述上支撑部的端部设置链脚,所述链脚与张紧机构连接;所述支撑部伸出于所述无人机并由张紧机构牵拉张紧构成刚性支撑,所述支撑部提供无人机支撑力;所述执行机构设置的数量不少于无人机落地后保持稳定的最少点位;
9、所述控制机构包括倾角测量传感器、角速度传感器、压力传感器、测距传感器和控制器,所述倾角测量传感器、测距传感器设置在无人机内部,所述压力传感器、测距传感器设置在链脚上;所述倾角测量传感器、测距传感器、压力传感器、测距传感器和控制器连接,所述控制器与无人机上的旋翼控制电机、执行机构连接。
10、优选的,所述转动机构包括链轮,所述链轮与第一电机连接,所述链轮与单向弯曲链条啮合适配;所述单向弯曲链条通过链条导轨伸出于无人机外部,所述链条导轨设置于无人机内,所述链条导轨的长度与无人机内部通过张紧机构张紧的单向弯曲链条部分的长度相当。
11、优选的,所述张紧机构包括线轮,所述线轮上设置有拉线,所述拉线的一端与线轮固定连接,所述拉线的另一端穿过链条导轨与链脚连接;所述线轮与第二电机连接,位于所述链条导轨的入口端、靠近线轮一侧设置压线轮,所述压线轮与拉线紧密贴合,所述压线轮将拉线压于与支撑部支撑受力相同的方向。
12、一种无人机落地方法,包括以下步骤:
13、s1:落地位置确定:无人机通过机身内的位姿检测系统评估降落过程中,所落地位置的地面起伏数据,并评估无人机机身上的落地支架分别与落地位置之间的距离,确定距离后,根据所确定的距离下放落地支架;所述落地支架为升降架,所述升降架内设置单向弯曲链条,所述单向弯曲链条由若干连接块依次铰接构成,两两所述连接块之间可相对滑动,所述单向弯曲链条通过转动机构带动伸出/缩回于无人机;所述单向弯曲链条包括卷曲部和支撑部,所述卷曲部柔性绕设于所述无人机内,所述上支撑部的端部设置链脚,所述链脚与张紧机构连接;所述支撑部伸出于所述无人机并由张紧机构牵拉张紧构成刚性支撑,所述支撑部提供无人机支撑力;
14、s2:下放支撑链脚:链脚下放,并且在下放的过程中,通过机身内的位姿检测系统不断评估与地面之间的距离,当链脚接触地面后,随着机身内的位姿检测系统内压力值的反馈确定链脚下放的最终长度;通过机身位姿检测系统检测机身的倾角与悬浮高度,实时调整旋翼的转速来调整悬浮力,维持旋翼悬浮力与链脚承受压力总和相对稳定,旋翼转速逐渐降低,维持无人机身姿水平降落;
15、s3:机身位姿调整:无人机平稳落地后,通过机身内的位姿检测系统评估机身倾角数据并反馈给无人机内部的控制器,若需机身保持水平,则中央处理器控制落地支架内的单向弯曲链条伸出/缩回,消除机身倾角;若需机身具有一定倾角进行作业,则控制无人机上不同位点上的落地支架根据需要的倾角伸出/缩回,使得无人机调整到需要作业时的所需倾角。
16、优选的,机身内的位姿检测系统包括倾角测量传感器、角速度传感器、压力传感器、测距传感器和控制器,所述倾角传感器、红外传感器、角速度传感器设置在无人机内部,所述压力传感器、测距传感器设置在链脚上;所述倾角传感器、红外传感器、角速度传感器、压力传感器、测距传感器和控制器连接,所述控制器与无人机上的旋翼控制电机、执行机构连接。
17、本发明具有以下有益效果:
18、1、本发明的落地支架采用柔性结构的单向弯曲链条,单向弯曲链条可以卷曲存储在无人机内部或者落地支架的壳体内,从而保证可以根据任意地形进行不同长度的伸缩;本发明的单向弯曲链条采用拉线绷紧,绷紧后形成刚性结构,从而对无人机进行支撑,本发明的单向弯曲链条可以根据需要进行柔性和刚性之间的转换,从而满足不同的使用需求;
19、2、本发明通过链脚处的压力传感器与测距传感器双重检测,确定无人机是否成功降落,当链脚接触复杂地形降落地,支撑链脚的接触点避开压力传感器检测范围时,压力传感器未曾检测到压力值失效,需要测距传感器验证,链脚继续下放,当链脚的测距传感器检测到链脚与降落地的距离不再变化且机身倾斜,判定无人机链脚成功着地;通过双重检测确保去人机的成功降落;
20、3、本发明的落地支架根据无人机能够保持平稳的最少落地点数确定,各个落地支架可以分别调整伸出长度,每个落地支架能够独立控制,从而可以根据不同的地形确定伸出长度,使得无人机能够平稳的降落在各种非水平地面,扩展无人机的作业范围。
- 还没有人留言评论。精彩留言会获得点赞!