一种含可变化骨节的仿生着陆腿式无人机及其控制方法
本发明涉及六旋翼无人机领域,尤其涉及一种含可变化骨节的多骨节仿生四足着陆腿式六旋翼无人机及其控制方法。
背景技术:
1、多旋翼无人机使用领域广阔,在军事及民用领域均较广泛,特别是由于其突出的小巧、方便易于操作的特点,其应用工作范围也越来越宽泛,但多旋翼无人机的使用条件受到自然环境条件的影响,在斜坡及凹凸不平的地面上起降时具有一定的局限性,对其任务的执行产生不利影响。
2、现阶段旋翼飞行器的起落架主要采取橇式起落架和支柱式起落架。且安装时主要采用固定安装在机身腹部的方式,结构相对固定,自由度低,虽然结构重量较轻,增加了续航能力,但却使得其针对复杂地形的适应力减弱,由于缺乏地形自适应的能力,在复杂地面进行起降时,往往需要操控人员根据经验和操控技术额外进行调控,大大增加起飞难度,当操作人员视线受阻无法得到多旋翼无人机的起降的地面信息时,甚至常会发生无人机无法降落或者侧翻损坏的事故。
3、为了解决地形自适应的问题,在现有的无人机设计方案中,能够自适应地形的无人机种类少,现有技术提供了如下方案:中国实用新型专利,公开号为:cn209274889u、申请日为:2018年11月7日、名为:一种植保无人飞机复杂地形自适应起落架一案中提出了一种采用四根独立伸缩的杆结构作为无人机起落架的地形自适应方案。这样的结构,就使得每个支腿只能改变足端的落点高度,不能改变足端落点的平面位置,在横向上的自适应能力并不出色。
4、中国发明专利申请,公开号为:cn106043673a、申请日为:2016年8月12日、名为:一种可在任意地形降落的无人机一案中提出了一种通过支撑杆与机体连接的固定环作为无人机的起落架。该发明的固定环与地面为线接触,能够适应的地形种类极其有限。对于地面不平整度较大,地面斜坡斜率较大的地形都不能适应,同时也不能保证在无人机着陆时使无人机处于水平姿态,不利于无人机的起降。而本发明中提出的平行四边形活动关节组解决了机械腿竖直方向上的移动问题,使得机身处于水平状态的能力更加稳定。
5、中国发明专利申请,公开号为cn109204785a、申请日为:2018年9月7日、名为:一种全地形自适应性无人机垂直起降起落架一案中提出的全地形自适应起落架,其每个承载柱只能在导轨上移动,可移动范围有限,可以选择的落点因而也有限。本发明中提出的多骨节结构组成的平行四边形活动关节组可以做到竖直方向上的较大范围移动,同时由于三角形活动关节组的存在,使得重量和下沉速度增大时的缓冲减震问题得到解决。
6、因此,如何对无人机进行优化,使其可以满足复杂地形自适应起降落,就成为了本领域技术人员亟待解决的技术问题。
技术实现思路
1、本发明针对以上问题,提出了一种含可变化骨节的仿生着陆腿式无人机及其控制方法,能够操纵仿生着陆腿大范围变形以满足复杂地形自适应起降落,拓展了无人机的环境适应性。
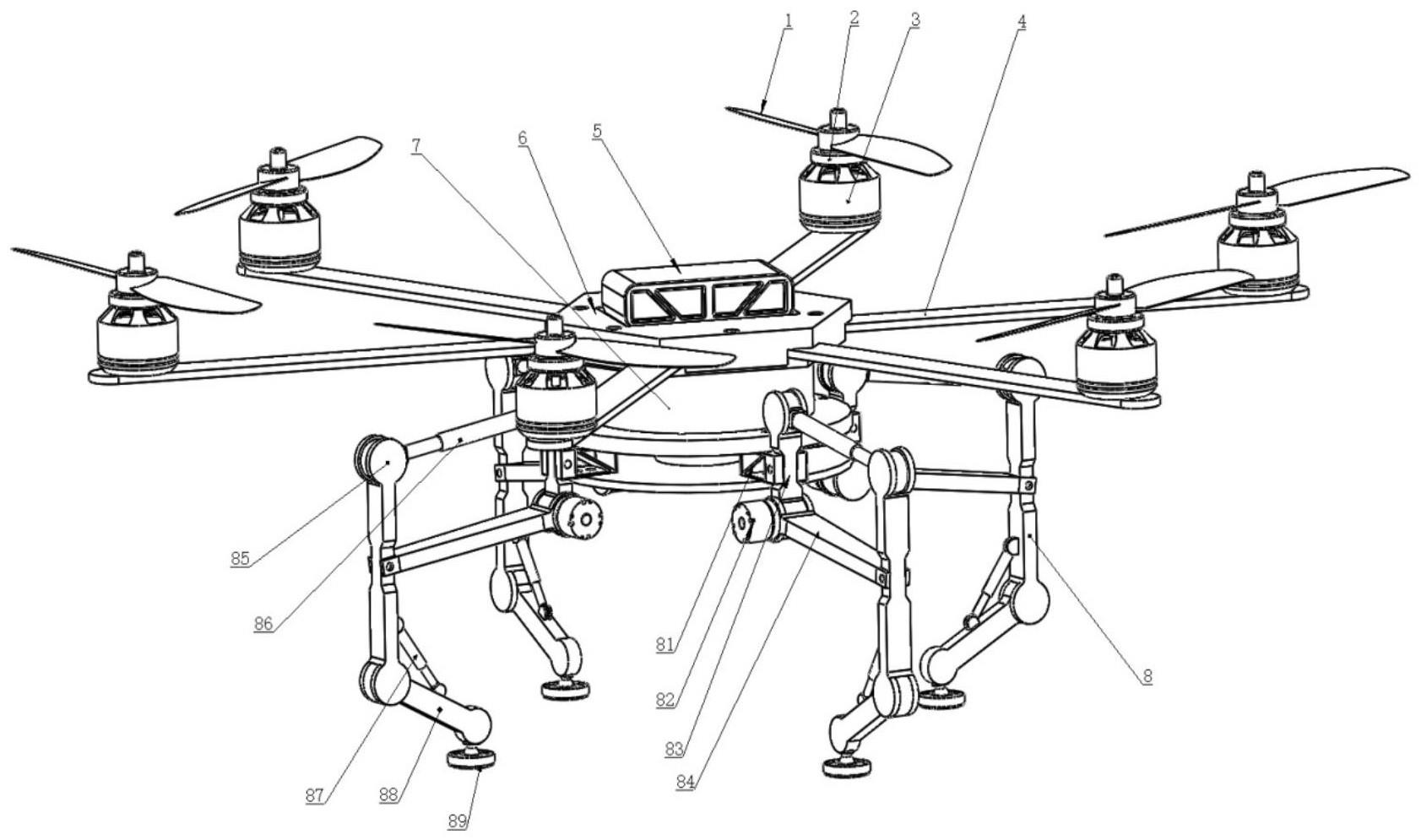
2、本发明的技术方案为:所述无人机具有安装平台7,在安装平台7上连接有四个沿安装平台7周向均匀分布的仿生着陆腿8,所述仿生着陆腿8包括腿安装件81、电机82、第一常规骨节83、第二常规骨节84、第三常规骨节85、第一缓冲骨节86、第二缓冲骨节87、第四常规骨节88以及足垫89;
3、所述第一常规骨节83的中部通过腿安装件81固定连接在安装平台7上;所述第二常规骨节84的两端分别铰接第一常规骨节83和第三常规骨节85,所述第一缓冲骨节86的两端也分别铰接第一常规骨节83和第三常规骨节85,所述第四常规骨节88的一端铰接第三常规骨节85,另一端则与足垫89相连接,所述第二缓冲骨节87两端则分别铰接第三常规骨节85和第四常规骨节88;
4、所述电机82设置在第一常规骨节83和第二常规骨节84的转动连接关节处,通过电机82带动第二常规骨节84往复摆动。
5、进一步的,所述第二常规骨节84与第一缓冲骨节86平行。从而使得第一常规骨节83、第二常规骨节84、第三常规骨节85、第一缓冲骨节86的安装形态为平行四边形,构成平行四边形式活动关节组一。
6、进一步的,所述第四常规骨节88的顶端铰接第三常规骨节85,所述第二缓冲骨节87两端分别铰接在第三常规骨节85的下部和第四常规骨节88的中部。从而使得第三常规骨节85、第四常规骨节88、第二缓冲骨节86的安装形态为三角形,构成三角形式活动关节组二。
7、进一步的,所述第一常规骨节83和第二常规骨节84之间设有与第一常规骨节83固定相连的铰接轴,所述电机82的壳体固定连接在第二常规骨节84上,并且电机82的输出轴与铰接轴固定相连。
8、进一步的,所述第四常规骨节88的底端通过球铰与足垫89相连接。足垫为平底形,采用橡胶材料制作在保证仿生着陆腿稳定的同时,又能为起降落提供额外的缓冲减震功能。
9、进一步的,在所述安装平台7上还固定设有控制盒5,所述控制盒5包括电机控制器和马达控制器,二者均采用 pid控制算法。
10、为了便于飞行器姿态调整,设计基于pid控制方法的姿态回路控制器,该控制器的输入为期望姿态角与反馈姿态角的差值;通过输出三个虚拟控制量实现对飞行器姿态的控制;
11、
12、其中为横滚角控制量,为俯仰角控制量,为偏航角控制量;为比例环节系数,为积分环节系数,为微分环节系数。为姿态角反馈误差,具体表示如下:
13、
14、因此飞行器可根据控制器输出的虚拟控制量来计算期望力矩及升力,进而计算期望电机转速,变换关系如下:
15、
16、其中为旋翼支臂上六个马达的期望转速,为滚转力矩的期望力矩,为俯仰力矩的期望力矩,为偏航力矩的期望力矩,为期望升力,为旋翼轴距、为桨叶升力系数、为桨叶力矩系数。
17、本发明的设计特点在于集成了机身和起落架,由仿生着陆足进行复杂地形的起降,提高了无人机对复杂地形着陆的适应能力,拓宽无人机领域的应用前景。具有以下有益效果:
18、本发明采用仿生着陆腿的四足结构作为无人机的起落架,每个起落架具有两个自由度,且拥有两个可变的缓冲骨节,在保证足端活动空间更大的前提下,保证了更高的稳定性和实用性。起落架配合pid控制器更好的适配复杂地形的起降。四足的结构更加稳定,即使在一些坡度较大、凹凸度较大的地区也可以平稳着陆。
19、本发明采用电机驱动实时调整腿部姿态,仿生着陆腿具有两个活动关节组,具有多姿态变形功能,可以完成较高高度变化要求的自适应起降,拓展了无人机的功能范围。
20、本发明使用缓冲构件作为缓冲骨节,并与常规骨节构成平行四边形,提高了仿生着陆腿变形能力的同时提高了减震、抗冲击能力,对地形环境自适应无人机起降速度范围的要求进一步优化。
技术特征:
1.一种含可变化骨节的仿生着陆腿式无人机,其特征在于,所述无人机具有安装平台(7),在安装平台(7)上连接有四个仿生着陆腿(8),所述仿生着陆腿(8)包括腿安装件(81)、电机(82)、第一常规骨节(83)、第二常规骨节(84)、第三常规骨节(85)、第一缓冲骨节(86)、第二缓冲骨节(87)、第四常规骨节(88)以及足垫(89);
2.根据权利要求1所述的一种含可变化骨节的仿生着陆腿式无人机,其特征在于,所述第二常规骨节(84)与第一缓冲骨节(86)平行。
3.根据权利要求1所述的一种含可变化骨节的仿生着陆腿式无人机,其特征在于,所述第四常规骨节(88)的顶端铰接第三常规骨节(85),所述第二缓冲骨节(87)两端分别铰接在第三常规骨节(85)的下部和第四常规骨节(88)的中部。
4.根据权利要求1所述的一种含可变化骨节的仿生着陆腿式无人机,其特征在于,所述第一常规骨节(83)和第二常规骨节(84)之间设有与第一常规骨节(83)固定相连的铰接轴,所述电机(82)的壳体固定连接在第二常规骨节(84)上,并且电机(82)的输出轴与铰接轴固定相连。
5.根据权利要求1所述的一种含可变化骨节的仿生着陆腿式无人机,其特征在于,所述第四常规骨节(88)的底端通过球铰与足垫(89)相连接。
6.根据权利要求1所述的一种含可变化骨节的仿生着陆腿式无人机,其特征在于,在所述安装平台(7)上还固定设有控制盒(5),所述控制盒(5)包括电机控制器和马达控制器,二者均采用 pid控制算法。
7.一种权利要求6所述的含可变化骨节的仿生着陆腿式无人机的控制方法,其特征在于,为了便于飞行器姿态调整,设计基于pid控制方法的姿态回路控制器,该控制器的输入为期望姿态角与反馈姿态角的差值;通过输出三个虚拟控制量实现对飞行器姿态的控制;
技术总结
本发明公开了一种含可变化骨节的仿生着陆腿式无人机及其控制方法,涉及六旋翼无人机领域,能够在复杂地形下进行稳定的起降。所述无人机具有安装平台,在安装平台上连接有四个仿生着陆腿,所述仿生着陆腿包括腿安装件、电机、第一常规骨节、第二常规骨节、第三常规骨节、第一缓冲骨节、第二缓冲骨节、第四常规骨节以及足垫。本发明的设计特点在于集成了机身和起落架,由仿生着陆足进行复杂地形的起降,提高了无人机对复杂地形着陆的适应能力,拓宽无人机领域的应用前景。
技术研发人员:魏小辉,孙文宇,周乐,梁伟华,尹乔之,孙浩
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!