一种超静音飞行的固态等离子推进无人机
本发明涉及等离子推进无人机,特别是涉及一种超静音飞行的固态等离子推进无人机。
背景技术:
1、随着高新技术的快速发展,无人机的研制取得了飞速发展,在军事和民用领域取得了广泛的应用。军用无人机作为现代空中军事力量中的一员,具有无人员伤亡、使用限制少、隐蔽性好和效费比高等特点,在现代战争中的地位和作用日渐突出在近期的历次局部战争中。无人机在现代战争中有极其重要的作用,可用于战场侦察、诱饵模拟、电子对抗、对地攻击和空中拦截等。无人机在民用领域也有广阔的前景,可用于边境巡逻、核辐射探测、航空摄影、航空探矿、灾情监视、交通巡逻和治安监控等。传统无人机大多采用螺旋桨、舵机等活动执行机构,其机械疲劳大,使用寿命短,并且在工作时容易造成噪声污染和燃烧排放物污染,限制了其在低空作业领域的进一步发展前景。
2、因此,亟需一种能够提高使用寿命且超静音飞行的无污染排放无人机。
技术实现思路
1、本发明的目的是提供一种超静音飞行的固态等离子推进无人机,不仅能够降低机械疲劳从而提高使用寿命,而且还能够降低噪声污染和燃烧排放物污染,从而实现超静音飞行。
2、为实现上述目的,本发明提供了如下方案:
3、本发明提供的一种超静音飞行的固态等离子推进无人机,包括:
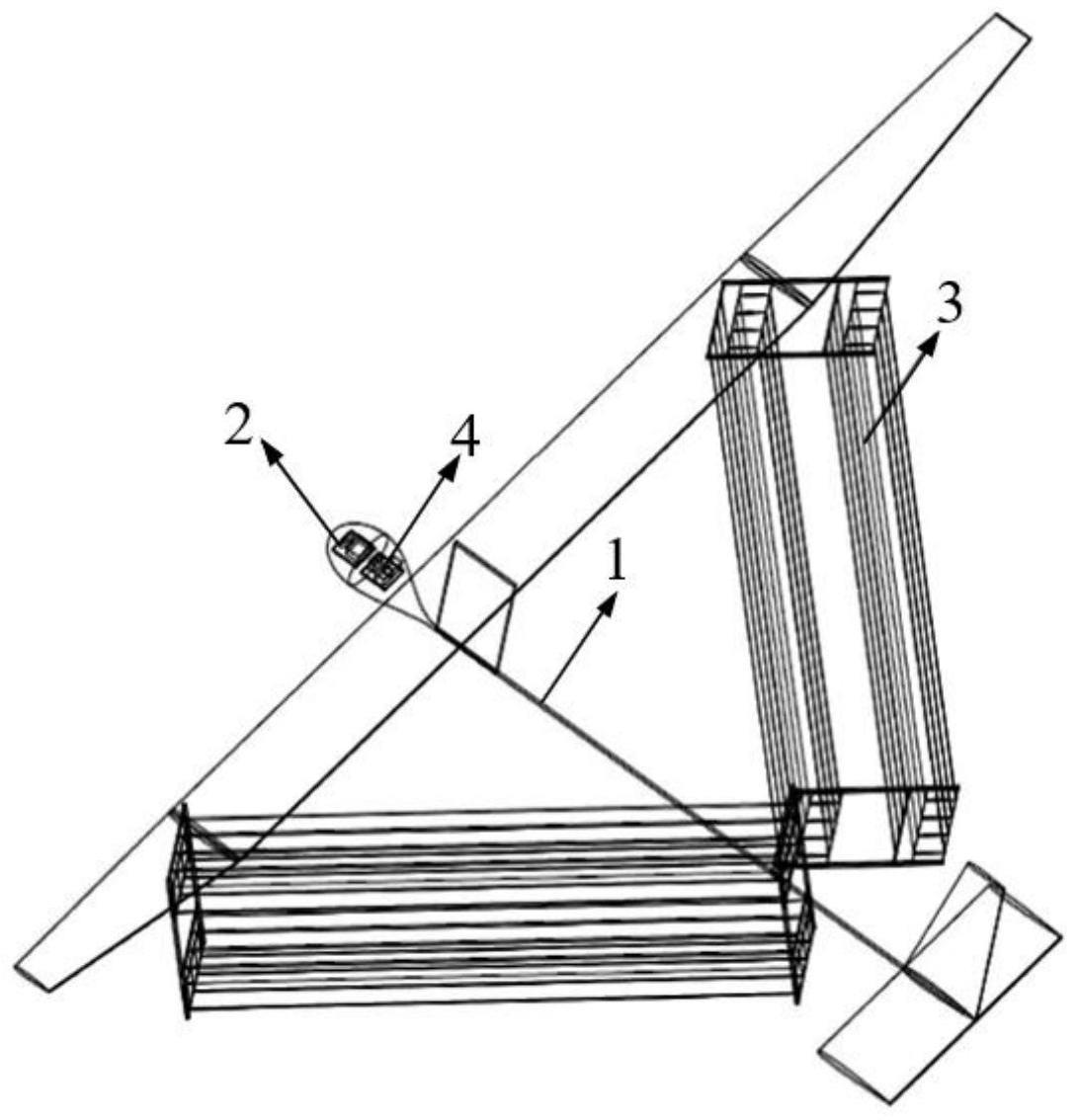
4、无人机本体,所述无人机本体包括:机身、设备安装舱、机翼、尾翼;所述设备安装舱设置于所述机身的头部,所述机翼设置在所述机身的两侧,所述尾翼设置于所述机身的尾部;
5、飞控系统,设置于所述设备安装舱内部,用于接收遥控器的飞行控制指令,并产生飞行控制信号;
6、等离子推进系统,设置于所述机身和所述机翼上,用于产生飞行推力;
7、电气系统,设置于所述设备安装舱内部且分别与所述等离子推进系统和所述飞控系统电连接,用于对所述等离子推进系统和所述飞控系统进行供电;以及用于接收所述飞行控制信号,并根据所述飞行控制信号对所述无人机本体进行飞行位姿控制。
8、可选地,所述等离子推进系统包括第一等离子推进器和第二等离子推进器;所述第一等离子推进器和第二等离子推进器的一端相连设置于所述机身上,且均与所述机身的纵切面之间的夹角为45°;所述第一等离子推进器和第二等离子推进器的另一端分别设置于所述机翼的两侧下方且均与所述电气系统电连接。
9、可选地,所述第一等离子推进器和第二等离子推进器均包括多组呈左右排列的电极阵列;每组所述电极阵列包括多对呈上下排列的电机单元,每对所述电机单元包括发射电极和收集电极;所述发射电极与所述电气系统的正极相连;所述收集电极与所述电气系统的负极相连。
10、可选地,所述等离子推进系统包括第一分区、第二分区、第三分区和第四分区;所述第一分区为所述第一等离子推进器的上半部分的多对电极阵列;所述第二分区为所述第二等离子推进器的上半部分的多对电极阵列;所述第三分区为所述第一等离子推进器的下半部分的多对电极阵列;所述第四分区为所述第二等离子推进器的下半部分的多对电极阵列。
11、可选地,每组所述电极阵列的数量为2组,每组所述电极单元的数量为4对。
12、可选地,所述等离子推进系统还包括:支撑结构件;
13、所述等离子推进系统通过所述支撑结构件设置于所述机身和所述机翼上。
14、可选地,所述支撑结构件包括:第一支撑结构件、第二支撑结构件和第三支撑结构件;
15、所述第一等离子推进器和所述第二等离子推进器相连的一端通过所述第三支撑结构件设置于所述机身上方,所述第二等离子推进器没有相连的一端通过所述第一支撑结构件设置于所述机翼一侧的下方;所述第二等离子推进器没有相连的一端通过所述第三支撑结构件设置于所述机翼另一侧的下方。
16、可选地,所述飞控系统包括:
17、遥控接收机,用于接收遥控器的飞行控制指令;
18、控制器,分别与所述遥控接收机和所述电气系统电连接,用于根据所述飞行控制指令产生飞行控制信号,并将所述飞行控制信号传输至所述电气系统。
19、可选地,所述电气系统包括:
20、锂电池组,用于产生低压直流电;
21、高压直流电源,分别与所述锂电池组和所述等离子推进系统电连接,用于将所述低压直流电转换为高压直流电,并将所述高压直流电传输给所述等离子推进系统,以对所述等离子推进系统进行供电;
22、低压直流电源,分别与所述锂电池组和所述飞控系统电连接,用于将低压直流电传输给所述飞控系统,以对所述飞控系统进行供电;
23、电压控制电路,分别与所述锂电池组、所述高压直流电源和所述飞控系统连接,用于接收所述飞行控制信号,并根据所述飞行控制信号控制向所述等离子推进系统的每个分区的供电电压进行调整,以对所述无人机本体进行飞行位姿控制。
24、根据本发明提供的具体实施例,本发明公开了以下技术效果:
25、本发明采用基于高压直流电源的等离子推进系统作为推力以及控制力矩的输出装置,没有废物排出,对环境友好,并且相较于使用喷气以及螺旋桨的传统无人机,它在飞行过程中产生的噪声更小,可以实现接近静音的飞行,更适合进行低空作业;与此同时,本发明采用无活动部件的整体固态结构,在控制等离子推进无人机进行位置及姿态变化时,等离子推进系统在电气系统的高压供电下产生推力,并在电控系统的控制下,通过改变等离子推进器的电压分布从而改变推力分布,进而产生操纵力矩,而不依靠活动舵面等活动执行机构,其机械疲劳更小,可以拥有更长的使用寿命。
技术特征:
1.一种超静音飞行的固态等离子推进无人机,其特征在于,包括:
2.根据权利要求1所述的超静音飞行的固态等离子推进无人机,其特征在于,所述等离子推进系统(3)包括第一等离子推进器和第二等离子推进器;所述第一等离子推进器和第二等离子推进器的一端相连设置于所述机身(11)上,且均与所述机身(11)的纵切面之间的夹角为45°;所述第一等离子推进器和第二等离子推进器的另一端分别设置于所述机翼(13)的两侧下方且均与所述电气系统(4)电连接。
3.根据权利要求2所述的超静音飞行的固态等离子推进无人机,其特征在于,所述第一等离子推进器和第二等离子推进器均包括多组呈左右排列的电极阵列;每组所述电极阵列包括多对呈上下排列的电机单元,每对所述电机单元包括发射电极(31)和收集电极(32);所述发射电极(31)与所述电气系统(4)的正极相连;所述收集电极(32)与所述电气系统(4)的负极相连。
4.根据权利要求3所述的超静音飞行的固态等离子推进无人机,其特征在于,所述等离子推进系统(3)包括第一分区、第二分区、第三分区和第四分区;所述第一分区为所述第一等离子推进器的上半部分的多对电极阵列;所述第二分区为所述第二等离子推进器的上半部分的多对电极阵列;所述第三分区为所述第一等离子推进器的下半部分的多对电极阵列;所述第四分区为所述第二等离子推进器的下半部分的多对电极阵列。
5.根据权利要求3所述的超静音飞行的固态等离子推进无人机,其特征在于,每组所述电极阵列的数量为2组,每组所述电极单元的数量为4对。
6.根据权利要求2所述的超静音飞行的固态等离子推进无人机,其特征在于,所述等离子推进系统(3)还包括:支撑结构件(33);
7.根据权利要求6所述的超静音飞行的固态等离子推进无人机,其特征在于,所述支撑结构件(33)包括:第一支撑结构件、第二支撑结构件和第三支撑结构件;
8.根据权利要求4所述的超静音飞行的固态等离子推进无人机,其特征在于,所述飞控系统(2)包括:
9.根据权利要求8所述的超静音飞行的固态等离子推进无人机,其特征在于,所述电气系统(4)包括:
技术总结
本发明公开一种超静音飞行的固态等离子推进无人机,包括:无人机本体、飞控系统、电气系统和等离子推进系统;其中,无人机本体包括机身、设备安装舱、机翼和尾翼;设备安装舱设置于机身的头部,机翼设置在机身的两侧,尾翼设置于机身的尾部;飞控系统用于接收遥控器的飞行控制指令并产生飞行控制信号;等离子推进系统用于产生飞行推力;电气系统用于对等离子推进系统和飞控系统进行供电,以及用于接收飞行控制信号,并根据飞行控制信号对无人机本体进行飞行位姿控制。本发明不仅能够降低机械疲劳从而提高使用寿命,而且还能够降低噪声污染和燃烧排放物污染,从而实现超静音飞行。
技术研发人员:林桐,夏泽纬,齐乃明,徐晔,英毓龙,霍明英,穆荣军,王少海,莫丽东,于泽
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!