一种高载荷无人机及无人机载物方法与流程
本发明涉及无人机领域,更具体的说是一种高载荷无人机及无人机载物方法。
背景技术:
1、无人机作为新兴的科技产品,在多领域得以实现高效运用,针对我国较大城市及特大城市的交通布局,在物流转储、投放以及送餐等包裹转运等领域,缺少以空中线路为基础的新型转运设备。例如:cn213892927u,一种无人机载货结构,本实用新型公开了一种无人机载货结构,包括无人机,所述无人机的底部固定连接有传动箱,所述传动箱的内部固定连接有固定柱,所述固定柱的顶部套设有第一滑块,所述第一滑块与固定柱配合使用,所述固定柱的底部套设有第二滑块。本实用新型通过设置无人机、传动箱、固定柱、第一滑块、第二滑块、第一传动杆、夹杆、旋转把手、第一螺杆、第一移动块、第二螺杆、第二移动块、卡钩、卡块、开口、第一轴承、第二轴承、运输箱、钩块、卡槽和活动槽的配合使用,具备固定牢固的优点,解决了现有载货无人机在运输货物时由于载货架固定不牢固,导致在运输中货物从载货架上掉落,会对我们的货物造成很大的损害的问题。该实用新型吊装物体单一,且只能在常规天气作业,其吊装运输机构为本领域技术人员能够根据实际情况做出调整的常规机构。例如:cn213892927u,一种基于物联网的载货无人机,本实用新型公开了一种无人机载货结构,包括无人机,所述无人机的底部固定连接有传动箱,所述传动箱的内部固定连接有固定柱,所述固定柱的顶部套设有第一滑块,所述第一滑块与固定柱配合使用,所述固定柱的底部套设有第二滑块。本实用新型通过设置无人机、传动箱、固定柱、第一滑块、第二滑块、第一传动杆、夹杆、旋转把手、第一螺杆、第一移动块、第二螺杆、第二移动块、卡钩、卡块、开口、第一轴承、第二轴承、运输箱、钩块、卡槽和活动槽的配合使用,具备固定牢固的优点,解决了现有载货无人机在运输货物时由于载货架固定不牢固,导致在运输中货物从载货架上掉落,会对我们的货物造成很大的损害的问题。该实用新型吊装物体单一,且只能在常规天气作业,其吊装运输机构为本领域技术人员能够根据实际情况做出调整的常规机构。
技术实现思路
1、本发明的目的是提供一种高载荷无人机及无人机载物方法,通过尾部滑轮组设计快速装入货物,利用双旋翼驱动特点结合滑轮组给予防撞防卡保护,通过单输入双输出的功能实现驱动组对于流水线、抓取、限位等等的单一控速。
2、本发明的目的通过以下技术方案来实现:
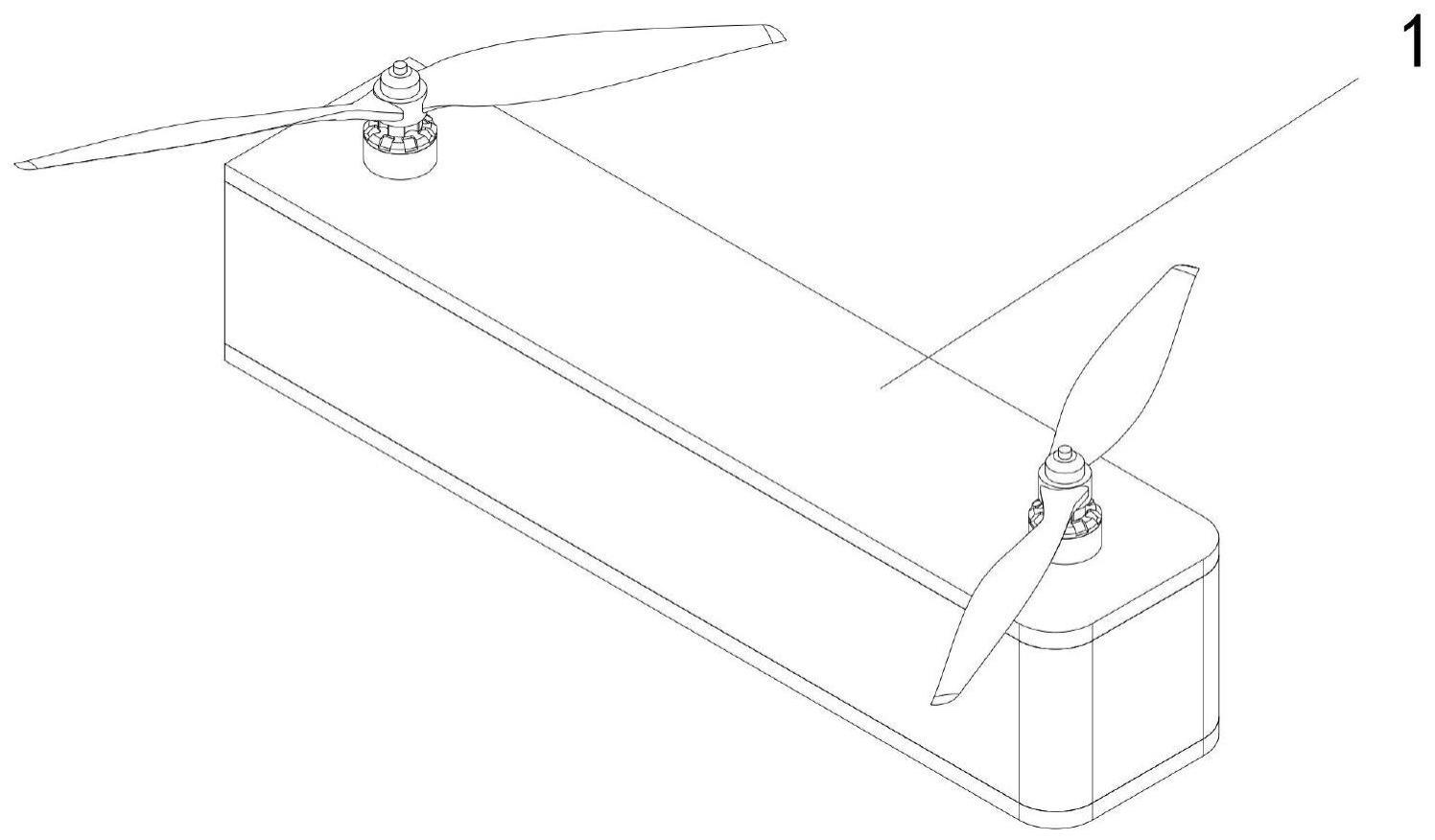
3、一种高载荷无人机,其特征在于:包括纵列双旋翼无人机、驱动系统、舱内流水线,驱动系统、舱内流水线均与纵列双旋翼无人机相连接。
4、作为本技术方案的进一步优化,本发明一种高载荷无人机,所述纵列双旋翼无人机包括无人机机架、动力组a、动力组b、电池组,其中动力组a、动力组b、外包围板、前置包围板、滑轮板a、滑轮板b、隔板均与无人机机架固定连接,隔板与电池组固定连接。
5、作为本技术方案的进一步优化,本发明一种高载荷无人机,所述驱动系统包括电机、斜接齿轮a、四通连杆、八通道连杆、l型九十度轨滑槽板、连杆齿条、齿轮a、齿条限位环、连杆a、滑轮组、连杆b、连杆限位轴、传感器、吸盘,其中电机支架、轴座a、轴座b、轴座c、轴座d均与底板固定连接,电机与电机支架固定连接,电机其输出轴与斜接齿轮a固定连接,斜接齿轮b、斜接齿轮c均与斜接齿轮a啮合连接,斜接齿轮b、四通连杆均与轴a固定连接,轴a与轴座b转动连接,滑轮a、滑轮b、滑轮c、滑轮b均与四通连杆转动连接,滑轮a、滑轮b、滑轮c、滑轮b均与八通道连杆连接,八通道连杆与轴座a转动连接,斜接齿轮c与轴b固定连接,轴b与双通连杆固定连接,滑轮e、滑轮f均与双通连杆转动连接,滑轮e、滑轮f均与十字连杆连接,十字连杆均与轴座d转动连接,十字连杆与同步带轮a固定连接,同步带轮a通过皮带a与同步带轮b转动连接,同步带轮b与l型连杆轴固定连接,l型连杆轴、固定螺栓、连杆限位轴均与l型九十度轨滑槽板转动连接,l型连杆轴与连杆齿条转动连接,连杆齿条与齿轮a啮合连接,连杆齿条与齿条限位环连接,齿轮a、连杆a均与固定螺栓固定连接,连杆a与滑轮组连接,滑轮组与连杆b转动连接,连杆b与连杆限位轴连接,连杆限位轴与传感器固定连接,连杆a与传感器触发器连接,连杆b与吸盘固定连接。
6、作为本技术方案的进一步优化,本发明一种高载荷无人机,所述舱内流水线包括传送带支撑板、同步带轮c、皮带b、同步带轮d、同步带轮g、皮带d、同步带轮h、带轴销轮a、滑块闸板a、带轴销轮b,其中同步带轮c通过皮带b与同步带轮d转动连接,同步带轮d、同步带轮e均与传送轮组a固定连接,传送轮组a与轴座e、轴座f转动连接,同步带轮e通过皮带c与同步带轮f转动连接,同步带轮f与传送轮组b固定连接,传送轮组b与轴座g、轴座h转动连接,传送轮组a、传送轮组b均与传送带转动连接,货物与传送带连接,同步带轮g通过皮带d与同步带轮h转动连接,同步带轮h、同步带轮i均与带轴销轮a固定连接,带轴销轮a与轴座f、滑道总成转动连接,带轴销轮a与连杆c连接,连杆c与滑块闸板a连接,滑块闸板a、滑块闸板b均与滑道总成连接,带轴销轮a、连杆c、带轴销轮b、连杆d均与道总成转动连接,同步带轮i通过皮带e与同步带轮j转动连接,同步带轮j与带轴销轮b固定连接,带轴销轮b与轴座h、滑道总成转动连接,带轴销轮b与连杆d连接,连杆d与滑块闸板b连接。
7、一种无人机载物方法,具体通过上文权利要求的一种高载荷无人机来实现,通过尾部滑轮组设计快速装入货物,利用双旋翼驱动特点结合滑轮组给予防撞防卡保护,通过单输入双输出的功能实现驱动组对于流水线、抓取、限位等等的单一控速,包括以下步骤:
8、s1、在现代物流体系中,物流的流通是以点到点的形式逐层递取,最终是以厢式货车为主要的输入工具,而在我国特色城市建设的背景下,部分历史街区、名胜古迹、城中聚集地都是物流运输体系中最为头疼的所在,其建筑密集度层次不齐,最基层的物流、餐饮转运都依靠人力资源完成,所以时而造成道路拥堵、交通事故等现象。为了解决以上几点存在现象,本发明提供一种高载荷无人机,可在复杂环境下通过空中路线快速、准确的完成小规模物流转运投放任务,其目的是舒缓大城市及普通城市复杂建筑群的物流汇集转运,也可做物流及餐饮的新型投放方法,首先从源头上缓解上述建筑区域中的交通拥挤问题,其具体实施方法为,将包裹从纵列双旋翼无人机1中尾部的外包围板104处向内放置,放置于舱内流水线3中的、传送带314上,包裹沿着滑轮板a106、滑轮板b107向前滑动,滑动过程中在多滑轮的运输下不会出现卡滞的现象,根据实际长度装满包裹,随后将外包围板104内的档板翻取装上,启动动力组a102、动力组b103,纵列双旋翼无人机1开始飞行作业,当无人机到达指定地点时,据地面或平台处四十公分处匀速飞行,准备投放作业;
9、s2、启动电机207,其电机输出轴带动斜接齿轮a208转动,斜接齿轮a208带动斜接齿轮b209、斜接齿轮c217转动,此处斜接齿轮b209与斜接齿轮c217的转动代表两组不同间歇机构转速组合,其斜接齿轮b209与斜接齿轮c217最终输出的具体间歇区域比例为斜接齿轮b209:斜接齿轮c217=2:1,其具体比例表现为,当斜接齿轮b209转动时通过轴a210带动四通连杆211转动,四通连杆211通过滑轮a212、滑轮b213、滑轮c214、滑轮b215带动八通道连杆216转动,每当斜接齿轮b209转动45°时带动八通道连杆216转动一格,转动90°时转动两格,此设计是为了实现同一输入不同输出的功能,其目的是匹配不同的结构和功能,集齐抓取投放、包裹运输以及舱内包裹限位等组合形式的自动化投放,当斜接齿轮c217转动时通过轴b218带动双通连杆219转动,双通连杆219通过滑轮e220、滑轮f221带动十字连杆237转动,当斜接齿轮c217转动90°时带动十字连杆237转动一格,十字连杆237总计四格转动单元,当十字连杆237转动一格时,八通道连杆216转动两格,形成左右差速,十字连杆237转动时带动同步带轮a222转动,同步带轮a222通过皮带a223带动同步带轮b224转动,同步带轮b224带动l型连杆轴225转动,l型连杆轴225转动时通过连杆齿条227带动齿轮a228转动,齿轮a228通过固定螺栓229带动连杆a231转动,连杆a231转动时通过滑轮组232带动连杆b233沿着连杆限位轴234内滑动,当十字连杆237转动一格时,连杆a231带动滑轮组232沿着l型九十度轨滑槽板226内滑动,滑轮组232带动连杆b233在连杆限位轴234的限制下最终呈平行状态向前伸出,连杆b233通过吸盘236将货物315吸附,当连杆a231转动至传感器235处触发其感应头,此时电机207作短暂停止运行,随后继续启动,当十字连杆237继续转动90°时,连杆a231通过滑轮组232带动连杆b233回缩,将货物315向后提取,当滑轮组232沿着l型九十度轨滑槽板226内轨道滑动至轨道内另一端时连杆b233通过吸盘236将货物315向下递送,沿着底板201内的下货孔将货物递送至无人机下方的平台或相关人员手中,随后各部复位至初始状态;
10、s3、当八通道连杆216转动时带动同步带轮c306转动,同步带轮c306通过皮带b307带动同步带轮d308转动,同步带轮d308带动传送轮组a309转动,传送轮组a309带动同步带轮e310转动,同步带轮e310通过皮带c311带动同步带轮f312转动,同步带轮f312带动传送轮组b313转动,传送轮组a309与传送轮组b313带动传送带314转动,传送带314带动货物315沿其表面向前移动,移动速率与驱动系统2中连杆b233抓取速率一致,当八通道连杆216转动时带动同步带轮g316转动,同步带轮g316通过皮带d317带动同步带轮h318转动,同步带轮h318带动带轴销轮a319转动,带轴销轮a319通过连杆c320带动滑块闸板a321沿着滑道总成328向下回缩,回缩过程中传送带314转动向前运输货物315,运输传送带314向前运输货物315过程中带轴销轮a319带动同步带轮i322转动,同步带轮i322通过皮带e323带动同步带轮j324转动,同步带轮j324带动带轴销轮b325转动,带轴销轮b325通过连杆d326带动滑块闸板b327沿着滑道总成328向上推动,当滑块闸板b327推举至最大行程时挡住无人机内传送带314尾部,避免由于无人机流水线停顿时货物315向后滑出,当滑块闸板b327推举至最大行程时滑块闸板a321回缩至滑道总成328内原点处,此时传送带314也将货物315输送至其边缘地带,而传送带314的驱动速率与连杆b233一致,所以此时连杆b233通过吸盘236顶住货物315,准备进行投放工作,货物315在完全吸附取出后,滑块闸板a321向上顶出,顶住传送带314上的待投放货物315,当货物315被完全投放后复位至初始状态,准备进行二次投放,实现纵列双旋翼无人机1完成货物的储存、运输与投放。
11、本发明一种高载荷无人机的有益效果为:
12、本发明的一种高载荷无人机及无人机载物方法,其有益效果为:1、通过尾部滑轮组设计快速装入货物,利用双旋翼驱动特点结合滑轮组给予防撞防卡保护;2、通过单输入双输出的功能实现驱动组对于流水线、抓取、限位等等的单一控速。
- 还没有人留言评论。精彩留言会获得点赞!