飞跃行走一体化机构
本发明涉及航天器机器人,尤其涉及一种飞跃行走一体化机构。
背景技术:
1、外星探测器依赖于探测装备完成探测任务,国际上常采用着陆器和巡视器设计外星探测器。外星探测器质量直接影响着探测成本,如果能把着陆器和巡视器融为一体,设计出可在地外星表反复着陆和行走的飞跃式机构,则能显著减小外星探测器的质量,大幅减少外星探测的成本。
2、目前国内外已实施的航天着陆探测任务,其巡视器都采用了轮式月球车的形式,虽然在相对平坦的地形中形式具有相当的优势,但是无法解决在松软土质上车轮沉陷和打滑的情况,且在复杂地形环境中越障能力和爬坡能力较弱;其着陆器都采用了高可靠、吸能强的被动缓冲技术,然而被动缓冲技术在着陆后不具备主动调整能力,足部自适应性差。
3、《一种在月球上的飞行方法以及月球飞行装置》(专利号:cn201910107832.6)公开了一种在月球上的飞行方法与月球飞行装置。虽然采用电能作为推进动力,克服了传统火箭发动机燃料有限的问题,但整体结构复杂、重量大,且太阳能充电效率低,单次飞行时间短。
4、基于上述因素,以往的探测器尚不同时具备飞跃和移动行走功能,且轮式行走系统环境适应性差,难以胜任复杂地形环境的探测任务。以电能为驱动力的飞行系统由于电量和功率问题无法进行远距离飞行。
5、另外现有技术还具有以下不足:
6、1、目前探测器着陆器和巡视器相分离,整体系统质量大,生产成本高,且探测范围有限。
7、2、轮式移动系统始终无法较好解决在松软土质上车轮沉陷或打滑的情况,且轮式移动系统在复杂地形环境中越障能力和爬坡能力较弱,难以到达一些特殊的探测地点。
8、3、目前,用于着陆缓冲的机构常常使用弹簧减震的被动缓冲机构,然而被动缓冲机构在着陆后常常不具备自我调节能力,且未来机器人在不同场合对腿部刚度和阻尼有不同的要求,被动缓冲机构无法满足变刚度的需求。
9、4、没有考虑星表不同地形的影响,地外星表多环形山、陨石坑、斜坡等,着陆、行走时能够紧密贴合星表是很有必要的。
技术实现思路
1、针对上述现有技术中的不足,本发明提供一种飞跃行走一体化机构,将涡喷发动机和足式移动系统结合在一起,使得机器人既可以通过涡喷发动机进行低空飞行又可以通过腿式机构进行落地缓冲和表面行走,提高了机器人对各种复杂地形的探测能力。
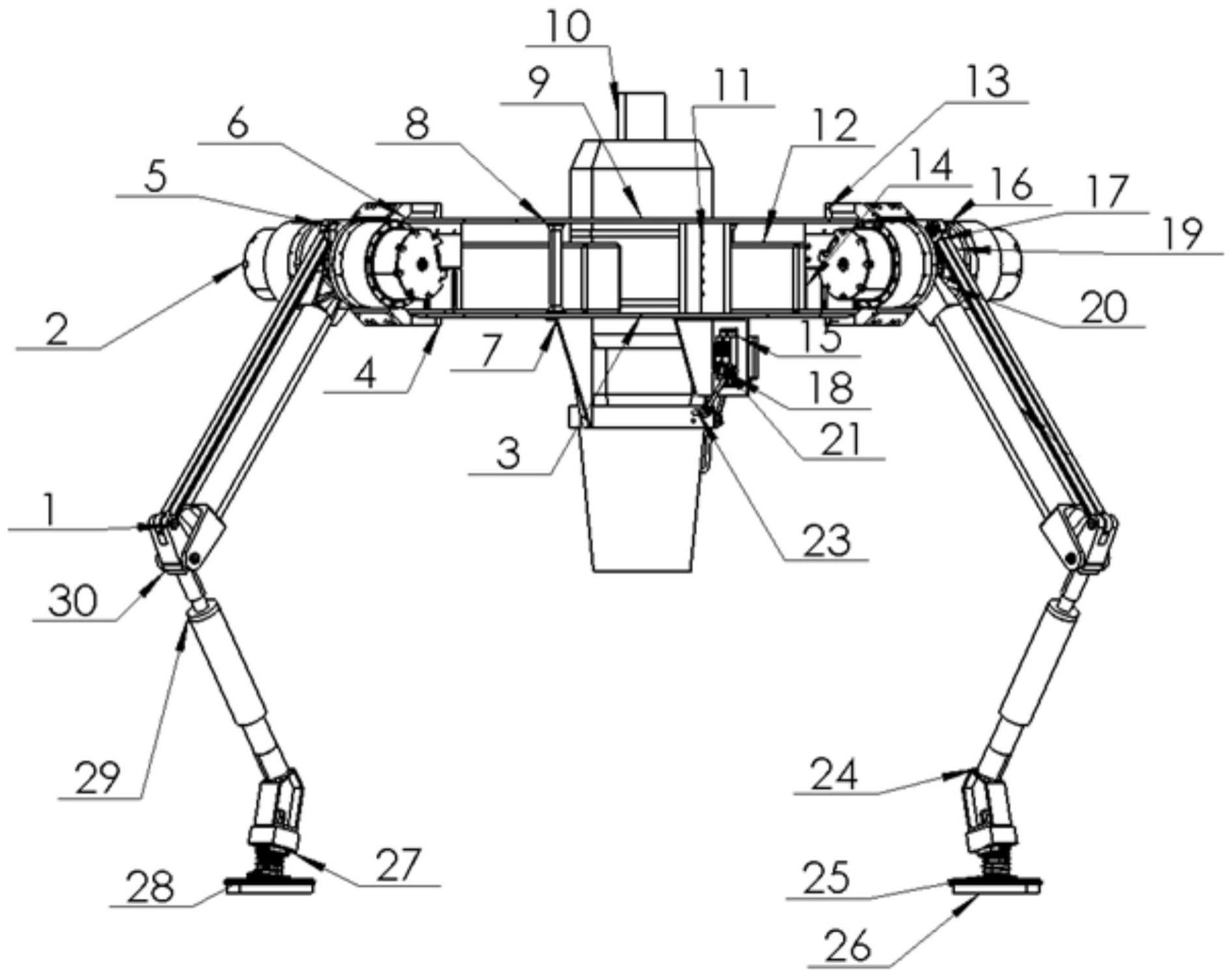
2、为了实现上述目的,本发明提供一种飞跃行走一体化机构,包括一机架、一涡喷发动机、一电源和一足式移动机构,所述足式移动机构包括四机械缓冲腿;所述涡喷发动机固定于所述机架的中部;所述电源固定于所述机架上;所述机械缓冲腿连接于所述机架的四角;每一所述机械缓冲腿包括一水平驱动电机、一固定支架、一髋关节驱动电机、一膝关节驱动电机、一双驱四杆机构、一磁流变阻尼器和一自适应地形足;所述水平驱动电机与所述固定支架传动连接并沿水平方向旋转传动所述固定支架;所述髋关节驱动电机和所述膝关节驱动电机固定于所述固定支架的两侧并与所述双驱四杆机构传动连接;所述双驱四杆机构通过所述磁流变阻尼器连接所述自适应地形足。
3、优选地,所述双驱四杆机构包括一髋关节连杆、一膝关节连杆和一膝关节;所述膝关节连杆的第一端与所述膝关节驱动电机传动连接,所述膝关节连杆的第二端通过一膝关节转动轴承连接所述膝关节的第一端;所述髋关节连杆的第一端与所述髋关节驱动电机传动连接,所述髋关节连杆的第二端连接所述膝关节的第二端。
4、优选地,所述磁流变阻尼器包括一导线、一活塞、一缸体和一励磁线圈;所述缸体内填充有磁流变液并固定有所述励磁线圈;所述活塞穿设于所述励磁线圈内;所述活塞中空并穿设有所述导线;所述活塞顶端连接所述膝关节的第二端;所述缸体连接所述自适应地形足。
5、优选地,所述自适应地形足包括一踝关节连杆、一力传感器、一万向球阀、一踝关节弹簧和一足垫;所述踝关节连杆连接所述缸体;所述踝关节连杆、所述力传感器和所述万向球阀依次螺接固定;所述万向球阀连接所述足垫;所述踝关节弹簧套设于所述万向球阀外并连接于所述万向球阀与所述足垫之间;所述踝关节连杆上部弯折一预设角度。
6、优选地,所述固定支架包括一第一电机固定板、一第二电机固定板、一第三电机固定板和一第四电机固定板;所述第一电机固定板和所述第二电机固定板平行设置;所述第三电机固定板和所述第四电机固定板竖直固定于所述第一电机固定板和所述第二电机固定板之间;所述髋关节驱动电机和所述膝关节驱动电机分别固定于所述第三电机固定板和所述第四电机固定板上;所述水平驱动电机与所述第一电机固定板或所述第二电机固定板传动连接。
7、优选地,还包括一矢量推进喷管、两喷管转动电机、两喷管电机固定架和若干喷管连杆;所述矢量推进喷管通过万向节连接于所述涡喷发动机的喷气口处;所述喷管转动电机通过所述喷管电机固定架固定于所述机架底面;所述喷管转动电机通过所述喷管连杆和喷管连杆轴承与所述矢量推进喷管传动连接。
8、优选地,所述机架包括一机架顶板和一机架底板;所述机架顶板和所述机架底板通过若干机架支撑柱相连;所述涡喷发动机通过一发动机固定架固定于所述机架的正中央。
9、本发明由于采用了以上技术方案,使其具有以下有益效果:
10、1、将涡喷发动机和足式移动系统结合在一起,使得机器人既可以通过涡喷发动机进行低空飞行又可以通过腿式机构进行落地缓冲和表面行走,提高了机器人对各种复杂地形的探测能力;可显著减小外星探测器的质量,大幅减少外星探测的成本,具有明显的经济价值;飞跃和行走一体化的设计也很大程度提高了机器人对各种复杂地形的探测能力和探测范围。
11、2、采用磁流变技术的可变刚度腿式机构,通过改变励磁电压的大小进而改变磁流变阻尼器的阻尼。当进行落地缓冲任务时减小励磁电压的大小,使阻尼器的阻尼下降,机构的刚度下降,从而减最大程度小落地时的冲击力对机构的损伤;当进行移动行走任务时,增大励磁电压的大小,使阻尼器的阻尼增大,机构的刚度上升,从而确保机器人能够正常行走;可显著提升机器人对不同硬度表面的适应能力。由于添加了磁流变阻尼器,可以通过对机器人目前进行的动作和足部接触的地面刚度进行识别,综合二者信息来控制励磁电压的大小,进而改变电磁阻尼器的阻尼,从而使机器人能有一个当前状态下最合适的腿部刚度。
12、3、结合了万向球阀和弹簧机构,设计了一种自适应性的足端机构。使得机器人落地时足端可以与各种倾角的表面紧密接触,从而减小地面对机器人足部的压强,提高机器人的稳定性和安全性,并且弹簧机构能够进一步吸收落地时的冲击能量,进一步缓解冲击力对机构的损伤。可显著提升机器人对不同坡度表面的适应能力。地外行星表面整体地形复杂崎岖,主要有撞击坑、高地、月海和风化层四种地形特征。由于外部机械结构的设计使得足端机构可以做多自由度转动,因此对于不同坡度的表面,机器人的足端在接触时都能很好紧密接触。
13、4、通过四连杆机构将驱动电机转移到髋关节上,以保证运动关节惯量最小,进而确保快速摆动腿运动和减少在与地面间歇性接触过程中的冲击损失。通过分离驱动部件与运动部件,减少了运动部件的能耗,保证了探测器在有限的能源储备下可以更高效地工作。
- 还没有人留言评论。精彩留言会获得点赞!