一种直升机共轴反转双旋翼轴装配角度控制的方法与流程
本发明属于机械结构,特别涉及一种直升机共轴反转双旋翼轴装配角度控制的方法。
背景技术:
1、共轴式直升机采用具有同一理论轴线且旋转方向相反两副旋翼轴来为直升机提共升力。相对于传统的单旋翼直升机,共轴式直升机有较多优势。由于两幅旋翼轴旋向相反,两副旋翼轴产生的扭矩在航向不变状态下相互抵消,因此不需要尾浆来平衡直升机扭矩,能减少尾浆相关机构的故障,且直升机的机身因没有尾浆而更短,直升机结构重心相比单旋翼更偏向直升机顺航向(前向),能减少直升机额定俯仰及偏航的转动惯量,使直升机的操纵性更好。因为有两幅旋翼轴提供升力,因此旋翼直径相对于单旋翼直升机更小,相同输入功率条件下直升机体积也更小,相应的重量也更小。
2、为保证共轴式直升机在飞行时的气动干扰最小,两副旋翼的相对角度需保持一定。因现有直升机的旋翼和旋翼轴的相对角度多数采用固定的定位键或花键缺口确定,因此需要旋翼轴在安装时保证一定的相对角度,来保证两副旋翼的相对角度。目前对共轴反转双旋翼轴装配角度控制多采用工装进行限位来达到角度控制要求,对工装的精度需求较高且调节难度较高,存在多次使用工装调整才能装配到理想角度的情况,影响装配效率。根据旋翼轴及传动齿轮的结构、齿轮模数等情况不同,工装不能在多种共轴反转双旋翼轴的装配中使用,每个构型的共轴反转双旋翼轴都加工一套工装,成本较高。
技术实现思路
1、本发明的目的:提供一种直升机共轴反转双旋翼轴装配角度控制的方法,针对现有共轴式直升机的旋翼轴无有效的安装角度控制方法而提出。本发明利用共轴式直升机传动系统结构分析,在两副旋翼轴和旋翼轴扭矩传动齿轮的加工及装配过程进行相应控制,使装配后的两副旋翼轴满足装配角度的要求。
2、本发明的技术方案
3、一种直升机共轴反转双旋翼轴装配角度控制的方法,分析两副旋翼轴装配结构特点,在旋翼轴及旋翼轴扭矩传动齿轮加工检验时,增加角度控制标识,在旋翼轴装配时根据角度控制标识计算旋翼轴与旋翼轴扭矩传动齿轮的装配角度,而后在旋翼轴扭矩传动齿轮上再次标记装配位置,以保证装配后两副旋翼轴角度满足要求。
4、进一步,所述的方法包括以下步骤:
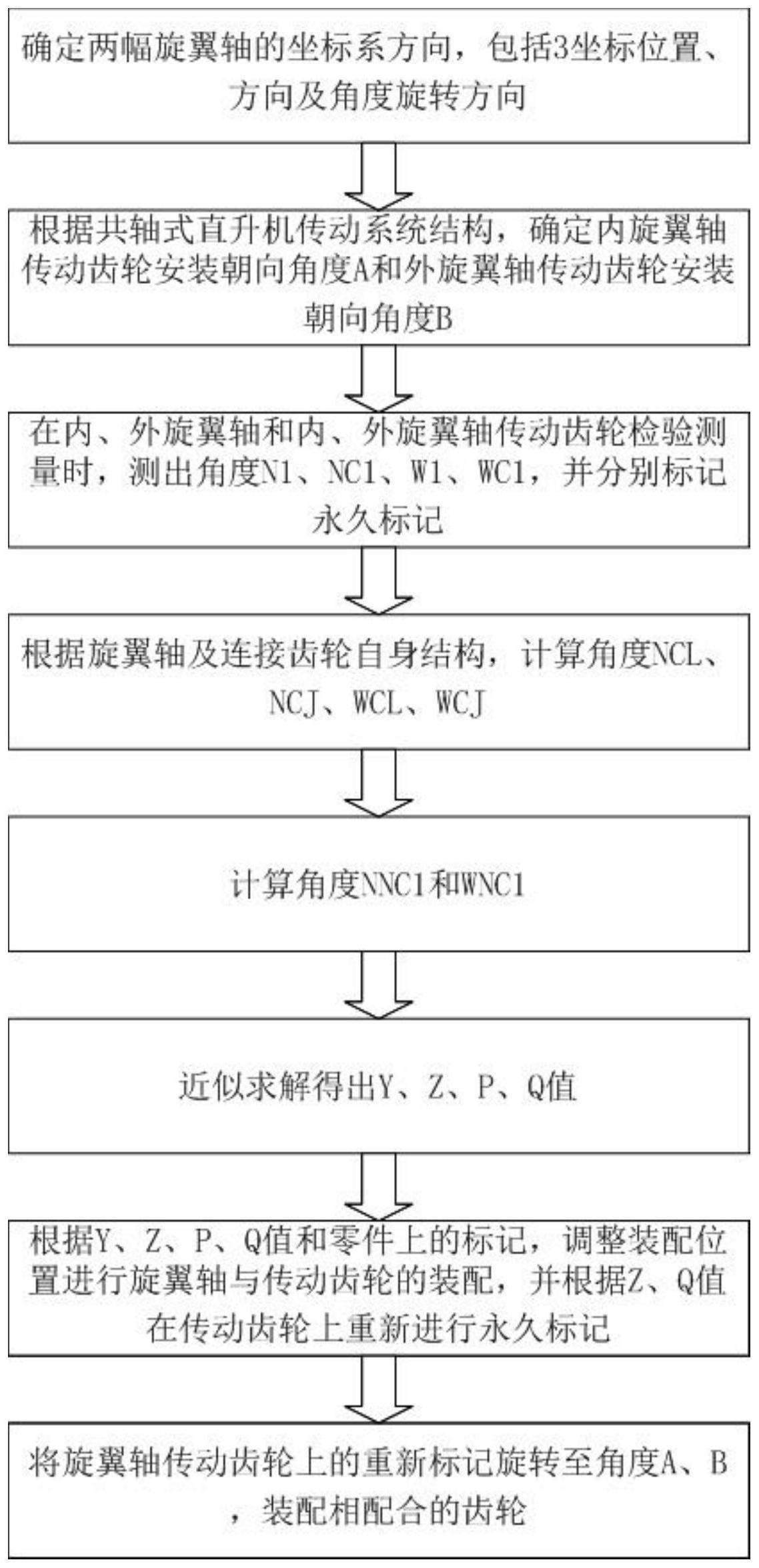
5、步骤1:建立坐标系,确定共轴反转的内旋翼轴n和外旋翼轴w的坐标系方向;
6、步骤2:确定内旋翼轴传动齿轮nc安装朝向角度a和外旋翼轴传动齿轮wc安装朝向角度b;
7、步骤3:确定内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为花键连接或螺栓螺钉连接,在内旋翼轴n、内旋翼轴传动齿轮nc上进行角度控制标识;
8、步骤4:确定外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为花键连接或螺栓螺钉连接,在外旋翼轴w、外旋翼轴传动齿轮wc上进行角度控制标识;
9、步骤5:内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为花键连接时,确定内旋翼轴传动齿轮nc连接花键的相邻花键间隔角度ncl1;内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为螺栓螺钉连接时,确定内旋翼轴传动齿轮nc连接螺栓螺钉相邻孔间隔角度ncl2;再确定内旋翼轴传动齿轮nc相邻轮齿的间隔角度ncj;
10、步骤6:外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为花键连接时,确定外旋翼轴传动齿轮wc连接花键的相邻花键间隔角度wcl1;外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为螺栓螺钉连接时,确定外旋翼轴传动齿轮wc连接螺栓螺钉相邻孔间隔角度wcl2;再确定外旋翼轴传动齿轮wc相邻轮齿的间隔角度wcj;
11、步骤7:计算内旋翼轴n与内旋翼轴传动齿轮nc的装配角度;
12、步骤8:计算外旋翼轴w与外旋翼轴传动齿轮wc的装配角度;
13、步骤9:按照计算的内旋翼轴n与内旋翼轴传动齿轮nc的装配角度,将内旋翼轴传动齿轮nc装配到内旋翼轴n上,在内旋翼轴传动齿轮nc上再次标记新的装配位置;
14、步骤10:按照计算的外旋翼轴w与外旋翼轴传动齿轮wc的装配角度,将外旋翼轴传动齿轮wc装配到外旋翼轴w上,在外旋翼轴传动齿轮wc上再次标记新的装配位置;
15、步骤11:将内旋翼轴传动齿轮nc上新的标记装配位置旋转至角度a,将外旋翼轴传动齿轮wc上新的标记装配位置旋转至角度b即可。
16、进一步,步骤1具体是:根据两副旋翼轴装配结构特点,将旋翼轴分为内旋翼轴n和外旋翼轴w,建立三维直角坐标系,确定坐标系方向以及角度旋转方向,确定内旋翼轴n、内旋翼轴传动齿轮nc、外旋翼轴w、外旋翼轴传动齿轮wc在坐标系下的安装位置,确定内旋翼轴n相对坐标系下的角度要求值dc和外旋翼轴相对坐标系下的角度要求值ec。
17、进一步,步骤3中:
18、当内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为花键连接时,在坐标系中,测量内旋翼轴n的某个齿轮连接花键齿槽中心相对旋翼定位键或花键缺口中心的角度n1,并在内旋翼轴n的该齿轮连接花键齿槽中心用永久标印方式标印,同时,测量内旋翼轴传动齿轮nc的某个轮齿齿顶中心相对某个齿轮连接花键齿顶中心的角度nc1,并在内旋翼轴传动齿轮nc的该齿轮连接花键齿顶中心与轮齿齿顶中心用永久标印方式标印;
19、当内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为螺栓螺钉连接时,在坐标系中,测量内旋翼轴n的某个齿轮连接螺栓螺钉孔中心相对旋翼定位键或花键缺口中心的角度n2,并在当内旋翼轴n的该齿轮连接螺栓螺钉孔处用永久标印方式标印,同时,测量内旋翼轴传动齿轮nc的某个轮齿齿顶中心相对某个齿轮连接螺栓螺钉孔中心的角度nc2,并在该齿轮连接螺栓螺钉孔处与轮齿齿顶中心用永久标印方式标印;
20、进一步,步骤4中:
21、当外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为花键连接时,在坐标系中,测量外旋翼轴w的某个齿轮连接花键齿槽中心相对旋翼定位键或花键缺口中心的角度w1,并在该齿轮连接花键齿槽中心用永久标印方式标印;同时,测量外旋翼轴传动齿轮wc的某个轮齿齿顶中心相对某个齿轮连接花键齿顶中心的角度wc1,并在外旋翼轴传动齿轮wc的该齿轮连接花键齿顶中心与轮齿齿顶中心用永久标印方式标印;
22、当外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为螺栓螺钉连接时,在坐标系中,测量外旋翼轴w的某个齿轮连接螺栓螺钉孔中心相对旋翼定位键或花键缺口中心的角度w2,并在该齿轮连接螺栓螺钉孔处用永久标印方式标印;同时,测量外旋翼轴传动齿轮wc的某个轮齿齿顶中心相对某个齿轮连接螺栓螺钉孔中心的角度wc2,并在外旋翼轴传动齿轮wc的该齿轮连接螺栓螺钉孔处与轮齿齿顶中心用永久标印方式标印。
23、进一步,步骤7包括:
24、当内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为花键连接时,通过以下公式计算内旋翼轴n与内旋翼轴传动齿轮nc的装配角度nnc1,nnc1=a-dc-n1,其中,nnc1为内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为花键连接方式下的内旋翼轴n与内旋翼轴传动齿轮nc的装配角度,a是内旋翼轴传动齿轮nc安装朝向角度,dc是内旋翼轴n相对坐标系下的角度要求值,n1是内旋翼轴n的某个齿轮连接花键齿槽中心相对旋翼定位键或花键缺口中心的角度;
25、当内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为花键连接时,再通过以下公式近似估算内旋翼轴传动齿轮nc在坐标系下旋转的齿轮连接花键数量y1以及内旋翼轴传动齿轮nc在坐标系下旋转的轮齿个数z1,y1×ncl1+z1×ncj+nc1≒nnc1,其中y1、z1均为整数,且y1值范围为坐标系下的正负齿轮连接花键数量,z1值范围为为坐标系下的正负齿轮齿数;
26、当内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为螺栓螺钉连接时,通过以下公式计算内旋翼轴n与内旋翼轴传动齿轮nc的装配角度nnc2,nnc2=a-dc-n2,其中,nnc2为内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为螺栓螺钉连接方式下的内旋翼轴n与内旋翼轴传动齿轮nc的装配角度,a是内旋翼轴传动齿轮nc安装朝向角度,dc是内旋翼轴n相对坐标系下的角度要求值,n2是内旋翼轴n的某个齿轮连接花键齿槽中心相对旋翼定位键或花键缺口中心的角度;
27、当内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为螺栓螺钉连接时,再通过以下公式近似估算内旋翼轴传动齿轮nc在坐标系下旋转的齿轮连接花键数量y2以及内旋翼轴传动齿轮nc在坐标系下旋转的轮齿个数z2,y2×ncl2+z2×ncj+nc2≒nnc2,其中y2、z2均为整数,且y2值范围为坐标系下的正负螺钉螺栓孔数,z2值范围为为坐标系下的正负齿轮齿数。
28、进一步,步骤8包括:
29、当外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为花键连接时,通过以下公式计算外旋翼轴w与外旋翼轴传动齿轮wc的装配角度wnc1,wnc1=b-ec-w1,其中,wnc1为外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为花键连接方式下的外旋翼轴w与外旋翼轴传动齿轮wc的装配角度,b是外旋翼轴传动齿轮nc安装朝向角度,ec是外旋翼轴w相对坐标系下的角度要求值,w1是外旋翼轴w的某个齿轮连接花键齿槽中心相对旋翼定位键或花键缺口中心的角度;
30、当外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为花键连接时,再通过以下公式近似估算外旋翼轴传动齿轮wc在坐标系下旋转的齿轮连接花键p1以及外旋翼轴传动齿轮wc在坐标系下旋转的轮齿个数q1,p1×wcl1+q1×wcj+wc1≒wnc1,其中p1、q1均为整数,且p1值范围为坐标下的正负花键数,q1值范围为正负齿轮齿数;
31、当外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为螺栓螺钉连接时,通过以下公式计算外旋翼轴w与外旋翼轴传动齿轮wc的装配角度wnc2,wnc2=b-ec-w2,其中,wnc2为外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为螺栓螺钉连接方式下的外旋翼轴w与外旋翼轴传动齿轮wc的装配角度,b是外旋翼轴传动齿轮nc安装朝向角度,ec是外旋翼轴w相对坐标系下的角度要求值,w2是外旋翼轴w的某个齿轮连接花键齿槽中心相对旋翼定位键或花键缺口中心的角度;
32、当外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为螺栓螺钉连接时,再通过以下公式近似估算外旋翼轴传动齿轮wc在坐标系下旋转的齿轮连接花键p2以及外旋翼轴传动齿轮wc在坐标系下旋转的轮齿个数q2,p2×wcl2+q2×wcj+wc2≒wnc2,其中p2、q2均为整数,且p2值范围为坐标下的正负花键数,q2值范围为正负齿轮齿数。
33、进一步,步骤9中:
34、当内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为花键连接时,按照计算的内旋翼轴n与内旋翼轴传动齿轮nc的装配角度,将内旋翼轴传动齿轮nc装配到内旋翼轴n上时,将带有永久标印的内旋翼轴n的齿轮连接花键与带有永久标印内旋翼轴传动齿轮nc的齿轮连接花键对齐,再将内旋翼轴传动齿轮nc沿坐标系规定方向旋转y1个花键后进行装配,装配后将内旋翼轴传动齿轮nc的轮齿齿顶永久标记再沿坐标系规定方向旋转z1个轮齿,重新在内旋翼轴传动齿轮nc的齿顶上标记新的永久标记,并将y1和z1值永久标记在该轮齿附近位置;
35、当内旋翼轴n与内旋翼轴传动齿轮nc的连接方式为螺栓螺钉连接时,按照计算的内旋翼轴n与内旋翼轴传动齿轮nc的装配角度,将内旋翼轴传动齿轮nc装配到内旋翼轴n上时,将带有永久标印的内旋翼轴n的齿轮连接螺栓螺钉孔与带有永久标印内旋翼轴传动齿轮nc的齿轮连接螺栓螺钉孔对齐,再将内旋翼轴传动齿轮nc沿坐标系规定方向旋转y2个螺栓螺钉孔后进行装配,装配后将内旋翼轴传动齿轮nc的轮齿齿顶永久标记再沿坐标系规定方向旋转z2个轮齿,重新在内旋翼轴传动齿轮nc的齿顶上标记新的永久标记,并将y2和z2值永久标记在该轮齿附近位置。
36、进一步,步骤10中:
37、当外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为花键连接时,按照计算的外旋翼轴w与外旋翼轴传动齿轮wc的装配角度,将外旋翼轴传动齿轮wc装配到外旋翼轴w上时,将带有永久标印的外旋翼轴w的齿轮连接花键与带有永久标印外旋翼轴传动齿轮wc的齿轮连接花键对齐,再将外旋翼轴传动齿轮wc沿坐标系规定方向旋转p1个花键后进行装配,装配后将外旋翼轴传动齿轮wc的轮齿齿顶永久标记再沿坐标系规定方向旋转q1个轮齿,重新在外旋翼轴传动齿轮wc的齿顶上标记新的永久标记,并将p1和q1值永久标记在该轮齿附近位置;
38、当外旋翼轴w与外旋翼轴传动齿轮wc的连接方式为螺栓螺钉连接时,按照计算的外旋翼轴w与外旋翼轴传动齿轮wc的装配角度,将外旋翼轴传动齿轮wc装配到外旋翼轴w上时,将带有永久标印的外旋翼轴w的齿轮连接螺栓螺钉孔与带有永久标印外旋翼轴传动齿轮wc的齿轮连接螺栓螺钉孔对齐,再将外旋翼轴传动齿轮wc沿坐标系规定方向旋转p2个螺栓螺钉孔后进行装配,装配后将外旋翼轴传动齿轮wc的轮齿齿顶永久标记再沿坐标系规定方向旋转q2个轮齿,重新在外旋翼轴传动齿轮wc的齿顶上标记新的永久标记,并将p2和q2值永久标记在该轮齿附近位置。
39、进一步,步骤11具体是:将内旋翼轴传动齿轮nc上新的永久标记装配位置旋转至角度a,将外旋翼轴传动齿轮wc上新的永久标记装配位置旋转至角度b,再装配与内旋翼轴传动齿轮nc以及外旋翼轴传动齿轮wc相配合的其他齿轮。
40、本发明的有益效果:
41、本发明提供一种直升机共轴反转双旋翼轴装配角度控制的方法,通过本方法可以在旋翼轴装配前快速完成装配角度的确定,节省两幅旋翼轴调整角度的时间,提高装配效率。且该方法具有可重复操作性,永久标记可多次使用,重新装配或更换部分零件装配都能根据该方法快速找到装配位置,提高重复装配及修理的装配效率。且无需使用工装的辅助工具,能有效降低装配时间和成本。
- 还没有人留言评论。精彩留言会获得点赞!