一种无人机翻转装置及其翻转方法与流程
本发明属于无人机检测的,涉及一种无人机翻转装置及其翻转方法。
背景技术:
1、目前国内无人机翻转技术主要应用于火箭发射无人机推力线测量,现有的推力线测量翻转无人机的方法主要为将无人机固定在翻转装置上,人工进行手动翻转180°至机腹朝上,再将推力线测量装置安装至机腹,最后吊起无人机进行测量。此方法须人工辅助进行翻转,必须人员高空作业安装推力线测量装置,翻转测量时间长,耗费人力物力,且存在一定安全隐患。同时,在起吊无人机的过程中,通过吊绳难以控制无人机的晃动,严重影响了推力线测量的准确性。
技术实现思路
1、本发明的目的在于提供一种无人机翻转装置及其翻转方法,能够平稳的实现无人翻转无人机作业,同时在翻转、悬吊过程中有效降低无人机的晃动幅度,提高了无人机推力线检测效率、安全性的同时,还有效保证了无人机推力线的检测准确性。
2、本发明通过下述技术方案实现:
3、一种无人机翻转装置,包括底座,所述底座的顶部设置有至少一处门形框架,所述门形框架上转动设置有托架,所述托架的底部与底座的顶部之间设置有带动托架相对于底座转动的翻转装置;所述托架的顶部设置有若干组无人机抱紧装置,所述无人机抱紧装置的一侧设置有带动无人机抱紧装置靠近或远离无人机移动的撤离装置,所述托架顶部靠近吊绳的一端设置有调节吊绳扭力的扭力释放装置,所述扭力释放装置的扭转端通过吊绳与无人机的一端连接。
4、托架在翻转装置的带动下能够相对于底座进行一定角度的翻转,托架上对应无人机外部的滑块的位置设置有若干组无人机抱紧装置,通过无人机抱紧装置对无人机外部的滑块进行抱紧夹持,进而实现无人机在托架上的稳固固定。然后即可通过翻转装置带动托架以及固定的无人机稳固快速的翻转至预定位置,取代了传统无人机翻转作业中人工翻转无人机的过程,进而提高了无人机的翻转效率,也保障了无人机翻转过程中的安全性。无人机翻转到位后,即可准备进行推力线测量作业。将吊绳与无人机连接,并通过扭力释放装置调节吊绳的释放量,使得吊绳达到预定的张力,保证了了吊绳能够稳定悬吊无人机。然后取消无人机抱紧装置对无人机的夹持,并通过撤离装置带动无人机抱紧装置朝向远离无人机的方向移动,避免无人机抱紧装置对无人机的悬吊造成干涉。然后即可将吊绳与推力线测量装置连接,进而测量无人机的推力线。
5、为了更好地实现本发明,进一步的,所述无人机抱紧装置包括抱紧架、抱紧夹头,所述抱紧架转动或滑动设置在托架的顶部,所述抱紧架靠近无人机的一侧上线性滑动设置有能够相互靠近或相互远离移动的抱紧夹头,所述抱紧夹头靠近无人机的一端设置有至少一个用于抱紧夹持无人机滑块的夹持部。
6、为了更好地实现本发明,进一步的,所述抱紧夹头的一侧设置有线性驱动装置,所述线性驱动装置用于带动抱紧夹头线性相互靠近移动以夹持无人机或带动抱紧夹头线性线性相互远离移动以松开无人机。
7、为了更好地实现本发明,进一步的,所述撤离装置包括电动推杆、连杆机构,所述电动推杆设置在托架的顶部,所述电动推杆的驱动端通过连杆机构与抱紧架的一侧连接,所述电动推杆通过伸缩带动抱紧架朝向靠近或远离无人机的方向移动。
8、为了更好地实现本发明,进一步的,所述扭力释放装置包括扭力释放机,所述扭力释放机的释放轮上绕设有吊绳,所述吊绳的自由端上设置有快连接头。
9、为了更好地实现本发明,进一步的,所述扭力释放装置的释放轮的释放端设置有用于检测吊绳张力的拉力传感器。
10、一种无人机翻转方法,基于上述无人机翻转装置实现,包括以下步骤:
11、步骤1、托架保持水平状态,将无人机吊装至托架的顶部,并通过最靠近无人机重心的无人机抱紧装置对无人机外部的滑块进行预定位夹持,然后对应无人机外部其余滑块的位置,通过撤离装置适应性带动其余无人机抱紧装置靠近无人机移动;
12、步骤2、微调无人机的位置,使得无人机外部的滑块与无人机抱紧装置之间的定位误差全部达标后,通过无人机抱紧装置将无人机外部的所有滑块夹持定位实现对无人机的完全固定;
13、步骤3、通过翻转装置带动托架翻转至预定位置,并在翻转过程中实时监测无人机的重心位置;
14、步骤4、将吊绳与无人机的一端连接,然后通过扭力释放装置调节吊绳的释放量,并通过拉力传感器监测吊绳的张力,直到吊绳的张力达到标定范围;
15、步骤5、释放无人机抱紧装置,通过撤离装置带动释放后的无人机抱紧装置朝向远离无人机的方向移动,并在释放过程中实时监测无人机的重心位置,根据重心位置变化通过扭力释放装置实时调节吊绳的释放量,使得无人机保持稳定;
16、步骤6、无人机保持稳定的状态下,将吊绳的一端与推力线测量装置连接,通过推力线测量装置测量无人机的推力线。
17、所述步骤5中,按照距离无人机重心从远至近的顺序依次释放无人机抱紧装置,每释放一个无人机抱紧装置,就根据无人机的重心位置变化通过扭力释放装置实时调节吊绳的释放量,保证无人机的实际重心位置与标定重心位置之间的误差小于等于5%。
18、本发明与现有技术相比,具有以下优点及有益效果:
19、(1)本发明通过在托架上对应无人机外部的滑块的位置设置若干无人机抱紧装置,通过无人机抱紧装置对无人机外部的滑块进行夹持固定,使得无人机稳固安装在托架上,然后即可通过翻转装置带动托架进行翻转,使得无人机伴随托架进行高效稳固的翻转,大大提升了无人机的翻转效率,并保证了无人机翻转过程的安全性;
20、(2)在无人机翻转至预定位置后,通过逐渐释放无人机抱紧装置,同时通过扭力释放装置根据无人机的重心位置变化实时调节吊绳的释放量,进而使得吊绳的张力始终保持的稳固悬吊无人机的范围之内,保证了取消所有无人机抱紧装置之后,吊绳能够稳定悬吊无人机,有效避免无人机的晃动,进而保证了无人机推力线检测的准确性。
技术特征:
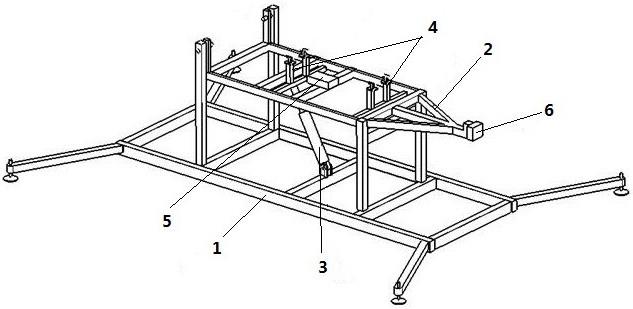
1.一种无人机翻转装置,包括底座(1),其特征在于,所述底座(1)的顶部设置有至少一处门形框架,所述门形框架上转动设置有托架(2),所述托架(2)的底部与底座(1)的顶部之间设置有带动托架(2)相对于底座(1)转动的翻转装置(3);所述托架(2)的顶部设置有若干组无人机抱紧装置(4),所述无人机抱紧装置(4)的一侧设置有带动无人机抱紧装置(4)靠近或远离无人机移动的撤离装置(5),所述托架(2)顶部靠近吊绳的一端设置有调节吊绳扭力的扭力释放装置(6),所述扭力释放装置(6)的扭转端通过吊绳(7)与无人机的一端连接。
2.根据权利要求1所述的一种无人机翻转装置,其特征在于,所述无人机抱紧装置(4)包括抱紧架、抱紧夹头,所述抱紧架转动或滑动设置在托架(2)的顶部,所述抱紧架靠近无人机的一侧上线性滑动设置有能够相互靠近或相互远离移动的抱紧夹头,所述抱紧夹头靠近无人机的一端设置有至少一个用于抱紧夹持无人机滑块的夹持部。
3.根据权利要求2所述的一种无人机翻转装置,其特征在于,所述抱紧夹头的一侧设置有线性驱动装置,所述线性驱动装置用于带动抱紧夹头线性相互靠近移动以夹持无人机或带动抱紧夹头线性线性相互远离移动以松开无人机。
4.根据权利要求3所述的一种无人机翻转装置,其特征在于,所述撤离装置(5)包括电动推杆、连杆机构,所述电动推杆设置在托架(2)的顶部,所述电动推杆的驱动端通过连杆机构与抱紧架的一侧连接,所述电动推杆通过伸缩带动抱紧架朝向靠近或远离无人机的方向移动。
5.根据权利要求4所述的一种无人机翻转装置,其特征在于,所述扭力释放装置(6)包括扭力释放机,所述扭力释放机的释放轮上绕设有吊绳(7),所述吊绳(7)的自由端上设置有快连接头。
6.根据权利要求5所述的一种无人机翻转装置,其特征在于,所述扭力释放装置(6)的释放轮的释放端设置有用于检测吊绳(7)张力的拉力传感器。
7.一种无人机翻转方法,基于权利要求1-6任一项无人机翻转装置实现,其特征在于,包括以下步骤:
8.根据权利要求7所述的一种无人机翻转方法,其特征在于,所述步骤5中,按照距离无人机重心从远至近的顺序依次释放无人机抱紧装置(4),每释放一个无人机抱紧装置(4),就根据无人机的重心位置变化通过扭力释放装置(6)实时调节吊绳(7)的释放量,保证无人机的实际重心位置与标定重心位置之间的误差小于等于5%。
技术总结
本发明公开了一种无人机翻转装置及其翻转方法,通过在托架上设置若干无人机抱紧装置,通过无人机抱紧装置对无人机外部的滑块进行夹持固定,使得无人机稳固安装在托架上,然后即可通过翻转装置带动托架进行翻转,使得无人机伴随托架进行高效稳固的翻转,大大提升了无人机的翻转效率,并保证了无人机翻转过程的安全性;在无人机翻转至预定位置后,通过逐渐释放无人机抱紧装置,同时通过扭力释放装置根据无人机的重心位置变化实时调节吊绳的释放量,进而使得吊绳的张力始终保持的稳固悬吊无人机的范围之内,保证了取消所有无人机抱紧装置之后,吊绳能够稳定悬吊无人机,有效避免无人机的晃动,进而保证了无人机推力线检测的准确性。
技术研发人员:彭海真,陈纳芝,陈思嘉,唐茂华
受保护的技术使用者:成都飞机工业(集团)有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!