一种基于胶囊构型的四旋翼无人机的制作方法
本发明涉及四旋翼无人机,尤其是涉及一种基于胶囊构型的四旋翼无人机。
背景技术:
1、常见的多旋翼机体布局方式有三旋翼、四旋翼、六旋翼、八旋翼和环形旋翼。根据不同的任务需求,可以选择不同的布局方式。
2、四旋翼是比较常见的多旋翼无人机旋翼布局方式。四旋翼无人机具有适中的稳定性,这种特性使得它非常适合无人机航拍活动,消费级无人机市场均为四旋翼布局。
3、目前,常规的四旋翼无人机的机体构型一般基于方形体构型,方形棱角处进行圆弧处理以降低风阻,增加结构的强度,这种构型的四旋翼无人机飞行姿态较为稳定,缺点是风阻大,能耗大,不能实现高速飞行,机动性较差。
技术实现思路
1、为了解决常规的四旋翼无人机的机体构型一般基于方形体构型,风阻大,能耗大,不能实现高速飞行,机动性较差的技术问题,本发明提供一种基于胶囊构型的四旋翼无人机。采用如下的技术方案:
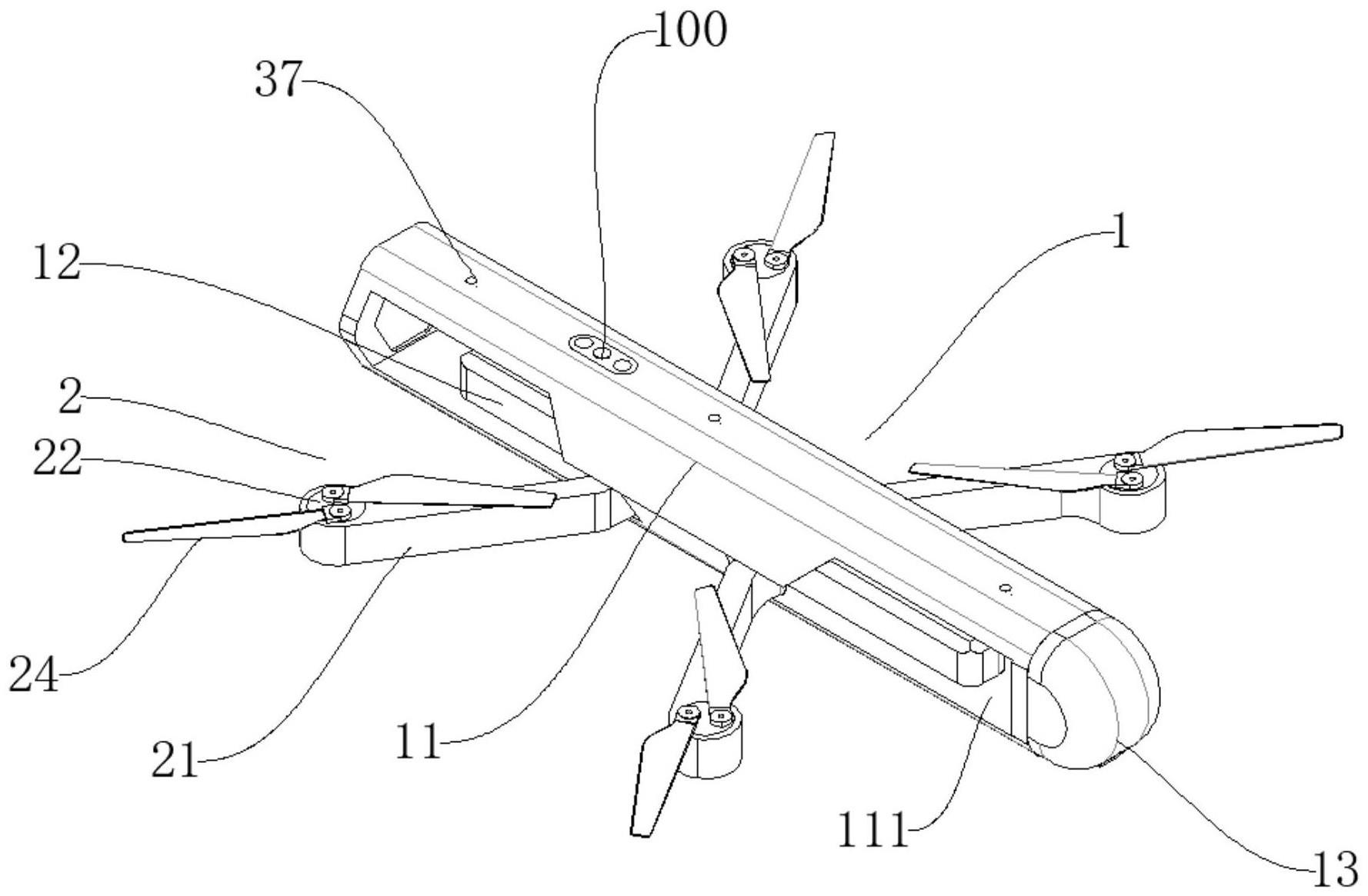
2、一种基于胶囊构型的四旋翼无人机,包括机身组件、四旋翼组件和无人机飞控系统,所述机身组件基于胶囊状构型设置,侧面设置用于收纳四旋翼组件的收纳槽,所述四旋翼组件包括四个可折叠收入收纳槽的旋翼装置构成,所述无人机飞控系统控制四旋翼组件的执行动作,实现四旋翼无人机的空中旋翼展开及收拢动作和静默滑行动作。
3、通过采用上述技术方案,四旋翼无人机的机身组件基于胶囊状构型设置,整体呈管状,其长宽比大于3,大大减小四旋翼无人机前进方向的风阻,同时胶囊头部呈半圆状,也能很好地降低风阻,可以实现高速飞行,且在地面雷达监测中其仅仅呈现线条状,极不容易被发现,在机身组件的侧面置用于收纳四旋翼组件的收纳槽,目的是将四个旋翼装置收纳其中,可以更好地应对空中投放场景,对于无人机群的投放,一般采用一个集中的投放仓挂载四旋翼无人机,如果旋翼装置呈展开状态,那么同样的投放仓能够挂载的四旋翼无人机数量远远少于可收纳旋翼装置的四旋翼无人机,在被投放后,四旋翼组件自动展开进行正常飞行,再配合无人机飞控系统的控制可以实现空中旋翼展开及收拢动作和静默滑行动作,静默滑行动作是指在四旋翼无人机处于较高的飞行高度和前进速度下可以执行短时间的无线电静默滑行,可以通过滑行躲避电子侦查。
4、可选的,所述机身组件包括外机壳、内部壳体和头部壳体,所述外机壳的外形呈胶囊状,两侧分别设置一对收纳槽,所述内部壳体可拆卸式安装在外机壳内壁的底面上,内部用于安装电器件,所述头部壳体呈半球状,安装在外机壳的端部。
5、通过采用上述技术方案,机身组件分为两部分,外机壳呈胶囊状,满足减少风阻的作用,内部壳体用于安装各个电器件。
6、可选的,外机壳的外表面涂抹电磁屏蔽涂层,外机壳的上下表面分别均匀设置多个通信电线孔。
7、通过采用上述技术方案,电磁屏蔽涂层设置的目的是进一步减小四旋翼无人机被雷达发现的可能性,特别是静默滑行动作时,旋翼装置处于收纳状态,内部各电器件进行断电,四旋翼无人机基本实现无线电静默。
8、可选的,旋翼装置包括旋翼机臂、旋翼电机、折叠电机和桨叶,所述旋翼机臂的一端通过转轴安装在外机壳的收纳槽处,所述折叠电机安装在外机壳设置的安装位,通过传动装置驱动旋翼机臂沿着转轴转动,实现旋翼装置的展开及收拢动作,旋翼机臂的另一端设置旋翼电机安装槽,所述旋翼电机的壳体安装在旋翼电机安装槽内,所述桨叶安装在旋翼电机的主动轴上,并在旋翼电机主动轴的驱动下为四旋翼无人机提供升力。
9、通过采用上述技术方案,旋翼装置的配置在常规的旋翼机臂、旋翼电机和桨叶的基础上增加折叠电机,为了实现旋翼装置的自动收拢和展开。
10、可选的,无人机飞控系统包括基于无人机飞控芯片的主控电路板、导航芯片、gps模块、光学传感模块、电调模块、电池组和多根电子增益天线,所述导航芯片、gps模块和电调模块分别集成在主控电路板上,所述主控电路板和电池组分别布置在内部壳体中,头部壳体采用透明材质制成,所述光学传感模块设置在头部壳体中,导航芯片、gps模块、光学传感模块和电调模块分别与主控电路板通信连接,多根电子增益天线分别设置在外机壳的上下表面的多个通信电线孔处,主控电路板通过多根电子增益天线与外部进行无线通信,主控电路板通过电调模块控制旋翼电机的执行动作,并分别控制折叠电机和光学传感模块的执行动作。
11、通过采用上述技术方案,无人机飞控系统主要基于主控电路板实现,主控电路板是基于无人机飞控芯片进行设置的,导航芯片和gps模块用于位置定位及飞行航迹的导航规划,光学传感模块用于执行航拍或侦查拍摄任务,电调模块主要是控制旋翼电机的执行动作,主要包括转速和功率等,多根电子增益天线是为了实现多方向上的通信,因此采用了屏蔽结构设置,因此采用多根电子增益天线来进行无线通信,在无线电静默时可以对多根电子增益天线进行断电,以减少电磁波的产生。
12、可选的,无人机飞控系统还包括陀螺仪、气压高度计和自启动芯片,所述陀螺仪、气压高度计和自启动芯片分别集成在主控电路板上,并分别与主控电路板通信连接,电池组通过单独的供电线路分别为陀螺仪、气压高度计和自启动芯片供电,自启动芯片根据陀螺仪和气压高度计测得的数据控制主控电路板重启,实现从静默滑行动作重启。
13、通过采用上述技术方案,在静默滑行动作持续时间内,主控电路板、导航芯片、gps模块、光学传感模块、电调模块和多根电子增益天线都会进行断电处理,那么如何恢复正常飞行就成了需要解决的技术问题,这时主要依靠陀螺仪和气压高度计为四旋翼无人机的姿态和飞行高度提供判断依据,自启动芯片判断如果满足相应调节,那么自启动芯片控制主控电路板恢复通电,进而主控电路板控制各电器件恢复供电,从而实现从静默滑行动作重启。
14、可选的,设机身组件的垂直方向厚度为b,在无人机飞控系统完成安装后,使机身组件的重心点位于架构几何中心点偏下0.5b-0.8b的中轴线上。
15、通过采用上述技术方案,通过机身组件的结构设置,以及各个电器件的重量及安装位置的设计,使机身组件的重心点位于架构几何中心点偏下0.5b-0.8b的中轴线上,优选控制使中心点位于几何中心点偏下0.8b的中轴线上,这样降低重心使飞行更加稳定,静默滑行动作时更容易保持稳定的滑行姿态。
16、可选的,所述光学传感模块是半球型摄像机。
17、通过采用上述技术方案,半球型摄像机可以实现拍摄角度的可控调整,就可以实现更大范围地侦查拍摄需求,当然还可以挂载超声波探测仪等侦查设备,也可以挂载照明等辅助侦查载荷。
18、可选的,无人机飞控系统控制四旋翼无人机实现空中旋翼展开及收拢动作的具体方法是:
19、主控电路板控制折叠电机的动力轴转动,驱动旋翼机臂从收纳槽中展开,实现空中旋翼展开及收拢动作。
20、通过采用上述技术方案,在空中投放应用场景下,需要对收拢状态的旋翼装置进行自动展开,在需要进行静默滑行动作时,需要对实现空中旋翼展开的收拢动作。
21、可选的,无人机飞控系统控制四旋翼无人机实现静默滑行动作的具体方法是:
22、主控电路板先通过电调模块控制旋翼电机执行高度和速度提升动作,通过气压高度计提供的海拔数据,主控电路板根据地形数据,监测到飞行提升到高于1000米,前进速度大于10米/秒,执行空中旋翼收拢动作,控制导航芯片、gps模块、光学传感模块、电调模块和多根电子增益天线断电,后主控电路板断电;
23、可选的,静默滑行动作持续期间,当自启动芯片根据气压高度计监测的海拔数据,配合离线地图数据,判断四旋翼无人机的飞行高度数据低于300米或陀螺仪监测到四旋翼无人机任意方向上的偏转角度大于45°时,自启动芯片执行退出静默滑行动作:开启主控电路板供电,主控电路板控制执行空中旋翼展开动作,控制导航芯片、gps模块、光学传感模块、电调模块和多根电子增益天线通电,恢复正常飞行和无线通信。
24、通过采用上述技术方案,在四旋翼无人机进入到有敌意的雷达侦查区域或为了躲避其它地面、空中侦查目标时,需要执行静默滑行动作,静默滑行动作的前提是一定的高度和前进速度,静默滑行动作持续时间内,高度会有一定的下降,由于存在较大的前进速度,高度下降速度并不会很快,因此静默滑行动作可持续时间一般大于30秒,那么就可以穿过大于300米的直线距离,理论上就可以穿过敏感区域,如果需要静默滑行动作持续的时间更长,那么就需要飞行到更高的高度,或者给予更大的前进速度。
25、综上所述,本发明包括以下至少一种有益技术效果:
26、本发明提供一种基于胶囊构型的四旋翼无人机,四旋翼无人机的机身组件基于胶囊状构型设置,整体呈管状,大大减小四旋翼无人机前进方向的风阻,可以实现高速飞行,配合电磁屏蔽涂层,极不容易被雷达等电子侦查手段发现,在机身组件的侧面置用于收纳四旋翼组件的收纳槽,并配合折叠电机,实现旋翼组件的自动收拢及展开,可以更好地应对空中投放场景,再配合无人机飞控系统的控制可以实现空中旋翼展开及收拢动作和静默滑行动作,可以通过滑行躲避电子侦查。
- 还没有人留言评论。精彩留言会获得点赞!