无人飞行器及其操作方法与流程
本发明涉及无人飞行器及其操作方法。
背景技术:
1、无人(unmanned)系统,也可以称为自主载具(autonomous vehicle),是能够在没有物理上存在的人类操作员的情况下行进的载具。无人系统可以以远程控制模式、自主模式或部分自主模式操作。
2、当无人系统以远程控制模式操作时,位于远程位置的飞行员或驾驶员可以通过经由无线链路发送到无人载具的命令来控制无人载具。当无人系统以自主模式操作时,无人系统通常基于预编程的导航航路点(waypoint)、动态自动化系统或这些的组合进行移动。此外,一些无人系统可以以远程控制模式和自主模式两者操作,并且在某些情况下可以同时这样做。例如,作为示例,远程飞行员或驾驶员可能希望在手动执行另一任务(诸如操作用于接载对象的机械系统)时将导航交托给自主系统。
3、存在用于各种不同环境的各种类型的无人系统。例如,无人飞行器(uav)被配置用于在空中操作(例如,飞行)。示例包括四旋翼飞机(quad-copters)和立式起落uav等等。还存在用于混合操作的无人系统,在混合操作中,多环境操作是可能的。混合无人载具的示例包括能够在陆地和水上进行操作的两栖船(amphibious craft)或能够在水上和陆地上降落的水上飞机。其他示例也是可能的。
技术实现思路
1、无人飞行器(uav)可用于将物品(诸如各种货物或食品)递送到接收者。在某些情况下,uav递送任务可以涉及将一个或多个物品运输到指定递送位置处的接收者以及还将一个或多个物品从递送位置运回两者。在这种场景下,经常会存在停机(down-time)时间,其中uav等待接收者提供要退还的一个或多个物品(等待退还用于消费递送的食品的可重复使用的器皿,或者等待接收者试穿递送的衣物)。这种停机时间可能会降低uav提供递送服务的效率,因为它会减少uav在给定时间量内能够完成的递送的数量。因此,示例实施例可以通过启动或请求启动递送位置处的接收者辅助的再充电过程来帮助在物品退还场景中更有效地利用uav停机时间,使得uav可以在这样的停机时间期间对其一个或多个电池再充电。
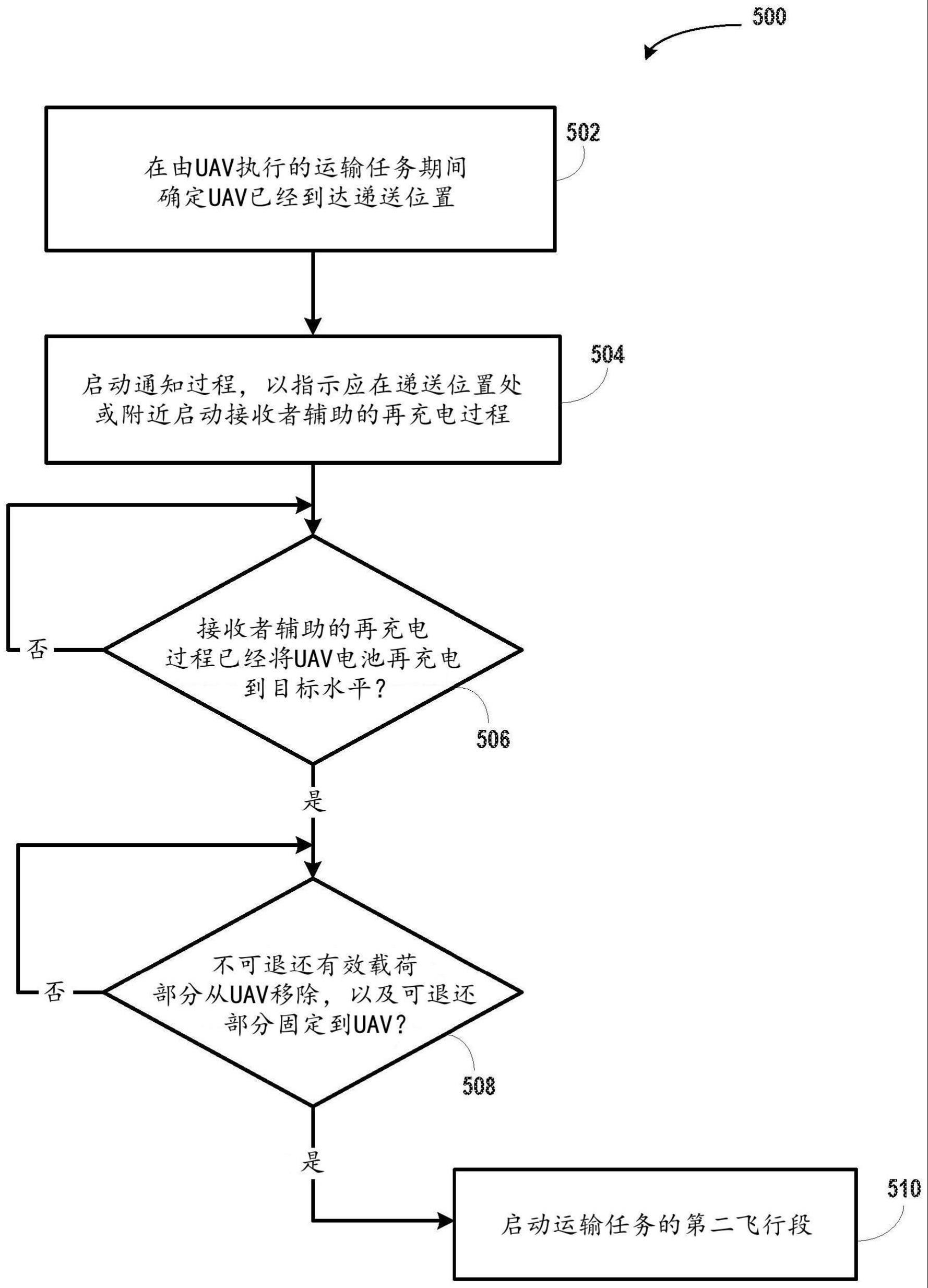
2、在一个方面,一种示例方法涉及:(a)在由uav执行运输任务期间,确定uav已经到达递送位置,其中,运输任务至少包括将有效载荷从装载位置运输到递送位置的第一飞行段(flight segment)、在递送位置处有效载荷的递送、以及从递送位置到下一位置的第二飞行段;(b)响应于确定uav已经到达递送位置,启动通知过程,该通知过程指示应在递送位置处或附近启动接收者辅助的再充电过程;以及(d)确定接收者辅助的再充电过程已经将uav的电池再充电到目标水平(level),并响应地:(i)确定何时有效载荷的不可退还部分已经从uav被移除以及有效载荷的可退还部分被耦接到uav或由uav保持;以及(ii)在不可退还部分被移除并且可退还部分被固定(secure)之后,启动运输任务的第二飞行段。
3、在另一方面,一种示例方法涉及:(a)在由uav执行运输任务期间,确定uav已经到达递送位置,其中,运输任务至少包括从源位置到用于递送有效载荷的递送位置的第一飞行段、以及从递送位置到下一位置的第二飞行段;(b)响应于确定uav已经降落在递送位置:(i)提供接口,用于经由uav的一个或多个接口组件来接收关于是否将在递送位置装载退还有效载荷的指示;以及(ii)启动通知过程,以指示应启动接收者辅助的再充电过程;(c)确定接收者辅助的再充电过程已经将uav的电池再充电到目标水平;(d)当接收到没有退还有效载荷将在递送位置被装载以及接收者辅助的再充电过程已将电池再充电到目标水平的指示时,启动第二飞行段;以及(d)当接收到退还有效载荷将在递送位置被装载以及接收者辅助的再充电过程已将电池再充电到目标水平的指示时:确定何时有效载荷的退还部分被装载到uav上或uav中,以及响应地启动第二飞行段。
4、在另一方面,一种飞行器包括:可再充电电池;电源接口,用于电耦接至外部ac电源;ac/dc转换器,耦接至电源接口并且可操作以将交流电流转换成直流电流;充电电路,可操作以使用来自ac/dc转换器的直流电流来对可再充电电池充电;以及一个或多个控制系统。该一个或多个控制系统可操作以:(i)使uav执行从装载位置到递送位置的第一飞行段,其中,第一飞行段是uav执行的运输任务的一部分;(ii)确定uav已经到达递送位置;(iii)响应于确定uav已经到达递送位置:(a)确定何时有效载荷的不可退还部分从有效载荷隔舱被移除以及有效载荷的可退还部分被固定到有效载荷隔舱或在有效载荷隔舱内;以及(b)启动通知过程,以指示应启动接收者辅助的再充电过程,其中,接收者辅助的再充电过程涉及将电源接口连接到递送位置处的外部ac电源;以及(iv)响应于(a)确定接收者辅助的再充电过程已将uav电池再充电到目标水平,以及(b)确定不可退还部分被移除以及可退还部分被固定,启动运输任务的第二飞行段。
5、在另一方面,一种无人飞行器的操作方法:确定无人飞行器在执行运输任务时已经到达递送位置,其中,所述运输任务至少包括将有效载荷从装载位置运输到递送位置的第一飞行段、在递送位置递送有效载荷、以及从递送位置到下一位置的第二飞行段;响应于确定无人飞行器已经到达递送位置,启动通知过程,请求接收者辅助的再充电过程,该过程包括无人飞行器与递送位置处或附近的电源的手动辅助的耦接;确定接收者辅助的再充电过程已经将无人飞行器的电池再充电到目标水平;基于确定接收者辅助的再充电过程已经将无人飞行器的电池再充电到目标水平,启动附加通知过程,该过程包括请求(i)无人飞行器与电源的手动辅助的断开,以及(ii)接收者辅助将无人飞行器放置在无人飞行器能够启动第二飞行段的位置;确定有效载荷的不可返回部分何时已经从无人飞行器移除,并且有效载荷的可返回部分何时耦接到无人飞行器或由无人飞行器保持;以及在不可退还部分被移除并且可退还部分被固定之后,启动运输任务的第二飞行段。
6、在另一方面,一种无人飞行器,包括:可充电电池;电源接口,用于电耦接到外部电源;充电电路,可操作以使用来自电源接口的电流对可充电电池充电;以及一个或多个控制系统,被配置为执行操作,包括:确定无人飞行器在执行运输任务时已经到达递送位置,其中,所述运输任务至少包括将有效载荷从装载位置运输到递送位置的第一飞行段、在递送位置递送有效载荷、以及从递送位置到下一位置的第二飞行段;响应于确定无人飞行器已经到达递送位置,启动通知过程,请求接收者辅助的再充电过程,该过程包括无人飞行器的电力接口与递送位置处或附近的电源的手动辅助的耦接;确定接收者辅助的再充电过程已经将无人飞行器的电池再充电到目标水平;基于确定接收者辅助的再充电过程已经将无人飞行器的电池再充电到目标水平,启动附加通知过程,该过程包括请求(i)无人飞行器与电源的手动辅助的断开,以及(ii)接收者辅助将无人飞行器放置在无人飞行器能够启动第二飞行段的位置;确定有效载荷的不可返回部分何时已经从无人飞行器移除,并且有效载荷的可返回部分何时耦接到无人飞行器或由无人飞行器保持;以及在不可退还部分被移除并且可退还部分被固定之后,启动运输任务的第二飞行段。
7、通过适当参考附图阅读以下详细描述,这些以及其他方面、优点和替选对于本领域普通技术人员而言将是清楚的。
- 还没有人留言评论。精彩留言会获得点赞!