一种基于并联机构的微重力模拟装置
本发明涉及一种微重力模拟装置,尤其是一种基于并联机构的微重力模拟装置,属于航天机械应用研究。
背景技术:
1、在航天飞行过程中,不可避免地会发生失重现象,因此在地面试验阶段,失重的影响是必须考虑到的环节。目前,空间微重力环境地面模拟方法主要有落塔法、抛物飞行法、水浮法、悬吊法、气悬浮法。
2、落塔法凭借物体从初始高度开始的自由落体,使其在自由落体运动阶段实现微重力状态[1,2,3]。通过落塔法实现失重模拟,其优点是:模拟精度高、试验设备具有较高的安全性、可重复性较好,并且可以在三维空间内进行失重模拟试验;其缺点是:微重力落塔整体结构造价高,试验舱尺寸限制了试验对象的体积与质量,难以达到较高的通用性,由于微重力落塔高度限制,所以只有10s左右的失重模拟试验时间,在大型空间设备模式试验方面受限。
3、抛物飞行法以失重飞机作为试验载体,当失重飞机按照抛物线轨迹进行飞行时,可以在机舱内实现一定程度的失重环境[4]。其优点是:微重力模拟的精度较高、试验设备即失重飞机的重复性好,可以在三维空间内进行微重力模拟试验;其缺点是:试验设备即失重飞机的造价比较昂贵,微重力模拟时间受飞机飞行高度影响,可模拟时间较短,被测试对象外形尺寸和重量受机舱尺寸限制。
4、水浮法是指将被测试物体置于水中,利用漂浮设备或者水产生的浮力达到抵消重力的效果,从而实现微重力模拟的一种方法[5]。其优点是:微重力模拟的时间不受条件限制,可以对具有较大尺寸和重量的空间设备进行模拟试验,同时可以在三维空间内进行微重力模拟试验;其缺点是:由于水存在着阻力与紊流现象,其测试精度难以较好保证。此外,空间设备无法直接置于水槽中进行试验,需做额外的防水封装处理以保证其密封性,会增加额外的维护成本。
5、悬吊法是通过绳索悬吊机构、附加滑轮组以及配重单元来补偿空间设备的重力,进而实现地面微重力模拟的一种方法[6,7],目前已经广泛应用于可展天线的地面试验。其优点是:悬吊系统的结构较为简单,实现较为容易,微重力模拟试验的时间不受条件限制,并且可以实现三维空间内的失重试验;其缺点是:用于固定绳索顶端的桁架,其结构会随着航天器飞行轨迹的复杂而复杂化,同时桁架随动的导轨机构运动摩擦磨损会影响悬吊法的试验精度。
6、气悬浮法是通过高压产生的气流在气浮平台上产生气膜,托起被测试对象,进而抵消重力,实现微重力模拟的一种方法[8,9]。其优点是:气悬浮装置的研发制造成本相比其他方法较低,设备与平台间的摩擦力较小进而可以达到较高的模拟精度,微重力模拟时间不受条件限制,可以实现大体积与高负载的微重力模拟;其缺点为:微重力模拟只限于二维平面,三维空间的气悬浮模拟技术尚不成熟。
7、上述五种现有方法虽然都可以进行微重力模拟,但是都属于全物理仿真,即模拟系统可以达到的精度完全取决于系统本身的参数,如若想进行修改则需要更改系统的结构或材料,实现较为复杂。因此,如何建立结构参数可变的柔性模拟系统,如何在准确而全面地反映力与位移映射关系的基础上设计微重力模拟系统,如何在兼顾可维护性、可重复使用性、可进行三维空间模拟、无模拟试验时间限制和高模拟精度等特点的前提下设计微重力模拟装置,是目前亟待解决的问题。
8、[1]田大可,范小东,郑夕健,等.空间可展开天线微重力环境模拟研究现状与展望[j].机械工程学报,2021,57(03):11-25.
9、[2]kufner e,blum j,callens n,et al.esa's drop tower utilisationactivities 2000to 2011[j].microgravity science and technology,2011,23(4):409-25.
10、[3]张孝谦,袁龙根,吴文东,等.国家微重力实验室百米落塔实验设施的几项关键技术[j].中国科学e辑:工程科学材料科学,2005,(05):523-34.
11、[4]block j,bager a,behrens j,et al.a self-deploying and self-stabilizing helical antenna for small satellites[j].acta astronaut,2013,86:88-94.
12、[5]sun,c.,chen,s.,yuan,j.,zhu,z.:a six-dof buoyancy tank microgravitytest bed with active drag compensations[j].microgravity scienceandtechnology.2017,29(5):391-402.
13、[6]张加波,王辉,李云,等.基于真空负压吸附的太阳翼重力卸载技术[j].机械工程学报,2020,56(05):202-10.
14、[7]彭浩,何柏岩.星载环形天线重力补偿新方法[j].中国机械工程,2019,30(04):379-84.
15、[8]rybus t,seweryn k,oles j,et al.application ofaplanar air-bearingmicrogravity simulator for demonstration of operations required for anorbital capture with amanipulator[j].actaastronaut,2019,155:211-29.
16、[9]杨国永,王洪光,姜勇,等.气浮试验台重力卸载精度分析[j].机械工程学报,2019,55(05):1-10.
技术实现思路
1、鉴于现有微重力模拟方法存在的问题,难以满足空间模块对接过程中的模拟需求,本发明提供一种基于并联机构的微重力模拟装置,它针对空间模块对接过程搭建了基于stewart并联结构的地面微重力模拟装置,能够迅速而准确地做出随动反应来模拟失重动作,具有结构参数可调、可维护、可重复使用、可进行三维空间模拟、无模拟试验时间限制和模拟精度高的特点。
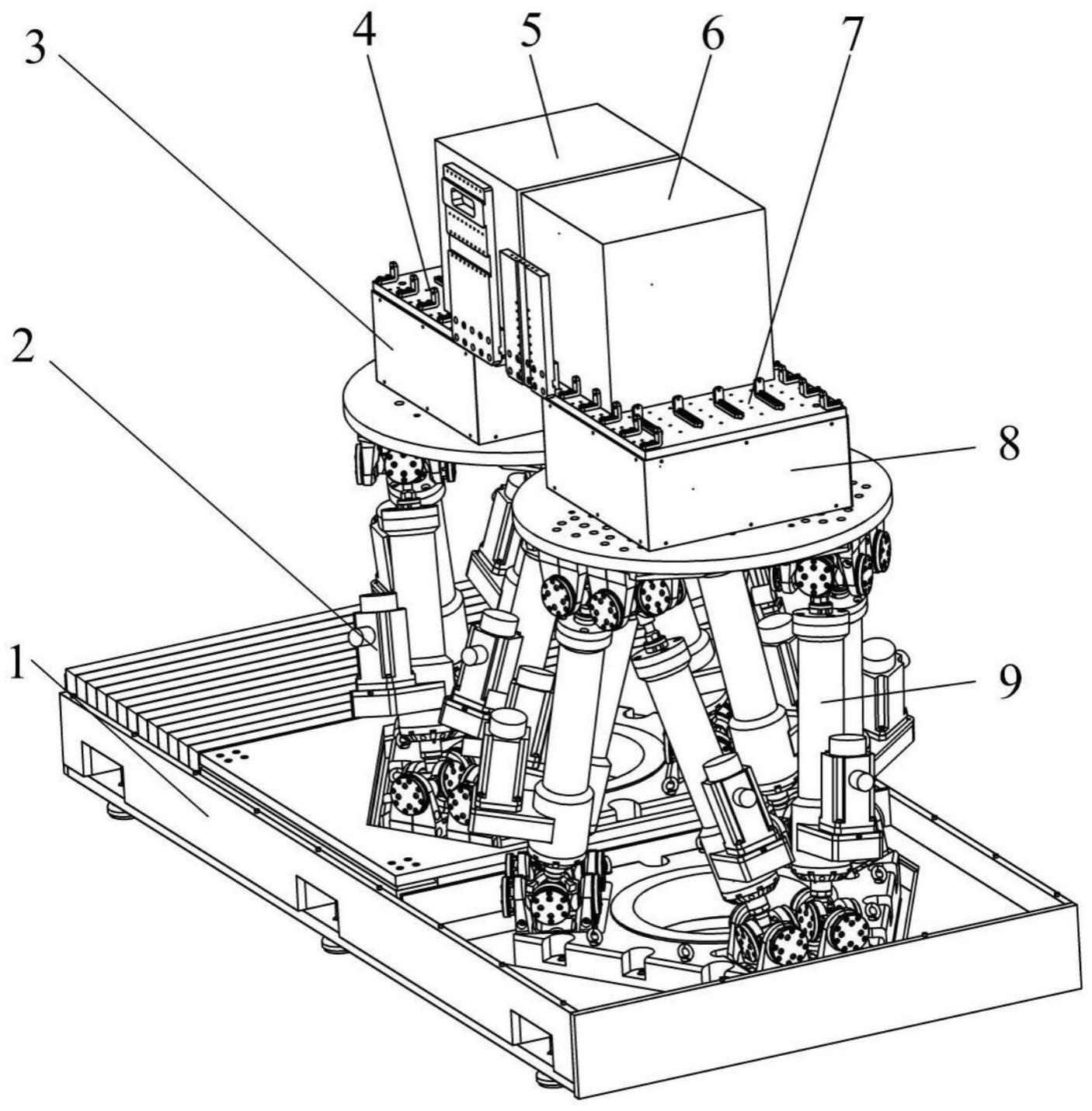
2、为实现上述目的,本发明采取下述技术方案:一种基于并联机构的微重力模拟装置,包括底座、主动侧运动台、主动侧六维力传感器、主动侧固定工装、主动侧对接模块、从动侧对接模块、从动侧固定工装、从动侧六维力传感器以及从动侧运动台;所述底座包括固定底板和安装在其表面一端通过丝杠电机控制能够前后平移的移动平台,所述移动平台表面固定安装主动侧运动台,所述固定底板表面相对端固定安装从动侧运动台,所述从动侧运动台基于stewart并联结构设计,包括上平台和下平台以及铰接于二者之间边缘的六根电动伸缩杆,所述电动伸缩杆以伺服电机为动力源且中间设置减速器进行传动连接,所述主动侧运动台与从动侧运动台具有相同的结构,所述主动侧六维力传感器固定在主动侧运动台上表面,所述从动侧六维力传感器固定在从动侧运动台上表面,所述主动侧固定工装安装在主动侧六维力传感器上表面用于主动侧对接模块的夹装定位,所述从动侧固定工装安装在从动侧六维力传感器上表面用于从动侧对接模块的夹装定位,所述主动侧对接模块对接侧设置的主动接口通过锁紧钩能够对所述从动侧对接模块对接侧设置的从动接口拉近并进行锁紧,微重力模拟过程中主动侧运动台用于提供对接的目标位置并释放对接信号,从动侧运动台检测到对接信号时通过从动侧六维力传感器对从动侧对接模块的受力进行采集,通过控制系统解算处理得到六维外力,并通过坐标变换与动力学解算实现在从动侧运动台六维方向上的映射,通过控制系统逆解得到各电动伸缩杆的伸缩量与伸缩速度实现微重力模拟。
3、与现有技术相比,本发明的有益效果是:本发明针对空间模块对接过程搭建了基于stewart并联结构的地面微重力模拟装置,用于检测空间模块在对接过程中的受力状况,能够迅速而准确地做出随动反应来模拟失重动作,由于在空间失重状态下,模块在锁紧过程中会发生碰撞,但普通对接试验难以模仿空间对接的真实状态,从而会导致真实对接过程中接口的损坏以及性能的损伤,本发明的微重力模拟装置有效地弥补了传统微重力模拟技术试验准备时间长和失重时间短等弊端,具有结构参数可调(可实现零重力的完全重力补偿)、可维护、可重复使用、可进行三维空间模拟、无模拟试验时间限制和模拟精度高的特点,对未来可重构模块化空间结构的设计以及新型失重模拟试验具有重要的意义。
- 还没有人留言评论。精彩留言会获得点赞!