一种无人机气动弹射起飞控制方法、系统、介质及设备与流程
本发明属于无人机弹射,具体涉及一种无人机气动弹射起飞控制方法、系统、介质及设备。
背景技术:
1、零长发射在无人机起飞方式中具有较大的优势,其中,火箭助推和气动弹射两种方式广泛应用于需要零长发射的无人机发射方案中。
2、火箭助推方式的无人机,在起飞阶段会产生声光延误等污染,从而暴露无人机弹射位置及弹射规格,使作战能力大大削弱,为此,气动弹射在无人机弹射应用中具有一定的优势。
3、针对无人机的气动弹射技术,目前大多关注于气动弹射系统以及基于气动弹射系统的控制方法,例如专利文献cn114524107a中公开的一种基于无杆气缸真空差压无人机气动弹射系统及弹射方法,对气动弹射系统所采用的结构以及控制方法说明。但目前还鲜有关于对无人机气动弹射起飞阶段的控制的相关研究,而无人机气动弹射起飞阶段的控制对无人机的平稳起飞起着重要的作用。
技术实现思路
1、本发明的目的在于提供一种无人机气动弹射起飞控制方法、系统、介质及设备,以实现对无人机在气动弹射起飞阶段进行控制,保证无人机在气动弹射时能够平稳起飞。
2、本发明通过下述技术方案实现:
3、一种无人机气动弹射起飞控制方法,在无人机弹射起飞阶段对无人机进行控制,包括以下步骤:
4、获取无人机在弹射起飞阶段的飞行状态参数;
5、根据无人机在弹射起飞段的升降舵通道、副翼通道、方向舵通道、油门通道的控制律,解算得到无人机的升降舵指令值、副翼舵指令值、方向舵指令值和油门指令值,对无人机进行控制。
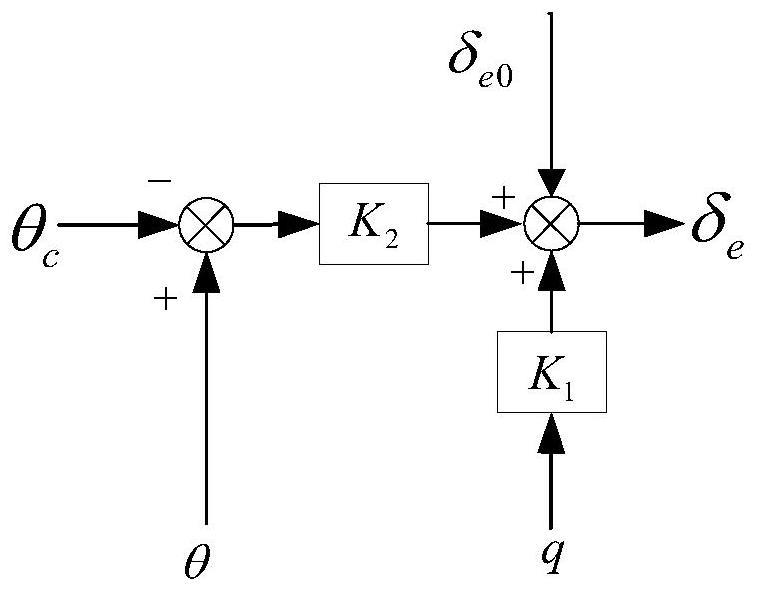
6、进一步的,设置升降舵预置量,并基于升降舵预置量、俯仰角速率、俯仰角和俯仰角指令值构建升降舵通道的控制律;
7、根据升降舵通道的控制律解算得到升降舵指令值。
8、进一步的,基于无人机滚转角速率、滚转角、滚转角指令值构建副翼通道的控制律,其中无人机滚转角指令值由基于侧偏距变化率、侧偏距指令值变化率、无人机航迹角和航迹角指令值所构建的滚转角指令的控制律得到,侧偏距指令值变化率由基于侧偏距和侧偏距指令值所构建的侧偏距指令值变化率的控制律得到;
9、根据副翼通道的控制律解算得到副翼舵指令值。
10、进一步的,基于无人机滚转角速率构建方向舵通道的控制律;
11、根据方向舵通道的控制律解算得到方向舵指令值。
12、进一步的,油门通道的控制律被设置为解算得到的发动机油门值为无人机发动机的最大油门或使无人机能够达到设定的推重比。
13、进一步的,在构建升降舵控制律时,对无人机俯仰角速率进行低通滤波处理。
14、进一步的,在构建副翼通道的控制律时,对无人机滚转角速率进行低通滤波处理。
15、进一步的,在构建方向舵通道的控制律时,对无人机滚转角速率进行低通滤波处理。
16、进一步的,在构建副翼通道的控制律时,对无人机滚转角指令值进行限幅处理,使无人机在第一设定高度以内时,外环控制律不接入控制,在无人机相对高度大于第一设定高度并在第二设定高度内时,滚转角指令值从零开始逐渐增加,在无人机相对高度大于第二设定高度时,滚转角指令值的限幅值与航行段限幅值相同;
17、外环控制律为与滚转角指令值和侧偏距指令值变化率相对应的控制律。
18、无人机气动弹射起飞控制系统,包括:
19、参数获取单元,用于获取无人机弹射起飞时的飞行参数;
20、控制律解算单元,用于根据升降舵通道、副翼通道、方向舵通道和油门通道的控制律分别解算无人机在气动弹射起飞时各个模块的指令值;
21、和/或,低通滤波处理单元,用于在构建升降舵控制律、副翼通道控制律、方向舵通道控制律时,对无人机俯仰角速率、滚转角速率进行低通滤波处理;
22、和/或,限幅处理单元,用于在构建副翼通道控制律时,对无人机滚转角指令值进行限幅处理;
23、控制单元,根据解算得到升降舵指令值、副翼舵指令值、方向舵指令值和油门指令值,对无人机进行控制。
24、一种计算机可读存储介质,储存有计算机程序,计算机程序被处理器加载执行时,实现上述的无人机气动弹射起飞控制方法。
25、一种电子设备,包括处理器及存储器,其中,
26、存储器用于存储计算机程序;
27、处理器用于加载执行所述计算机程序,以使电子设备执行上述的无人机气动弹射起飞控制方法。
28、本发明与现有技术相比,具有以下优点及有益效果:
29、1)本发明通过构建升降舵通道、副翼通道、方向舵通道、油门通道的控制律,结合无人机气动弹射起飞阶段的飞行状态参数,来获取无人机在起飞阶段的升降舵、副翼舵、方向舵和油门控制指令,从而实现对无人机在起飞阶段的飞行控制,能够保证无人机气动弹射的平稳起飞。
30、2)本发明中基于预置升降舵、俯仰角阻尼和俯仰角比例控制的方式构建升降舵通道、副翼通道、方向舵通道的控制律,能够有效提高各通道控制指令的解算精度,使无人机在脱离弹射轨道后能够基于对无人机的主动控制实现无人机的安全平稳爬升。
31、3)本发明在升降舵通道、副翼通道、方向舵通道的控制律中,通过对相应的控制项进行低通滤波处理,以降低气动弹射过程中弹射轨道对无人机所产生的角速率高频扰动,提高对无人机的控制精度。
32、4)本发明针对副翼通道的控制,采用基于侧偏距的控制方式,并通过滚转角指令的限幅处理,使无人机在横侧向控制上更加平稳,以避免控制律在转为侧偏距控制时产生较大的波动而影响控制精度。
技术特征:
1.一种无人机气动弹射起飞控制方法,其特征在于,在无人机弹射起飞阶段对无人机进行控制,包括以下步骤:
2.根据权利要求1所述的无人机气动弹射起飞控制方法,其特征在于,设置升降舵预置量,并基于升降舵预置量、俯仰角速率、俯仰角和俯仰角指令值构建升降舵通道的控制律;
3.根据权利要求1所述的无人机气动弹射起飞控制方法,其特征在于,基于无人机滚转角速率、滚转角、滚转角指令值构建副翼通道的控制律,其中无人机滚转角指令值由基于侧偏距变化率、侧偏距指令值变化率、无人机航迹角和航迹角指令值所构建的滚转角指令的控制律得到,侧偏距指令值变化率由基于侧偏距和侧偏距指令值所构建的侧偏距指令值变化率的控制律得到;
4.根据权利要求1所述的无人机气动弹射起飞控制方法,其特征在于,基于无人机滚转角速率构建方向舵通道的控制律;
5.根据权利要求1所述的无人机气动弹射起飞控制方法,其特征在于,油门通道的控制律被设置为解算得到的发动机油门值为无人机发动机的最大油门或使无人机能够达到设定的推重比。
6.根据权利要求2所述的无人机气动弹射起飞控制方法,其特征在于,在构建升降舵控制律时,对无人机俯仰角速率进行低通滤波处理。
7.根据权利要求3所述的无人机气动弹射起飞控制方法,其特征在于,在构建副翼通道的控制律时,对无人机滚转角速率进行低通滤波处理。
8.根据权利要求4所述的无人机气动弹射起飞控制方法,其特征在于,在构建方向舵通道的控制律时,对无人机滚转角速率进行低通滤波处理。
9.根据权利要求3或7所述的无人机气动弹射起飞控制方法,其特征在于,在构建副翼通道的控制律时,对无人机滚转角指令值进行限幅处理,使无人机在第一设定高度以内时,外环控制律不接入控制,在无人机相对高度大于第一设定高度并在第二设定高度内时,滚转角指令值从零开始逐渐增加,在无人机相对高度大于第二设定高度时,滚转角指令值的限幅值与航行段限幅值相同;
10.无人机气动弹射起飞控制系统,包括:
11.一种计算机可读存储介质,储存有计算机程序,所述计算机程序被处理器加载执行时,实现如权利要求1-9所述的无人机气动弹射起飞控制方法。
12.一种电子设备,包括处理器及存储器,其中,
技术总结
本发明公开了一种无人机气动弹射起飞控制方法、系统、介质及设备,在无人机弹射起飞阶段对无人机进行控制,包括以下步骤:获取无人机在弹射起飞阶段的飞行状态参数;根据无人机在弹射起飞段的升降舵通道、副翼通道、方向舵通道、油门通道的控制律,解算得到无人机的升降舵指令值、副翼舵指令值、方向舵指令值和油门指令值,对无人机进行控制。本发明通过构建升降舵通道、副翼通道、方向舵通道、油门通道的控制律,结合无人机气动弹射起飞阶段的飞行状态参数,来获取无人机在起飞阶段的升降舵、副翼舵、方向舵和油门控制指令,从而实现对无人机在起飞阶段的飞行控制,能够保证无人机气动弹射的平稳起飞。
技术研发人员:王庆琥,金涛,王毅,任杰,李静洪,王振东,唐瑞卿,刘宇佳,韩婵,杜津铭,刘明辉
受保护的技术使用者:成都飞机工业(集团)有限责任公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!