电推进卫星的轨道机动方向估计方法、装置和存储介质与流程
本发明涉及卫星测控,涉及一种电推进卫星的轨道机动方向估计方法、装置和存储介质,特别是涉及一种适用于电推进卫星的轨道机动方向估计方法、装置和存储介质。
背景技术:
1、卫星(也可以称为航天器)的轨道机动控制在航天活动中非常常见,如低轨卫星的高度保持、星座的相位保持、地球静止卫星的位置保持等均是依靠推进系统,通过卫星的轨道机动控制实现的。在非机动卫星轨道算法中,观测量中主要反馈卫星动力学模型预测初值偏差,而对轨道机动卫星进行轨道确定,由于推力加速度的量级高于或等于其他摄动力的误差量级,观测量主要反映卫星机动过程中的动力学模型误差。
2、卫星电推进技术是一种先进的推进技术,目前已发展出混合电推进、霍尔电推进、离子电推进等多项技术,主要应用于飞行器、超低轨道卫星、深空探测器等多类航空器,其通过能源转化的方式由电推进系统产生推力。相比于其他推进技术,电推进技术的比冲高、推力小、寿命长,可以使航天器的运转更高速、更长期可靠,同时可克服较小的阻力,满足新型航天任务的需求。
3、目前使用电推进卫星的占比正在逐渐增加,截至2021年初,使用电推进系统的卫星约占所有发射的卫星的10%左右。随着电推进技术的不断改进和成本的降低,预计电推进卫星的使用率将会逐渐增加。目前大型星座卫星,均是使用电推进器作为卫星的推进系统。
4、在卫星编队、轨道捕获等轨道控制中,对控制精度要求很高,当卫星推进器系统中推进器的推力方向精度若达不到要求的精度,则会造成卫星推进器系统中推进器的推力方向与预估的方向产生偏差,导致轨道控制存在耦合,影响卫星推进器系统的卫星轨道机动精度。
5、因此,亟需开发一种电推进卫星的轨道机动方向估计方法、装置和存储介质,具体是一种适用于电推进卫星的轨道机动方向估计方法、装置和存储介质,能够提高卫星推进器系统中推进器的推力方向精度,避免卫星推进器系统中推进器的推力方向与预估的方向产生偏差而导致轨道控制存在耦合,从而提高卫星推进器系统的卫星轨道机动精度。
技术实现思路
1、本发明的目的是提供一种电推进卫星的轨道机动方向估计方法、装置和存储介质,提高卫星推进器系统中推进器的推力方向精度,避免卫星推进器系统中推进器的推力方向与预估的方向产生偏差而导致轨道控制存在耦合,从而提高卫星推进器系统的卫星轨道机动精度。
2、为解决上述技术问题,作为本发明的一个方面,提供了一种电推进卫星的轨道机动方向估计方法,包括如下步骤:
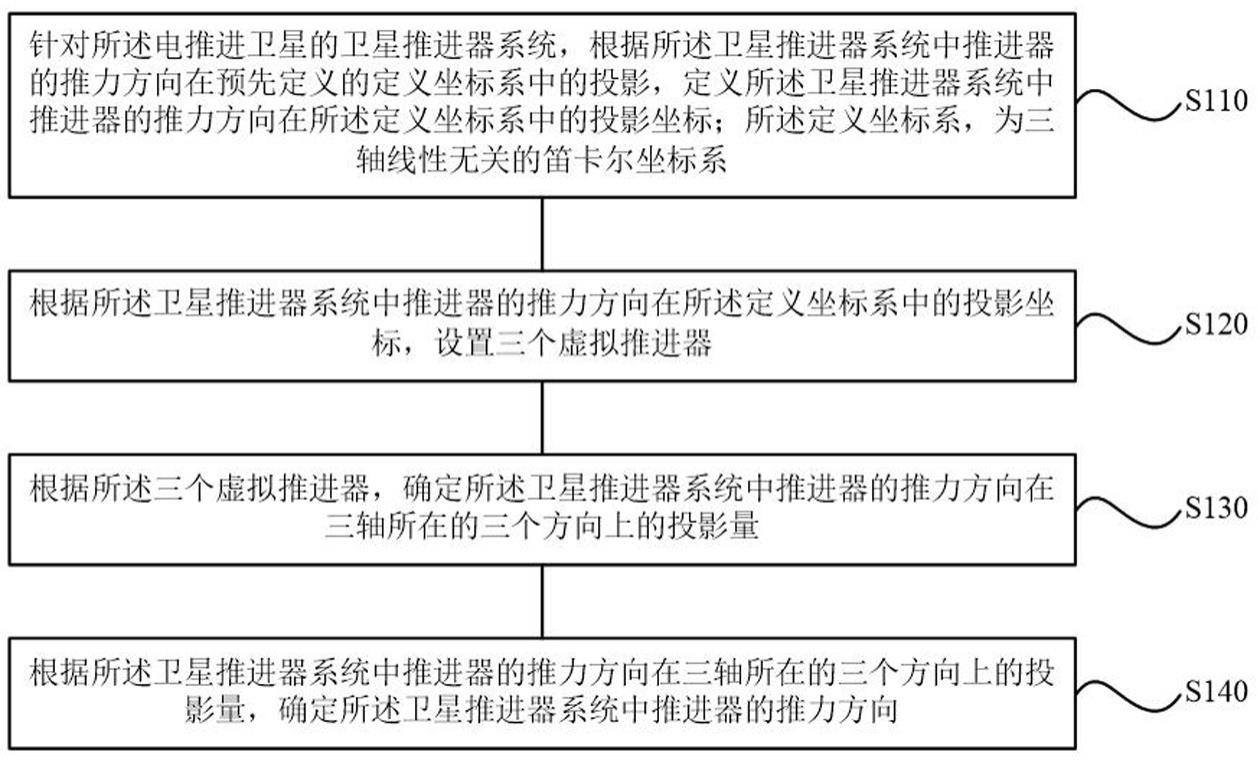
3、针对所述电推进卫星的卫星推进器系统,根据所述卫星推进器系统中推进器的推力方向在预先定义的定义坐标系中的投影,定义所述卫星推进器系统中推进器的推力方向在所述定义坐标系中的投影坐标;所述定义坐标系,为三轴线性无关的笛卡尔坐标系;
4、根据所述卫星推进器系统中推进器的推力方向在所述定义坐标系中的投影坐标,设置三个虚拟推进器;
5、根据所述三个虚拟推进器,确定所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量;
6、根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,确定所述卫星推进器系统中推进器的推力方向。
7、根据本发明一示例实施方式,定义的所述卫星推进器系统中推进器的推力方向在所述定义坐标系中的投影坐标,为:;
8、其中,表示推力的矢量,也就是推力在所述定义坐标系下的方向;表示所述卫星推进器系统中推进器的推力方向在所述定义坐标系的x、y、z三个方向上的投影量。
9、根据本发明一示例实施方式,根据所述卫星推进器系统中推进器的推力方向在所述定义坐标系中的投影坐标,设置三个虚拟推进器,包括:
10、根据所述卫星推进器系统中推进器的推力方向在所述定义坐标系中的投影坐标,设置所述三个虚拟推进器的推力方向分别为、和;设置所述三个虚拟推进器的理论推力大小为;以及,设置所述三个虚拟推进器的推力初值分别为、和。
11、根据本发明一示例实施方式,根据所述三个虚拟推进器,确定所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,包括:
12、根据设置的所述三个虚拟推进器的推力方向分别为、和,所述三个虚拟推进器的理论推力大小为,以及所述三个虚拟推进器的推力初值分别为、和,使用预先设定的卫星机动轨道确定算法,确定所述三个虚拟推进器的推力值、和,作为所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量。
13、根据本发明一示例实施方式,根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,确定所述卫星推进器系统中推进器的推力方向,包括:
14、根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,确定所述卫星推进器系统中推进器的推力大小;
15、根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量、以及所述卫星推进器系统中推进器的推力大小,确定所述卫星推进器系统中推进器的推力方向。
16、根据本发明一示例实施方式,根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,确定所述卫星推进器系统中推进器的推力大小,包括:
17、根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,按以下的公式,确定所述卫星推进器系统中推进器的推力大小为:
18、;
19、其中,表示所述卫星推进器系统中推进器的推力大小,、和表示所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量。
20、根据本发明一示例实施方式,根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量、以及所述卫星推进器系统中推进器的推力大小,确定所述卫星推进器系统中推进器的推力方向,包括:
21、根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量、以及所述卫星推进器系统中推进器的推力大小,按以下的公式,确定所述卫星推进器系统中推进器的推力方向为:
22、;
23、;
24、;
25、其中,表示所述卫星推进器系统中推进器的推力大小,、和表示所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,表示所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的分量。
26、作为本发明的第二个方面,本发明提供一种电推进卫星的轨道机动方向估计装置,包括:
27、定义单元,被配置为针对所述电推进卫星的卫星推进器系统,根据所述卫星推进器系统中推进器的推力方向在预先定义的定义坐标系中的投影,定义所述卫星推进器系统中推进器的推力方向在所述定义坐标系中的投影坐标;所述定义坐标系,为三轴线性无关的笛卡尔坐标系;
28、计算单元,被配置为根据所述卫星推进器系统中推进器的推力方向在所述定义坐标系中的投影坐标,设置三个虚拟推进器;
29、所述计算单元,还被配置为根据所述三个虚拟推进器,确定所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量;
30、所述计算单元,还被配置为根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,确定所述卫星推进器系统中推进器的推力方向。
31、根据本发明一示例实施方式,所述定义单元,定义的所述卫星推进器系统中推进器的推力方向在所述定义坐标系中的投影坐标,为:;
32、其中,表示推力的矢量,也就是推力在所述定义坐标系下的方向;表示所述卫星推进器系统中推进器的推力方向在所述定义坐标系的x、y、z三个方向上的投影量。
33、根据本发明一示例实施方式,所述计算单元,根据所述卫星推进器系统中推进器的推力方向在所述定义坐标系中的投影坐标,设置三个虚拟推进器,包括:
34、根据所述卫星推进器系统中推进器的推力方向在所述定义坐标系中的投影坐标,设置所述三个虚拟推进器的推力方向分别为、和;设置所述三个虚拟推进器的理论推力大小为;以及,设置所述三个虚拟推进器的推力初值分别为、和。
35、根据本发明一示例实施方式,所述计算单元,根据所述三个虚拟推进器,确定所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,包括:
36、根据设置的所述三个虚拟推进器的推力方向分别为、和,所述三个虚拟推进器的理论推力大小为,以及所述三个虚拟推进器的推力初值分别为、和,使用预先设定的卫星机动轨道确定算法,确定所述三个虚拟推进器的推力值、和,作为所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量。
37、根据本发明一示例实施方式,所述计算单元,根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,确定所述卫星推进器系统中推进器的推力方向,包括:
38、根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,确定所述卫星推进器系统中推进器的推力大小;
39、根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量、以及所述卫星推进器系统中推进器的推力大小,确定所述卫星推进器系统中推进器的推力方向。
40、根据本发明一示例实施方式,所述计算单元,根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,确定所述卫星推进器系统中推进器的推力大小,包括:
41、根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,按以下的公式,确定所述卫星推进器系统中推进器的推力大小为:
42、;
43、其中,表示所述卫星推进器系统中推进器的推力大小,、和表示所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量。
44、根据本发明一示例实施方式,所述计算单元,根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量、以及所述卫星推进器系统中推进器的推力大小,确定所述卫星推进器系统中推进器的推力方向,包括:
45、根据所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量、以及所述卫星推进器系统中推进器的推力大小,按以下的公式,确定所述卫星推进器系统中推进器的推力方向为:
46、;
47、;
48、;
49、其中,表示所述卫星推进器系统中推进器的推力大小,、和表示所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的投影量,表示所述卫星推进器系统中推进器的推力方向在三轴所在的三个方向上的分量。
50、作为本发明的第二个方面,本发明提供一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行以上所述的电推进卫星的轨道机动方向估计方法。
51、本发明的有益效果是:
52、本发明的方法通过定义卫星推进器系统中推进器的推力方向在定义坐标系的投影,设置三个虚拟推进器,并求解三个虚拟推进器的推力值;根据三个虚拟推进器的推力值,确定卫星推进器系统的实际轨控的推力方向和推力方向,从而提高卫星推进器系统中推进器的推力方向精度,避免卫星推进器系统中推进器的推力方向与预估的方向产生偏差而导致轨道控制存在耦合,从而提高卫星推进器系统的卫星轨道机动精度。
- 还没有人留言评论。精彩留言会获得点赞!