一种可稳定柔顺着陆的黏附机器人
本发明涉及机器人,具体涉及一种可稳定柔顺着陆的黏附机器人。
背景技术:
1、近几十年来,随着航天技术的迅速发展,人类的活动在太空环境中不断扩展。在轨服务作为航天任务的重要分支之一,主要包括辅助航天员活动、在轨维护和在轨装配等,其中在轨维护方面,能够实现空间机器人在目标航天器上进行在轨检测和维修任务亟需发展。目前,现有的大多数航天器并非专门为对接或捕获而设计,且目标航天器和空间机器人均处于空间零重力或微重力的漂浮状态,这使得具有一定相对速度的空间机器人柔顺地着陆在目标航天器上,成为一项极具意义和挑战的任务。
2、一般针对目标航天器着陆黏附的空间机器人,其着陆缓冲系统性能和稳定黏附能力是关键。目前逐渐出现了一些干黏附式的空间机器人设计,例如中国公开专利申请(cn202011061468.3),如图1所示,该机器人设计了4个四自由度单腿和四个小尺寸力传感一体化黏附脚掌,四个四自由度单腿分为两两一组布置在机身的前后两端的侧面上;主控制板、分控制板和大容量锂电池都设置在机身上,主控制板与分控制板电连接,大容量锂电池供电,四个小尺寸力传感一体化黏附脚掌分别设置在四个四自由度单腿的末端。优点:该发明的机器人四自由度单腿通过各驱动电机地的合理布局,加大了肩关节抬起下落的范围,使其可以自由调节机身高度;一体化黏附脚掌,利用仿生干黏附材料发挥最好地黏附性能,实现小尺寸脚掌产生大的黏附力,获得支撑大质量机器人和大负载的能力。
3、但是上述发明以及目前其他公开的技术中所设计的基于干黏附的空间机器人,不适用于空间微重力环境中,其具有一定相对于目标航天器的初速度的黏附着陆情况,在具有一定初速度的碰撞黏附过程中,不仅对机器人的腿部结构有较高的稳定性要求,而且需要抑制碰撞对目标航天器产生的较大扰动,避免出现碰撞力过大而反弹的黏附失败情况发生;干黏附材料产生稳定黏附力的关键条件之一是干黏附材料与目标表面的贴合度,目前的其他公开发明大多采用被动关节和柔性层结合的自适应方案,因而刚度不可调整,在碰撞黏附过程中,无法与不平整的接触目标面的进行贴合,导致黏附稳定性差,且适应性有限。
技术实现思路
1、本发明的目的在于提供一种可稳定柔顺着陆的黏附机器人,以解决现有黏附机器人在空间微重力环境中无法柔顺着陆以及黏附稳定性差的问题。
2、本发明解决上述技术问题的技术方案如下:
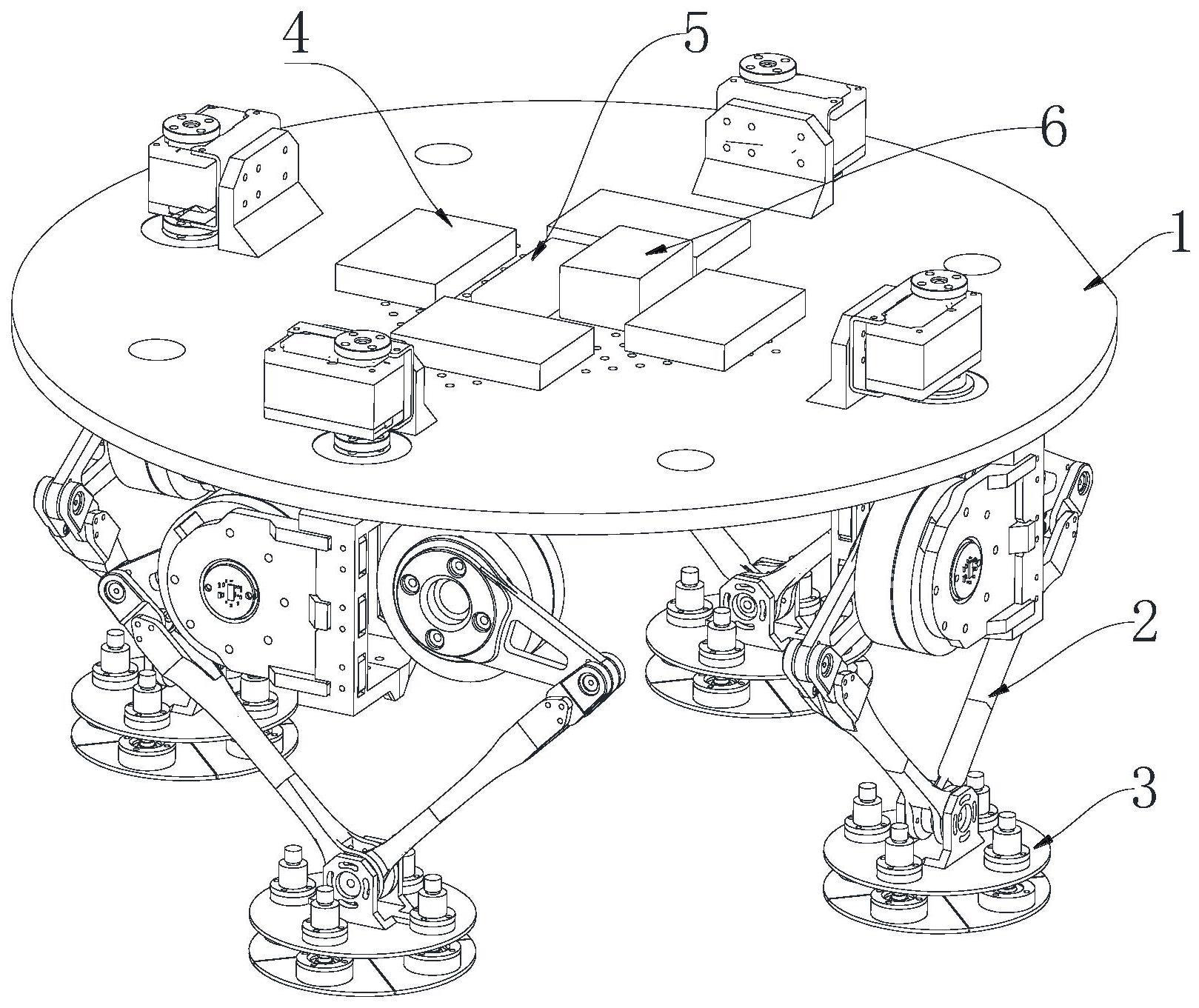
3、一种可稳定柔顺着陆的黏附机器人,包括:机身、若干设置在机身底侧的三自由度单腿、设置在三自由度单腿末端的黏附脚掌以及分别设置在机身上的单腿分控器、主控器和动力电池,三自由度单腿与黏附脚掌和单腿分控器一一对应;
4、动力电池分别与三自由度单腿、黏附脚掌、单腿分控器和主控器电性连接,单腿分控器分别与主控器和对应的三自由度单腿通信连接;
5、单腿分控器根据主控器的指令使三自由度单腿和黏附脚掌运动,实现机器人的行走和缓冲着陆。
6、本发明的黏附脚掌和三自由度单腿分别与单腿分控器通信连接,单腿分控器根据三自由度单腿的反馈信息进行分析,再由主控器进行分析并对单腿分控器发送指令信息,进而实现三自由度单腿和黏附脚掌的稳定行走、柔顺缓冲着陆,同时黏附脚掌可适用于不平整接触目标面的黏附,使得机器人能够在不平目标面上行走,同时可在不平整的目标面上柔顺着陆;本发明的黏附脚掌在单腿分控器的作用下作为一级缓冲机构,三自由度单腿作为刚度和阻尼均可调整的二级缓冲机构,其共同作用以提高机器人与目标航天器的黏附成功率和稳定性,并有效降低对目标航天器的扰动。
7、进一步地,黏附脚掌包括脚掌上板、位于脚掌上板下方的脚掌下板、设置在脚掌上板上的多个推动件以及设置在脚掌上板上且与三自由度单腿的末端配合连接的连接座,推动件与单腿分控器通信连接;
8、脚掌下板由多个角度相同的扇形板周向排布而成,推动件的数量与扇形板的数量相同,推动件的输出端与对应的扇形板活动连接,且每个扇形板的底部均粘接有多个黏附件。
9、进一步地,每个扇形板上均设置有关节轴承,推动件的输出端与关节轴承活动连接。
10、进一步地,黏附件的厚度为1.5至2.5mm,黏附件呈圆形结构且半径为2至15mm。
11、本发明的脚掌上板上的推动件与脚掌下板上的关节轴承活动连接,且脚掌下板由多个扇形板组成,当接触目标面不平整时,可通过推动件和扇形板对不平整的接触目标面进行接触,再通过扇形板底部的黏附件进行黏附;黏附件成功黏附后作为固定端,在推动件的作用下使得脚掌上板可在一定范围的倾斜角度内活动,形成对接触表面的自适应性,进而可确保黏附件与目标表面的稳定黏附,便于不平整目标面的柔顺缓冲着陆和稳定行走。
12、进一步地,三自由度单腿包括设置在机身上的驱动件、位于机身底部的z型架、设置在z型架的两侧的腿连杆驱动件、与腿连杆驱动件的输出端配合连接的腿连杆组件、以及设置在z型架的两侧且用于检测腿连杆驱动件转轴的旋转角度的角度传感器,驱动件的输出端穿过机身并与z型架连接,腿连杆组件的末端与连接座配合连接,驱动件、腿连杆驱动件以及角度传感器分别与单腿分控器通信连接。
13、本发明的驱动件在单腿分控器的驱动下可调整三自由度单腿的方向,角度传感器用于采集腿连杆驱动件转轴的旋转角度,进而可确定腿连杆组件中第一和第二大腿连杆的旋转角度,再将角度信息反馈给单腿分控器,单腿分控器将角度信息分析并反馈给主控器,再由主控器对单腿分控器发出指令信息,单腿分控器通过腿连杆驱动件对腿连杆组件进行控制,进而实现腿连杆组件在竖直方向上的运动,进而实现机器人的行走和柔顺缓冲着陆。
14、进一步地,腿连杆组件包括与一个腿连杆驱动件的输出端配合连接的第一大腿连杆、与另一个腿连杆驱动件的输出端配合连接的第二大腿连杆、第一小腿连杆、第二小腿连杆、分别连接在第一小腿连杆的首端和第二小腿连杆的首端的膝关节、以及与第一小腿连杆的尾端和第二小腿连杆的尾端转动配合的末端关节,第一大腿连杆的尾端与第一小腿连杆上的膝关节转动配合,第二大腿连杆的尾端与第二小腿连杆上的膝关节转动配合,末端关节与连接座连接。
15、本发明的第一大腿连杆和第二大腿连杆由两个腿连杆驱动件分别同时驱动,使得两个大腿连杆可以同步旋转,进而带动第一小腿连杆和第二小腿连杆上的膝关节分别绕两个大腿连杆旋转,实现了腿连杆组件在竖直方向上的运动,且通过第一大腿连杆、第二大腿连杆、第一小腿连杆以及第二小腿连杆的角度调节,使得腿连杆组件的刚度和阻尼均可进行调整,且配合黏附脚掌以适应在空间微重力环境中有一定初速度的柔顺着陆和稳定黏附,并有效降低对目标航天器的扰动。
16、进一步地,膝关节包括两个膝关节连接板以及连接在两个膝关节连接板之间的连接轴,第一大腿连杆和第二大腿连杆分别与连接轴转动配合,第一小腿连杆与一个膝关节的膝关节连接板连接,第二小腿连杆与另一个膝关节的膝关节连接板连接。
17、进一步地,z型架包括主支架以及分别连接在主支架的两侧的侧悬臂,腿连杆驱动件和角度传感器分别配合连接在侧悬臂上。
18、进一步地,驱动件通过u型架与机身连接。
19、进一步地,机身上设置有与u型架连接的固定座,机身上开设有便于安装单腿分控器、主控器和动力电池的多个载荷安装孔,且机身上开设有多个过线孔。
20、与现有技术相比,本发明具有以下优点:
21、1、本发明的可稳定柔顺着陆的黏附机器人,在机器人与目标航天器的碰撞黏附过程中,黏附脚掌作为刚度可调的一级缓冲机构,三自由度单腿作为刚度和阻尼均可调的二级缓冲机构,其共同作用以提高机器人与目标航天器的黏附成功率和稳定性,并有效降低对目标航天器的扰动。
22、2、本发明的可稳定柔顺着陆的黏附机器人,腿连杆组件采用并联腿结构,加以两个腿连杆驱动件直接并联驱动,有效提高了机器人腿的刚度、负载能力、抗冲击能力和响应速度。
23、3、本发明的可稳定柔顺着陆的黏附机器人,黏附脚掌的脚掌上板上的推动件与脚掌下板活动连接,有效降低撞击瞬间的峰值碰撞力,并保证机器人与目标航天器的碰撞黏附过程中黏附件与目标表面具有较高的贴合度,进而提供稳定的黏附力,进而实现柔顺着陆和稳定行走。
24、4、本发明的可稳定柔顺着陆的黏附机器人可以切换两种不同的模式,分别为着陆黏附模式和巡游黏附模式;着陆黏附模式成功实现了有一定初速度的柔顺着陆并稳定黏附的姿态;巡游黏附模式可以实现各方向的原地转向和稳定行走。
- 还没有人留言评论。精彩留言会获得点赞!