一种升降装置姿态稳定控制方法及电子设备与流程
本发明涉及无人机,具体涉及一种升降装置姿态稳定控制方法及电子设备。
背景技术:
1、随着汽车的发展,汽车逐步配置无人机,其中四旋翼无人机是无人机的一种重要类型,通过控制四旋翼的空气推力进而控制四旋翼无人机的上升和下降。四旋翼上推力大小涉及无人机的姿态稳定,四旋翼无人机上推力大小在变化过程中若不能同时达到设定的目标推力,则可能导致无人机失去稳定的问题。同时四旋翼无人机上推力大小在变化过程中变化不能过快,否则可能导致旋翼折断和工作寿命降低的问题。
技术实现思路
1、本发明的目的在于克服上述技术不足,提供一种升降装置姿态稳定控制方法及电子设备,解决现有技术中四旋翼无人机推力变化过快导致旋翼折断和工作寿命降低的技术问题。
2、为达到上述技术目的,本发明采取了以下技术方案:
3、第一方面、本发明提供一种升降装置姿态稳定控制方法,包括如下步骤:
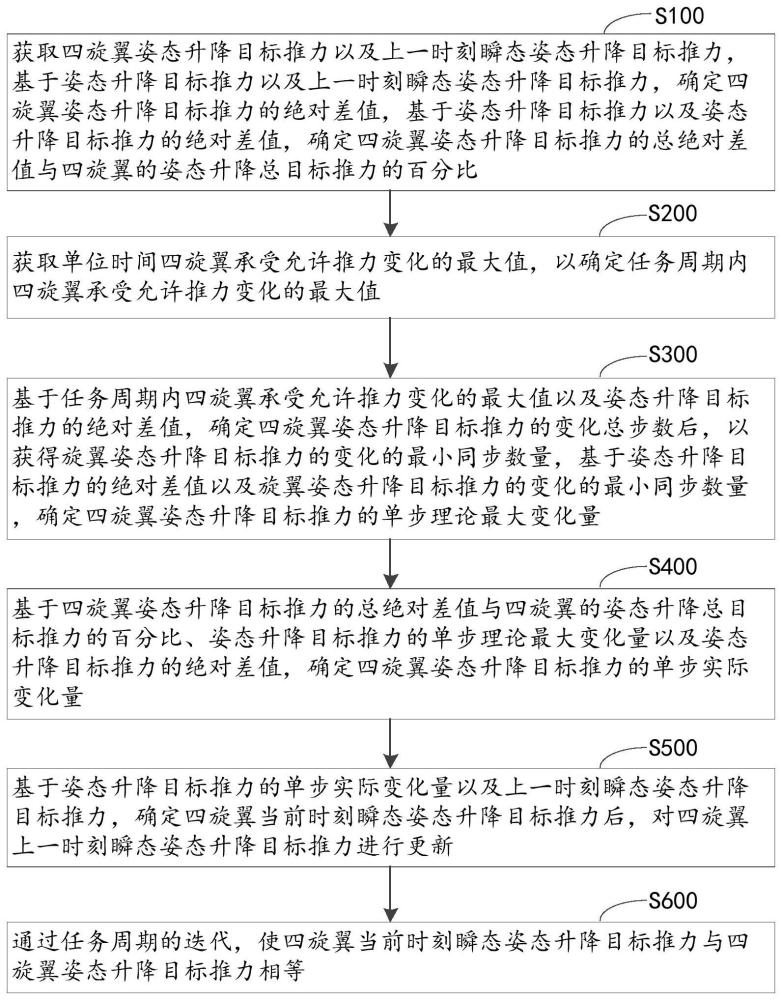
4、获取四旋翼姿态升降目标推力以及上一时刻瞬态姿态升降目标推力,基于所述姿态升降目标推力以及上一时刻瞬态姿态升降目标推力,确定四旋翼姿态升降目标推力的绝对差值,基于所述姿态升降目标推力以及姿态升降目标推力的绝对差值,确定四旋翼姿态升降目标推力的总绝对差值与四旋翼的姿态升降总目标推力的百分比;
5、获取单位时间四旋翼承受允许推力变化的最大值,以确定任务周期内所述四旋翼承受允许推力变化的最大值;
6、基于任务周期内所述四旋翼承受允许推力变化的最大值以及姿态升降目标推力的绝对差值,确定所述四旋翼姿态升降目标推力的变化总步数后,以获得旋翼姿态升降目标推力的变化的最小同步数量,基于所述姿态升降目标推力的绝对差值以及旋翼姿态升降目标推力的变化的最小同步数量,确定所述四旋翼姿态升降目标推力的单步理论最大变化量;
7、基于所述四旋翼姿态升降目标推力的总绝对差值与四旋翼的姿态升降总目标推力的百分比、姿态升降目标推力的单步理论最大变化量以及姿态升降目标推力的绝对差值,确定所述四旋翼姿态升降目标推力的单步实际变化量;
8、基于所述姿态升降目标推力的单步实际变化量以及上一时刻瞬态姿态升降目标推力,确定所述四旋翼当前时刻瞬态姿态升降目标推力后,对所述四旋翼上一时刻瞬态姿态升降目标推力进行更新;
9、通过任务周期的迭代,使所述四旋翼当前时刻瞬态姿态升降目标推力与四旋翼姿态升降目标推力相等。
10、在其中一些实施例中,所述四旋翼至少包括左前旋翼、右前旋翼、左后旋翼以及右后旋翼,所述四旋翼姿态升降目标推力的绝对差值计算式为:
11、
12、其中,ffl左前旋翼的姿态升降目标推力,ffr为右前旋翼的姿态升降目标推力,frl为左后旋翼的姿态升降目标推力,frr为右后旋翼的姿态升降目标推力,f(k-1)fl为左前旋翼的上一时刻瞬态姿态升降目标推力,f(k-1)fr为右前旋翼的上一时刻瞬态姿态升降目标推力,f(k-1)rl为左后旋翼的上一时刻瞬态姿态升降目标推力,f(k-1)rr为右后旋翼的上一时刻瞬态姿态升降目标推力,δf(k)fl为左前旋翼姿态升降目标推力的绝对差值,δf(k)fr为右前旋翼姿态升降目标推力的绝对差值,δf(k)rl为左后旋翼姿态升降目标推力的绝对差值,δf(k)rr为右后旋翼姿态升降目标推力的绝对差值。
13、在其中一些实施例中,所述四旋翼姿态升降目标推力的总绝对差值与四旋翼的姿态升降总目标推力的百分比计算式为:
14、
15、其中,γ(k)为四旋翼姿态升降目标推力的总绝对差值与四旋翼的姿态升降总目标推力的百分比。
16、在其中一些实施例中,所述任务周期内四旋翼承受允许推力变化的最大值计算式为:
17、
18、其中,δfflmax为任务周期内左前旋翼承受允许推力变化的最大值,δffrmax任务周期内右前旋翼承受允许推力变化的最大值,δfrlmax为任务周期内左后旋翼承受允许推力变化的最大值,δfrrmax为任务周期内右后旋翼承受允许推力变化的最大值,δfflmaxone为单位时间左前旋翼承受允许推力变化的最大值,δffrmaxone为单位时间右前旋翼承受允许推力变化的最大值,δfrlmaxone为单位时间左后旋翼承受允许推力变化的最大值,δfrrmaxone为单位时间右后旋翼承受允许推力变化的最大值,δtime为任务周期。
19、在其中一些实施例中,所述四旋翼姿态升降目标推力的变化总步数计算式为:
20、
21、其中,b(k)fl为左前旋翼姿态升降目标推力的变化总步数,b(k)fr为右前旋翼姿态升降目标推力的变化总步数,b(k)rl为左后旋翼姿态升降目标推力的变化总步数,b(k)rr为右后旋翼姿态升降目标推力的变化总步数;
22、所述旋翼姿态升降目标推力的变化的最小同步数量计算式为:
23、b(k)min=max(b(k)fl,b(k)fr,b(k)rl,b(k)rr),
24、
25、其中,b(k)min为旋翼姿态升降目标推力的变化的最小同步数量,b(k)min等于左前旋翼姿态升降目标推力的变化总步数、右前旋翼姿态升降目标推力的变化总步数、左后旋翼姿态升降目标推力的变化总步数、右后旋翼姿态升降目标推力的变化总步数的最大值。
26、在其中一些实施例中,所述四旋翼姿态升降目标推力的单步理论最大变化量计算式为:
27、
28、其中,δf1(k)fl为左前旋翼姿态升降目标推力的单步理论最大变化量,δf1(k)fr为右前旋翼姿态升降目标推力的单步理论最大变化量,δf1(k)rl为左后旋翼姿态升降目标推力的单步理论最大变化量,δf1(k)rr为右后旋翼姿态升降目标推力的单步理论最大变化量,b(k)min为旋翼姿态升降目标推力的变化的最小同步数量。
29、在其中一些实施例中,所述四旋翼姿态升降目标推力的单步实际变化量计算式为:
30、
31、
32、其中,δf2(k)fl为左前旋翼姿态升降目标推力的单步实际变化量,δf2(k)fr为右前旋翼姿态升降目标推力的单步实际变化量,δf2(k)rl为左后旋翼姿态升降目标推力的单步实际变化量,δf2(k)rr为右后旋翼姿态升降目标推力的单步实际变化量,s(δf(k)fl)为左前旋翼姿态升降目标推力的绝对差值的正负符号标志,s(δf(k)fr)为右前旋翼姿态升降目标推力的绝对差值的正负符号标志,s(δf(k)rl)为左后旋翼姿态升降目标推力的绝对差值的正负符号标志,s(δf(k)rr)为右后旋翼姿态升降目标推力的绝对差值的正负符号标志,min(γ(k),1)为四旋翼姿态升降目标推力的总绝对差值与四旋翼的姿态升降总目标推力的百分比与1相比后的较小值。
33、在其中一些实施例中,所述四旋翼当前时刻瞬态姿态升降目标推力计算式为:
34、
35、其中,f(k)fr为左前旋翼当前时刻瞬态姿态升降目标推力,f(k)fr为右前旋翼当前时刻瞬态姿态升降目标推力,f(k)rl为左后旋翼当前时刻瞬态姿态升降目标推力,f(k)rr为右后旋翼当前时刻瞬态姿态升降目标推力。
36、在其中一些实施例中,所述四旋翼当前时刻瞬态姿态升降目标推力与对应的四旋翼姿态升降目标推力相等计算式为:
37、
38、其中,ffl左前旋翼的姿态升降目标推力,ffr为右前旋翼的姿态升降目标推力,frl为左后旋翼的姿态升降目标推力,frr为右后旋翼的姿态升降目标推力,f(k)fr为左前旋翼当前时刻瞬态姿态升降目标推力,f(k)fr为右前旋翼当前时刻瞬态姿态升降目标推力,f(k)rl为左后旋翼当前时刻瞬态姿态升降目标推力,f(k)rr为右后旋翼当前时刻瞬态姿态升降目标推力。
39、第二方面,本发明还提供本发明还提供一种电子设备,包括:处理器和存储器;
40、所述存储器上存储有可被所述处理器执行的计算机可读程序;
41、所述处理器执行所述计算机可读程序时实现如上所述的升降装置姿态稳定控制方法中的步骤。
42、与现有技术相比,本发明提供的升降装置姿态稳定控制方法及电子设备,四旋翼当前时刻瞬态姿态升降目标推力等于其姿态升降目标推力所需的时间相等,同时到达姿态升降目标推力,避免了四旋翼当前时刻瞬态姿态升降目标推力快慢变化不相互协调,导致无人机姿态动态不稳的问题。四翼姿态升降目标推力的单步实际变化量均小于等于其任务周期内其旋翼承受允许推力变化的最大值,避免旋翼折断或者损坏的风险,提高无人机的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!