一种自定心夹持组件及在轨组装方法
本发明涉及在轨组装,特别涉及一种自定心夹持组件及在轨组装方法。
背景技术:
1、航天结构在轨自主组装是一项意义深远、极富挑战的前沿技术。利用空间机械臂,可将单次/多次发射入轨的结构模块、部组件或小型航天器等基本单元依序自主组装成大型或超大型航天器,具有建造运营维护成本低、扩展性强等优势。
2、当前,在轨组装刚性结构模块已经取得了较大的突破,并在空间站建造等领域发挥了重要作用。然而,未来更大尺寸的航天结构具有柔性大、基频低、易变形的特点,给基于空间机械臂的在轨组装技术带来了极大的挑战。一是受限于空间传感器的测量精度及星上计算资源的限制,机械臂末端的测量定位精度不高、实时性也较差,机械臂抓取操作过程中与被夹持组件会存在较大的相对位姿偏差。二是被夹持组件与空间机械臂均处于微重力环境,且存在一定的相对速度与相对角速度,机械臂末端与被夹持组件的相对位姿偏差还会随着时间变化,进一步加大抓取难度。三是在抓取操作过程中,机械臂末端执行器与被夹持组件不可避免的会产生接触和碰撞,这还会与大型柔性结构模块的柔性振动产生耦合,致使组装结构上的对接位置产生动态偏差。然而,大型柔性结构模块组装的过程要求待组装的两个模块在对接机构处精准对齐,指标要求苛刻,因此,在抓取过程实现大型柔性结构模块相对位姿误差校正以便进行精准组装是一个亟待解决的问题。
技术实现思路
1、本发明旨在至少在一定程度上解决现有技术中的上述技术问题之一。为此,本发明实施例提供一种自定心夹持组件,解决大型柔性结构模块在轨组装过程中相对位姿偏差导致难以精准对接组装的问题,保证在轨组装操作的高效、可靠与稳定。
2、本发明实施例还提供一种在轨组装方法。
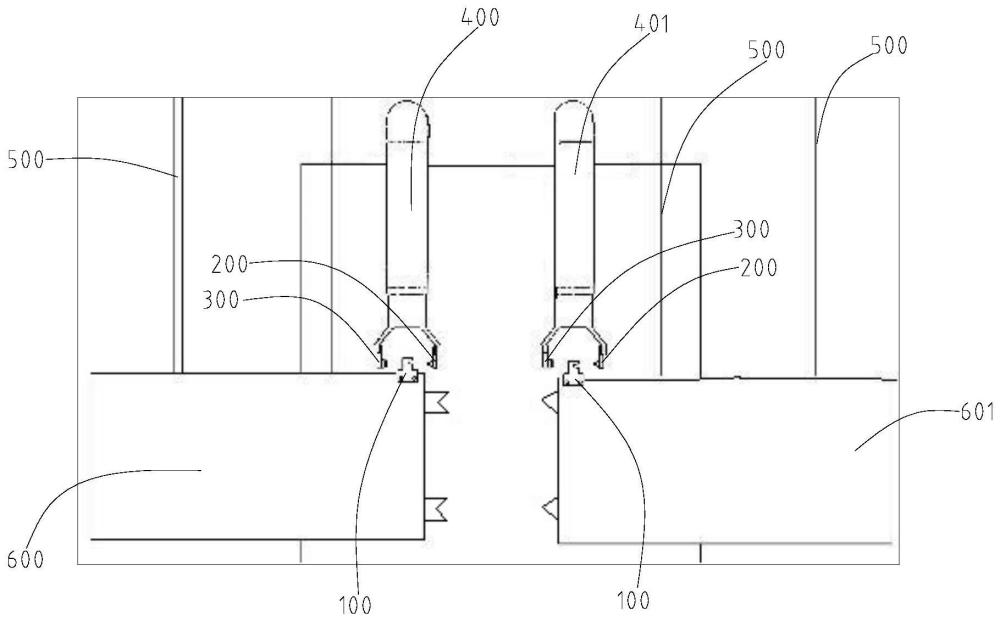
3、根据本发明第一方面的实施例,提供一种自定心夹持组件,包括第一连接件,所述第一连接件的一侧设有用于与外部对接的第一对接结构,另一侧设有第一连接部;第二连接件,所述第二连接件的一侧设有用于与外部对接的第二对接结构,另一侧设有第二连接部;以及第三连接件,所述第三连接件的两侧分别设置有第一对接部和第二对接部,所述第一连接部能够与所述第一对接部卡接,所述第二连接部能够与所述第二对接部卡接,以使所述第一连接件和所述第二连接件配置成能够将所述第三连接件定位锁紧。
4、上述自定心夹持组件,至少具有如下有益效果:第一连接件、第二连接件以及第三连接件三者组合使用的自定心夹持组件具有容差能力强、精度高、误差校正等优点。在利用双机械臂系统进行在轨组装时,基于多方面原因机械臂末端与大型柔性结构模块往往会存在一定的相对位姿误差。利用本申请的自定心夹持组件对被夹持结构进行在轨抓取,具体的,夹取时,将第三连接件固定于被夹持结构,将第一连接件和第二连接件通过机械臂驱动,使得第一连接件和第二连接件能够相向靠近或远离,当第一连接件和第二连接件相向靠近并且第一连接部与第一对接部卡接以及第二连接部与第二对接部卡接后,可以实现对第三连接件的六个自由度的锁紧并且实现夹持过程中进行自定心定位,从而完成对大型柔性结构模块位姿误差的校正。该类结构能够较好地解决由于大型柔性结构模块频率低,易受空间扰动影响等因素引起的在轨组装难对接、耗时长、冲击振动大的难题,确保组装过程的高效、精准与稳定。
5、根据本发明第一方面实施例所述的自定心夹持组件,所述第一连接件和所述第二连接件配合使用的情况下,所述第一连接部沿第一方向设置,所述第二连接部沿第二方向设置,其中,所述第一方向和所述第二方向相交。
6、根据本发明第一方面实施例所述的自定心夹持组件,所述第一方向和所述第二方向垂直。
7、根据本发明第一方面实施例所述的自定心夹持组件,所述第一连接部的径向截面呈等腰三角形或等腰梯形,所述第一对接部为与所述第一连接部相适配的卡槽。
8、根据本发明第一方面实施例所述的自定心夹持组件,所述第二连接部的径向截面呈等腰三角形或等腰梯形,所述第二对接部为与所述第二连接部相匹配的缺槽。
9、根据本发明第一方面实施例所述的自定心夹持组件,所述第一连接部的表面以及所述第二对接部的表面均设置有缓冲结构。
10、根据本发明第一方面实施例所述的自定心夹持组件,所述缓冲结构包括若干个阵列布置钢球,所述钢球的部分在弹簧的作用下能够伸出所述第一连接部的表面或所述第二对接部的表面。
11、根据本发明第一方面实施例所述的自定心夹持组件,所述第一对接结构包括第一定位面以及供螺栓通过的第一通孔,所述第二对接结构包括第二定位面以及供螺栓通过的第二通孔。
12、根据本发明第一方面实施例所述的自定心夹持组件,所述第三连接件的端部设置用于与外部对接的连接槽,所述第三连接件还设置有供螺栓穿过的第三通孔,所述第三通孔贯穿所述第三连接件的两侧,所述第三通孔连通所述连接槽。
13、根据本发明第二方面的实施例,提供一种在轨组装方法,使用上述的自定心夹持组件,包括如下步骤:
14、s1、第一机械臂和第二机械臂的末端执行器均安装上所述第一连接件和所述第二连接件,待组装的第一大型柔性结构模块和第二大型柔性结构模块均固定有所述第三连接件;
15、s2、通过轨迹规划得到在轨组装过程中所述第一机械臂和所述第二机械臂的关节角的变化规律,利用控制算法调整所述第一机械臂和所述第二机械臂的初始位置关节角,确保末端的所述第一连接件和所述第二连接件与所述第三连接件处于可抓取的范围内;
16、s3、通过所述第一机械臂或所述第二机械臂驱使所述第一连接件和所述第二连接件相向靠近,以使所述第一连接部与所述第一对接部卡接以及使所述第二连接部与所述第二对接部卡接,以完成对所述第三连接件定位锁紧,进而实现对所述第一大型柔性结构模块或所述第二大型柔性结构模块的姿态校正;
17、s4、所述第一机械臂和所述第二机械臂执行组装指令,带动所述第一大型柔性结构模块和所述第二大型柔性结构模块相向靠近,以便通过快装接头完成大型柔性结构模块的在轨组装。
18、上述在轨组装方法,至少具有如下有益效果:上述组装方案结合自定心夹持组件的实用能够较好地解决由于大型柔性结构模块频率低,易受空间扰动影响等因素引起的在轨组装难对接、耗时长、冲击振动大的难题,确保组装过程的高效、精准与稳定。
技术特征:
1.一种自定心夹持组件,其特征在于:包括
2.根据权利要求1所述的自定心夹持组件,其特征在于:所述第一连接件(200)和所述第二连接件(300)配合使用的情况下,所述第一连接部(210)沿第一方向设置,所述第二连接部(310)沿第二方向设置,其中,所述第一方向和所述第二方向相交。
3.根据权利要求2所述的自定心夹持组件,其特征在于:所述第一方向和所述第二方向垂直。
4.根据权利要求1所述的自定心夹持组件,其特征在于:所述第一连接部(210)的径向截面呈等腰三角形或等腰梯形,所述第一对接部(120)为与所述第一连接部(210)相适配的卡槽。
5.根据权利要求1所述的自定心夹持组件,其特征在于:所述第二连接部(310)的径向截面呈等腰三角形或等腰梯形,所述第二对接部(110)为与所述第二连接部(310)相匹配的缺槽。
6.根据权利要求1所述的自定心夹持组件,其特征在于:所述第一连接部(210)的表面以及所述第二对接部(110)的表面均设置有缓冲结构。
7.根据权利要求6所述的自定心夹持组件,其特征在于:所述缓冲结构包括若干个阵列布置钢球(211),所述钢球(211)的部分在弹簧的作用下能够伸出所述第一连接部(210)的表面或所述第二对接部(110)的表面。
8.根据权利要求1所述的自定心夹持组件,其特征在于:所述第一对接结构包括第一定位面以及供螺栓通过的第一通孔(220),所述第二对接结构包括第二定位面以及供螺栓通过的第二通孔(320)。
9.根据权利要求1所述的自定心夹持组件,其特征在于:所述第三连接件(100)的端部设置用于与外部对接的连接槽(130),所述第三连接件(100)还设置有供螺栓穿过的第三通孔(140),所述第三通孔(140)贯穿所述第三连接件(100)的两侧,所述第三通孔(140)连通所述连接槽(130)。
10.一种在轨组装方法,使用上述权利要求1至9中任一所述的自定心夹持组件,其特征在于,包括如下步骤:
技术总结
本发明公开了一种自定心夹持组件及在轨组装方法,涉及空间在轨组装技术领域,包括第一连接件,第一连接件的一侧设有用于与外部对接的第一对接结构,另一侧设有第一连接部;第二连接件,第二连接件的一侧设有用于与外部对接的第二对接结构,另一侧设有第二连接部;以及第三连接件,第三连接件的两侧分别设置有第一对接部和第二对接部,第一连接部能够与第一对接部卡接,第二连接部能够与第二对接部卡接,以使第一连接件和第二连接件配置成能够将第三连接件定位锁紧。本发明实施例提供的自定心夹持组件,能够解决大型柔性结构模块在轨组装过程中相对位姿偏差导致难以精准对接组装的问题,保证在轨组装操作的高效、可靠与稳定。
技术研发人员:王兴,王塬欣,蒋建平
受保护的技术使用者:中山大学·深圳
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!