一种基于陀螺和加速度计的推力器在轨自主诊断方法与流程
本发明涉及航天器制导与控制(gnc)系统控制,具体涉及一种基于陀螺和加速度计的推力器在轨自主诊断方法。
背景技术:
1、推力器是飞行器执行任务需求最主要的机构,推力器中推进剂的剩余量决定了飞行器是否能完成任务。因此,为使得飞行器在自主可靠地完成任务的同时保持飞行器在轨的安全性,需要对推力器是否有效进行程控诊断,并根据诊断结果进行自主重构。
2、在飞行器质量特性、控制力矩、控制推力都已经确定的情况下,陀螺的测量信息和加速度计的测量信息能反映当前推力器是否工作正常。因此,在确定陀螺和加速度计有效的前提下,结合陀螺测量信息和姿控指令喷气,加速度计测量信息和推力器输出脉宽可反映出当前推力器是否工作正常。
技术实现思路
1、本发明的目的是提供一种基于陀螺和加速度计的推力器在轨自主诊断方法,可以对推力器是否有效进行程控诊断,并根据诊断结果进行自主重构,从而使得飞行器在自主可靠地完成任务的同时保持飞行器在轨的安全性。
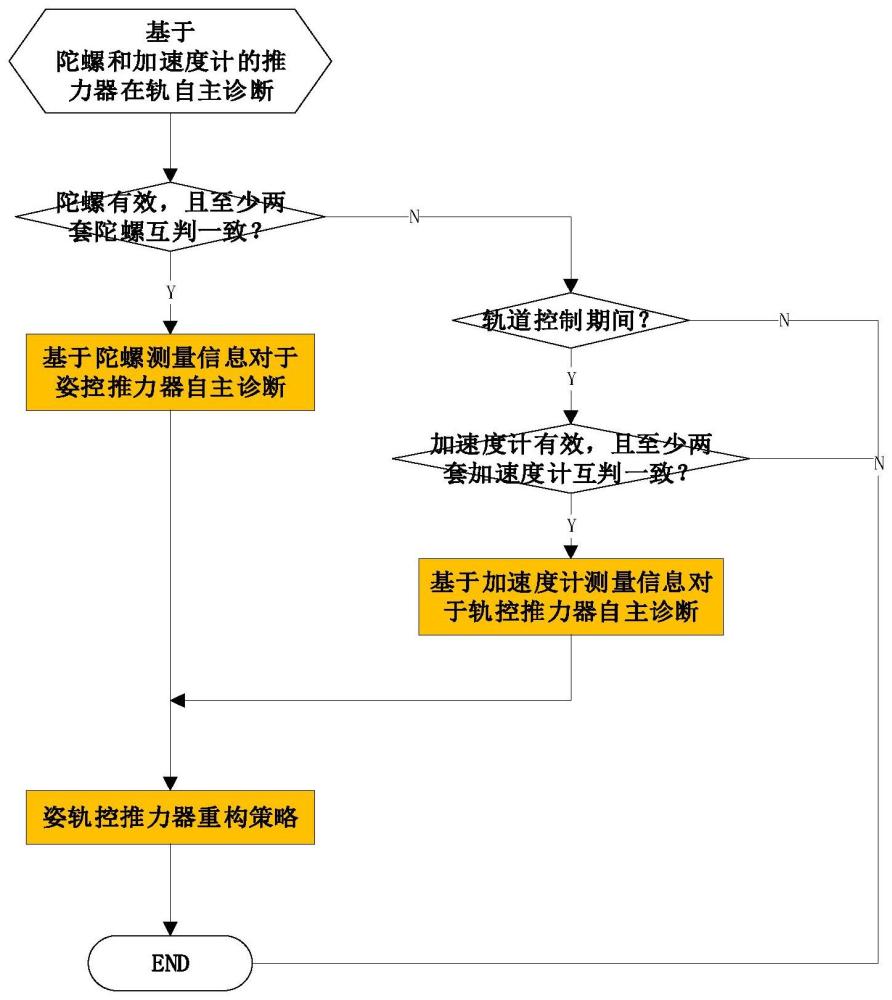
2、为实现上述目的,本发明提供一种基于陀螺和加速度计的推力器在轨自主诊断方法,所述推力器包含姿控推力器和轨控推力器,包含以下步骤:
3、s1、基于陀螺测量信息进行姿控推力器自主诊断;
4、s2、基于加速度计测量信息进行轨控推力器自主诊断;
5、s3、基于推力器自主诊断结果进行推力器重构。
6、进一步的,所述s1中,包含以下步骤:
7、s11、判断姿陀螺是否有效;是,继续运行,转s12;否,转s2;
8、其中,判断陀螺是否有效的条件为:在通信有效时,三轴角速度前后周期差值的绝对值均小于设定的阈值,且至少有两套陀螺自测数据互判一致;其中,卫星的滚动轴、俯仰轴、偏航轴均配置有对应的陀螺表头,分别用于测量滚动轴、俯仰轴和偏航轴的角速度;
9、s12、三轴循环计算喷气积分量;
10、s13、三轴循环判断,基于各轴陀螺测量信息分别确定各轴姿控推力器是否有效标志;
11、其中,所述三轴循环表示在同一周期内对卫星按顺序进行滚动轴推力器判断、俯仰轴推力器判断、偏航轴推力器的判断。
12、进一步的,所述的s12中,若本周期存在额外干扰情况,清空当前周期三轴姿控喷气积分量和前一周期三轴姿控喷气积分量;若当前周期三轴姿控指令喷气与前一周期三轴姿控喷气积分量的极性发生变化,将当前周期三轴姿控喷气积分量清0;若当前周期三轴姿控指令喷气不小于最小姿控脉宽,将当前周期三轴姿控喷气积分量累加:
13、s_prop(j)k=s_prop(j)k-1+t_acp_out(j)k,
14、其中,k代表当前周期,k-1代表前一个周期,j分别对应为滚动轴、俯仰轴、偏航轴,t_acp_out(j)k为当前周期三轴姿控指令喷气,s_prop(j)k-1为前一周期三轴姿控喷气积分量,s_prop(j)k为当前周期三轴姿控喷气积分量。
15、进一步的,所述的s13中,包含以下步骤:
16、s131、在当前周期的三轴姿控喷气积分量为0时,记录该轴当前周期的角速度;
17、s132、若当前周期的三轴姿控喷气积分量的绝对值大于设定的阈值,计算当前周期的角速度变化量,并清空当前周期的三轴姿控喷气积分量,其中,角速度变化量为:
18、delt_wbi(j)=gyro_wbi(j)-gyro_wbi_l(j),
19、其中,delt_wbi(j)为当前周期的角速度变化量,gyro_wbi(j)为当前周期的角速度,gyro_wbi_l(j)为前一周期的角速度;
20、s133、若当前周期的角速度变化量的极性与三轴姿控喷气积分量的极性相反,或角速度变化量的绝对值小于0.5*δω(j),置该轴陀螺判姿控推力器无效标志;若当前周期的角速度变化量的极性与三轴姿控喷气积分量的极性相同,且角速度变化量的绝对值大于0.8*δω(j),置该轴陀螺判姿控推力器有效标志。
21、其中,所述s132中,所述阈值t(j)为三轴姿控喷气积分量的判断阈值:
22、
23、其中,j(j)分别为三轴的主惯量,δω(j)为三轴理论变化角速度阈值,t(j)为三轴的喷气控制力矩。
24、进一步的,所述的s2中,包含以下步骤:
25、s20、判断飞行器是否在轨道控制期间;是,继续运行,转s21;否,转s3;
26、s21、判断加速度计是否有效;是,继续运行,转s22;否,转s3。
27、其中,判断加速度计是否有效的条件为:在通信有效时,三轴加速度绝对值未超过设定阈值,且至少有两套加速度计组合自测数据互判一致;
28、其中,卫星的滚动轴、俯仰轴、偏航轴均配置有对应的加速度计表头,分别用于测量滚动轴、俯仰轴和偏航轴的加速度;
29、s22、基于轨控推力器输出的推力脉宽、以及卫星质量,计算轨控推力器的三轴理论加速度;
30、s23、确定用于判断轨控推力器的理论加速度阈值;
31、其中,当理论加速度绝对值大于设定的最小阈值时,基于加速度的实际测量值对轨控推力器进行判断;
32、s24、三轴循环判断,分别确定各轴加速度计是否判轨控推力器有效标志。
33、进一步的,所述的s22中,轨控推力器的三轴理论加速度为:
34、
35、其中,为n个轨控推力器的推力,tout1、tout2、toutn为n个轨控推力器一个控制周期的推力脉宽,m为卫星质量,t为控制周期。
36、进一步的,所述的s24中,当各轴加速度计的实测值在理论加速度的0.7~1.3倍之间,且各轴加速度计的实测值与理论加速度的差值小于设定阈值,置该轴加速度计判轨控推力器有效标志;否则,置该轴加速度计判轨控推力器无效标志。
37、进一步的,所述的s3中,基于推力器自主诊断结果进行推力器重构,包含两种重构策略:
38、s31、姿控推力器重构策略,若陀螺判断x轴、或y轴、或z轴的姿控推力器无效,则使用备份的姿控推力器替换无效的姿控推力器;
39、s32、轨控推力器重构策略,若加速度计判断x轴、或y轴、或z轴的轨控推力器无效,则使用备份的轨控推力器替换无效的轨控推力器。
40、综上所述,本发明所提供的一种基于陀螺和加速度计的推力器在轨自主诊断方法,能够对飞行器的推力器是否有效进行程控诊断,并根据诊断结果进行推力器自主重构,从而使得飞行器在完成任务的同时保持在轨的安全性。
技术特征:
1.一种基于陀螺和加速度计的推力器在轨自主诊断方法,所述推力器包含姿控推力器和轨控推力器,其特征在于,包含以下步骤:
2.如权利要求1所述的一种基于陀螺和加速度计的推力器在轨自主诊断方法,其特征在于,所述s1中,包含以下步骤:
3.如权利要求2所述的一种基于陀螺和加速度计的推力器在轨自主诊断方法,其特征在于,所述的s12中,
4.如权利要求3所述的一种基于陀螺和加速度计的推力器在轨自主诊断方法,其特征在于,所述的s13中,包含以下步骤:
5.如权利要求4所述的一种基于陀螺和加速度计的推力器在轨自主诊断方法,其特征在于,所述s132中,所述阈值t(j)为三轴姿控喷气积分量的判断阈值:
6.如权利要求1所述的一种基于陀螺和加速度计的推力器在轨自主诊断方法,其特征在于,所述的s2中,包含以下步骤:
7.如权利要求6所述的一种基于陀螺和加速度计的推力器在轨自主诊断方法,其特征在于,所述的s22中,轨控推力器的三轴理论加速度为:
8.如权利要求6所述的一种基于陀螺和加速度计的推力器在轨自主诊断方法,其特征在于,所述的s24中,当各轴加速度计的实测值在理论加速度的0.7~1.3倍之间,且各轴加速度计的实测值与理论加速度的差值小于设定阈值,置该轴加速度计判轨控推力器有效标志;否则,置该轴加速度计判轨控推力器无效标志。
9.如权利要求1所述的一种基于陀螺和加速度计的推力器在轨自主诊断方法,其特征在于,所述的s3中,基于推力器自主诊断结果进行推力器重构,包含两种重构策略:
技术总结
本发明涉及一种基于陀螺和加速度计的推力器在轨自主诊断方法,所述推力器包含姿控推力器和轨控推力器,包含以下步骤:S1、基于陀螺测量信息进行姿控推力器自主诊断;S2、基于加速度计测量信息进行轨控推力器自主诊断;S3、基于推力器自主诊断结果进行推力器重构。本发明能够对飞行器的推力器是否有效进行程控诊断,并根据诊断结果进行推力器自主重构,从而使得飞行器在完成任务的同时保持在轨的安全性。
技术研发人员:张肖,毕雨雯,龚程,于皓,王向,姜泽华,张钰轲
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!