轨控发动机故障下的自主离轨制动控制方法和装置与流程
本发明实施例涉及飞行器离轨制动,特别涉及一种轨控发动机故障下的自主离轨制动控制方法和装置。
背景技术:
1、可重复使用飞行器在完成空间任务后,还需确保能够顺利返回。在进入大气层前,飞行器需要从在轨轨道进行离轨制动,完成离轨制动后飞行器经过空间滑行到达再入点。可重复使用飞行器与飞船返回相比因为其需要更强的自主性、快速机动性,同时对地面站的使用有很多的限制,所以有可能导致地基和天基测控资源没法全方位全时段的监视飞行,这就导致如果其采用神舟飞船地面规划星上执行的策略存在较多的使用约束,极大限制了其自主性和快速机动性,因此,可重复使用飞行器的离轨制动最好采用星上在轨自主规划的策略。
2、另外,离轨制动所需的轨控发动机一般具有有限的使用次数,长时间的在轨运行和多次轨控后,可能会发生单机故障或性能异常的情况。为了保证离轨制动的故障容错,飞行器上通常会配备推力大小不一样的两类轨控发动机。因此,在轨诊断出一种轨控发动机出现问题后,怎么快速的切换利用剩下的轨控发动机执行离轨制动脉冲,这点对天地往返飞行器的自主离轨制动返回成功至关重要。
3、然而,传统的自主离轨制动控制方法并没有涉及轨控发动机的在轨诊断,以及诊断出故障后如何快速二次规划出剩余脉冲的离轨制动方法。因此,传统的自主离轨制动控制方法的实用性较差,难以实现可重复使用飞行器在轨控发动机故障下的高精度离轨返回。
4、因此,亟需一种轨控发动机故障下的自主离轨制动控制方法。
技术实现思路
1、为了解决传统的自主离轨制动控制方法的实用性较差,难以实现可重复使用飞行器在轨控发动机故障下的高精度离轨返回的问题,本发明实施例提供了一种轨控发动机故障下的自主离轨制动控制方法和装置。
2、第一方面,本发明实施例提供了一种轨控发动机故障下的自主离轨制动控制方法,方法包括:
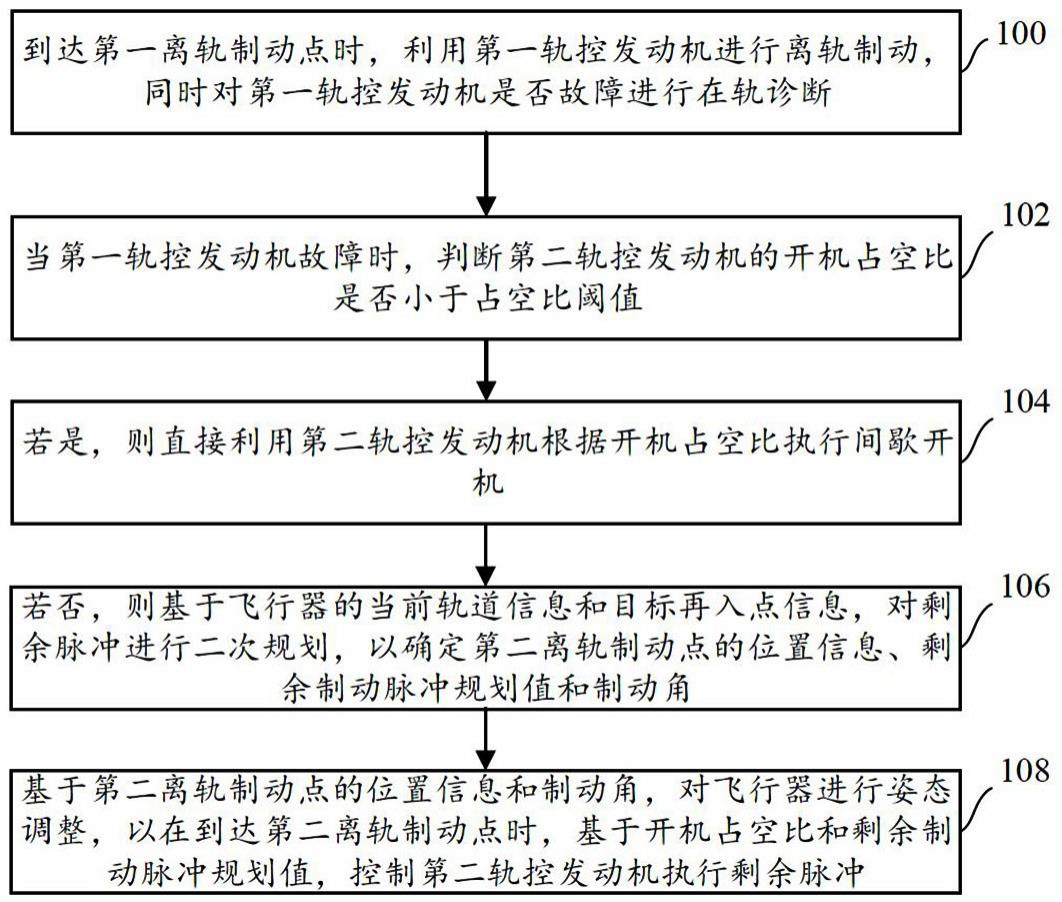
3、到达第一离轨制动点时,利用第一轨控发动机进行离轨制动,同时对所述第一轨控发动机是否故障进行在轨诊断;
4、当所述第一轨控发动机故障时,判断第二轨控发动机的开机占空比是否小于占空比阈值;其中,所述第一轨控发动机的推力小于所述第二轨控发动机;
5、若是,则直接利用所述第二轨控发动机根据所述开机占空比执行间歇开机;
6、若否,则基于所述飞行器的当前轨道信息和目标再入点信息,对剩余脉冲进行二次规划,以确定第二离轨制动点的位置信息、剩余制动脉冲规划值和制动角;
7、基于所述第二离轨制动点的位置信息和制动角,对所述飞行器进行姿态调整,以在到达所述第二离轨制动点时,基于所述开机占空比和剩余制动脉冲规划值,控制所述第二轨控发动机执行剩余脉冲。
8、第二方面,本发明实施例还提供了一种轨控发动机故障下的自主离轨制动控制装置,装置包括:
9、诊断单元,用于到达第一离轨制动点时,利用第一轨控发动机进行离轨制动,同时对所述第一轨控发动机是否故障进行在轨诊断;
10、判断单元,用于当所述第一轨控发动机故障时,判断第二轨控发动机的开机占空比是否小于占空比阈值;其中,所述第一轨控发动机的推力小于所述第二轨控发动机;
11、第一制动单元,用于若是时,直接利用所述第二轨控发动机根据所述开机占空比执行间歇开机;
12、规划单元,用于若否时,基于所述飞行器的当前轨道信息和目标再入点信息,对剩余脉冲进行二次规划,以确定第二离轨制动点的位置信息、剩余制动脉冲规划值和制动角;
13、第二制动单元,用于基于所述第二离轨制动点的位置信息和制动角,对所述飞行器进行姿态调整,以在到达所述第二离轨制动点时,基于所述开机占空比和剩余制动脉冲规划值,控制所述第二轨控发动机执行剩余脉冲。
14、第三方面,本发明实施例还提供了一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现本说明书任一实施例所述的方法。
15、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行本说明书任一实施例所述的方法。
16、本发明实施例提供了一种轨控发动机故障下的自主离轨制动控制方法和装置,通过对第一轨控发动机进行在轨诊断,在诊断出第一轨控发动机故障后,先基于第二轨控发动机预先设置的开机占空比与占空比阈值的关系,判断是否可以直接开启第二轨控发动机,使第二轨控发动机按照开机占空比直接进行间歇制动;当第二轨控发动机的开机占空比大于等于占空比阈值时,基于飞行器的当前轨道信息和目标再入点信息,二次规划剩余制动脉冲和第二离轨制动点,以利用第二轨控发动机继续执行剩余脉冲。因此,本方案可以对第一轨控发动机进行在轨诊断,以在诊断出第一轨控发动机故障后,快速二次规划出可行的制动策略,确保飞行器在轨控发动机故障情况下仍然可以高精度离轨返回。
技术特征:
1.一种轨控发动机故障下的自主离轨制动控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,是通过如下方式对所述第一轨控发动机进行在轨诊断的:
3.根据权利要求2所述的方法,其特征在于,每一个控制周期时所述标称累计速度增量是通过如下方式进行累加计算的:
4.根据权利要求1所述的方法,其特征在于,所述基于所述飞行器的当前轨道信息和目标再入点信息,对剩余脉冲进行二次规划,以确定第二离轨制动点的位置信息、剩余制动脉冲规划值和制动角,包括:
5.根据权利要求4所述的方法,其特征在于,所述方程组为:
6.根据权利要求4所述的方法,其特征在于,在所述基于当前轨道信息、过渡轨道信息和所述第二离轨制动点的纬度幅角,分别确定离轨制动前和离轨制动后的切向速度分量和法向速度分量,以得到剩余制动脉冲规划值之后,还包括:
7.根据权利要求6所述的方法,其特征在于,所述保护策略是通过如下公式计算新的剩余制动脉冲规划值和新的第二离轨制动点的纬度幅角的:
8.一种轨控发动机故障下的自主离轨制动控制装置,其特征在于,包括:
9.一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行权利要求1-7中任一项所述的方法。
技术总结
本发明涉及飞行器离轨制动技术领域,特别涉及一种轨控发动机故障下的自主离轨制动控制方法和装置。方法包括:到达第一离轨制动点时,利用第一轨控发动机进行离轨制动,同时对第一轨控发动机是否故障进行在轨诊断;当第一轨控发动机故障时,判断第二轨控发动机的开机占空比是否小于占空比阈值;第一轨控发动机的推力小于第二轨控发动机;若否,则基于飞行器的当前轨道信息和目标再入点信息,二次规划剩余制动脉冲和第二离轨制动点,以保证飞行器能够利用第二轨控发动机继续执行剩余脉冲。本方案,可以对第一轨控发动机进行在轨诊断,以在诊断出第一轨控发动机故障后,快速二次规划出可行的制动策略,确保故障情况下仍然可以高精度离轨返回。
技术研发人员:李毛毛,龚宇莲,张海博,常亚菲,何英姿,李川,孙帅
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!