一种基于代数条件的复杂外形航天器碰撞规避控制方法
本发明涉及一种考虑碰撞规避的航天器编队控制方法,属于航天器编队控制领域。
背景技术:
1、随着空间技术的发展,对具有高价值的失效航天器进行在轨服务已经成为一项不可或缺的技术。在轨服务的关键步骤是近距离接近目标,在该过程中观察和监测目标,从而提取一些特征信息以便后续捕获和维修任务的展开。例如目标航天器表面的损伤故障特征,可用于机械臂抓捕的结构特征等。相比于传统的一对一在轨服务,利用批量化生产的小型航天器进行近距离在轨操作,既能降低生产成本,又能提高任务的执行效率与成功率。
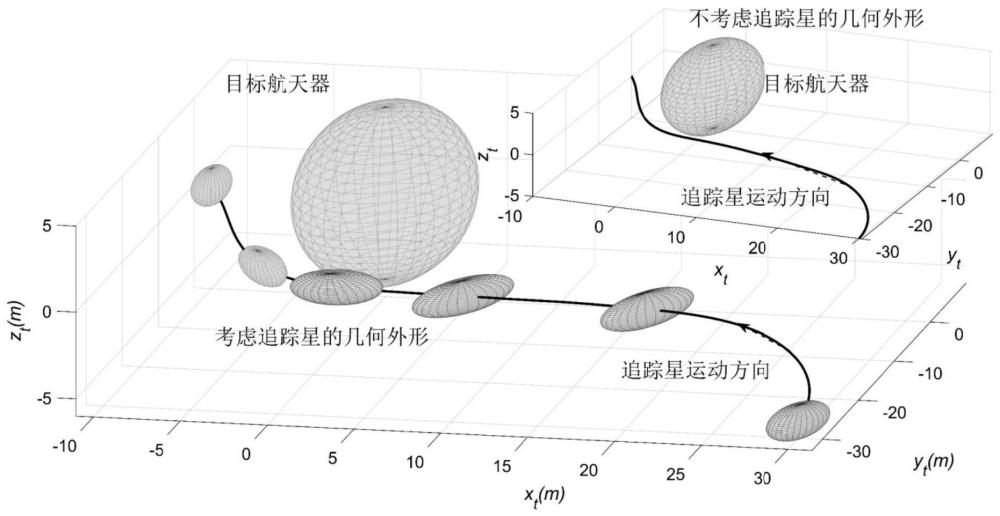
2、考虑航天器碰撞规避时,从追踪星的几何外形的角度大致将避碰约束建模分为两种思路。其一是将追踪星视为质点,尽可能将目标航天器的外形尺寸精确建模。如建立安全路径约束,以满足安全对接的要求。或为目标建立球形避碰包络,以达到无碰撞交会的目的。部分研究利用超二次曲面建立目标航天器的外形包络,该方法能够建立非凸的且更加接近航天器的几何外形。然而在思路一的情形下,追踪星的姿态机动可能会导致其附件与目标航天器发生碰撞。其二是利用简单的球形包络描述追踪星的外形。如为目标航天器建立球与椭球结合的复合外形包络,而后基于高斯伪谱法进行轨迹规划以实现碰撞规避。或者是为目标航天器建立球与椭球结合的复合外形包络,而后基于滚动时域与序列凸规划方法解决了近距离接近中的碰撞规避问题。有学者从分子学角度出发将单个追踪星视为原子,将追踪星之间的碰撞规避作用力看作是各向同性分子间的作用力,基于兰纳琼斯势为航天器编队设计了分布式碰撞规避机制。
3、对于追踪星而言,若其携带大型帆板或附件,利用椭球包络描述追踪星的外形尺寸能进一步降低约束建模的保守性。然而,没有直接的算法来计算两个椭球体之间的距离。现有研究先将追踪星的椭球包络转换成单位球,再利用特征值算法计算出空间中两个椭球之间的距离,但该算法忽略了椭球的姿态运动。
4、综上,现有的碰撞规避约束建模方法中常将追踪星简化为质点或圆球体,保守性太大。当同时考虑追踪星与目标航天器的几何外形时,现有的基于优化方法的航天器碰撞规避策略需要较大的计算资源,不利于工程实践。而且,现有的航天器碰撞规避方法并未同时在3d层面考虑航天器的几何外形与相对姿态之间的耦合作用,这将导致航天器在空间中进行近距离位姿机动时发生碰撞。
5、因此,针对以上不足,需要提供一种同时考虑追踪星和目标航天器几何外形的时的碰撞规避技术,可解决三维空间下相对姿态与几何外形耦合的航天器碰撞规避方法,以满足存在运动约束时多航天器近距离过程中的安全性要求。
技术实现思路
1、针对以上不足,本发明提供一种基于代数条件的复杂外形航天器碰撞规避控制方法。
2、本发明所述一种基于代数条件的复杂外形航天器碰撞规避控制方法,该方法包括以下步骤:
3、s1、基于李群se(3)建立追踪星相对空间翻滚目标航天器的运动学及动力学方程;
4、s2、引入位形误差势函数以获取位形误差矢量
5、s3、设计碰撞规避机制,包括追踪星和目标航天器之间的碰撞规避和追踪星之间的碰撞规避,所述追踪星和目标航天器均构建最小包络椭球;
6、s4、为碰撞规避约束设计连续可微的人工势函数φpk;
7、s5、结合s1-s4设计碰撞规避反馈控制律:
8、
9、其中,
10、表示第k个追踪星的控制输入,k=1,...,n,n为追踪星的数量,
11、为势函数在第k,个追踪星上产生用于碰撞规避的控制量,
12、
13、式中:表示求关于(·)的梯度,是第k,个追踪星相对目标航天器姿态误差,ψk表示碰撞规避势函数,(·)∨表示映射,映射(·)∨:表示将中的矩阵映射到同构的实空间表示第k个追踪星相对目标航天器的位置误差,为第k个追踪星相对目标航天器的期望姿态,为第k个追踪星相对目标航天器的期望位置,
14、为第k个追踪星的不与势函数相关的基础反馈控制器,
15、
16、式中:kf、kl为待设计的正定控制增益矩阵,且
17、表示第k个追踪星的本体坐标系相对于目标航天器本体坐标系的速度矢量,和分别表示相对于的转动速度与平动速度;
18、表示第k个追踪星上的重力作用项,
19、jk,mk分别表示第k个追踪星的转动惯量与质量,e3表示三阶单位阵;
20、adg为李群se(3)上元素g的伴随算子,adξ为ξ的伴随算子
21、
22、表示相对的速度,和分别表示相对于的转动速度与平动速度;
23、为干扰上界的估计值。
24、优选地,伴随算子adg、adξ的矩阵表达式为:
25、(·)×表示求取反对称矩阵,
26、任意任意ξ=[ω v],其中r∈so(3)表示旋转矩阵,表示旋转矢量,表示旋转角速度,表示平动速度。
27、优选地,s1中的追踪星相对空间翻滚目标航天器的运动学及动力学方程为相对运动系统的动力学方程,表达式为:
28、
29、式中:
30、
31、式中,rtk为到的坐标转换矩阵,表示第k个追踪星相对于目标航天器的相对位置矢量在下的坐标,rit表示目标航天器本体坐标系到地心惯性坐标系的坐标转换矩阵,rti和分别为目标航天器和第k个追踪星在目标航天器本体坐标系下的位置矢量,
32、第k个追踪星上的重力作用项表示重力项,该矢量方向为从地心指向目标航天器或第k个追踪星的质心,μ表示地球的万有引力常数,μ=398600.47km3/s2,rik表示第k个追踪星的本体坐标系到地心惯性坐标系的坐标转换矩阵,
33、表示作用在第k个追踪星上的外部干扰。
34、优选地,s2中的位形误差矢量根据第k个追踪星的相对目标航天器的误差运动学方程获取:
35、
36、方程中:
37、中间变量
38、中间变量
39、(·)∧表示将中的向量映射到同构的矩阵空间
40、优选地,s3的碰撞规避机制为:
41、一个目标航天器t以及n个追踪星均构建最小包络椭球,n+1个椭球体定义为椭球系统集合每个椭球描述为矩阵当i=1,...,n时,gi为第k个追踪星相对目标航天器的位姿,当i=t时,gi为目标航天器的位姿,其中为椭球包络相关的参数矩阵,且ai、bi、ci分别表示第i个椭球包络的xyz三轴的半轴长;
42、追踪星和目标航天器之间的碰撞规避机制:
43、当成立时,表征第k个追踪星没有与目标航天器发生碰撞,否则表征为碰撞;
44、△kt为第k个追踪星与目标航天器的碰撞约束函数,分别为用以判断第k个追踪星椭球和目标航天器椭球在xy、xz、yz二维投影平面接触情况的判别式;
45、n个追踪星之间的碰撞规避机制为:
46、
47、当μk>0时,表征第k个追踪星没有与其他追踪星发生碰撞,否则表征碰撞;
48、△kj为第k个追踪星和第j个追踪星之间的碰撞约束函数,分别为用以判断第k个追踪星椭球和第j个追踪星椭球在xy、xz、yz二维投影平面接触情况的判别式;
49、为用以判断第k个追踪星和第j个追踪星在xy、xz、yz二维投影平面碰撞情况的判别式之和,
50、为待设计的常数,且满足关系式为第k个追踪星和第j个追踪星之间的安全半径下界对应的判别式的值。
51、优选地,s4中的人工势函数φpk:
52、
53、式中:lpk,κpk,mpk为待设计的正常数,
54、为群误差,为第k个追踪星与目标航天器之间的位形误差,
55、本发明的有益效果:相比现有的航天器间碰撞规避策略,本发明可以解决同时考虑多航天器之间的相对姿态与几何外形时的碰撞规避问题。避免了对航天器外形的过度简化带来的高保守性。引入位形误差势函数,方便位姿一体化控制律的设计。同时,结合人工势函数法设计碰撞规避控制律,相较于现有的优化方法,避免了同时考虑多颗追踪星与目标航天器的几何外形时对计算资源的高度依赖。本方法在3d层面考虑了航天器的几何外形与相对姿态,这将避免航天器在三维空间中进行位姿机动时发生碰撞。
- 还没有人留言评论。精彩留言会获得点赞!