前后倾转旋翼垂直起降固定翼飞机的制作方法
本发明涉及一种电动垂起固定翼飞机,尤其是能消除螺旋桨尾流相互干扰的前后倾转旋翼垂直起降固定翼飞机。
背景技术:
1、目前公知的电动垂起固定翼飞机采用常规四旋翼加固定翼的复合飞机如4+1垂起固定翼飞机,或采用可倾转的常规六旋翼加固定翼的复合飞机,由于直接引用常规四旋翼或常规六旋翼的技术,具有技术成熟的优点,但也同时带来常规四旋翼或常规六旋翼的缺点,无论采用常规四旋翼或常规六旋翼架构,在前面的螺旋桨的平行于机身纵轴的轴线后面,总有两个螺旋桨的后面各有一个螺旋桨,当水平飞行时,前面的螺旋桨的尾流流过后面的螺旋桨,增加了飞行阻力,前面的螺旋桨的尾流干扰后面的螺旋桨的飞行,降低后面螺旋桨的飞行效率;当采用可倾转的常规四旋翼或六旋翼与固定翼复合成垂起固定翼飞机时,在旋翼倾转的过程中,需要横滚操纵时,总会存在航向干扰问题;螺旋桨处于倾斜时,当需要横滚操纵,需要左边的螺旋桨和右边的螺旋桨在垂直方向的分力差动操纵横滚,引起在水平方向的分力同时差动,从而产生航向干扰,需要反方向的航向操纵克服干扰,降低了航向操纵的操纵能力,影响倾转旋翼时的飞行稳定性。
技术实现思路
1、为了消除螺旋桨尾流相互干扰,减少飞行阻力,克服在旋翼倾转的过程中航向干扰,提高飞行效率和航向操纵的能力,本发明提供前后倾转旋翼垂直起降固定翼飞机,实现这一目标。
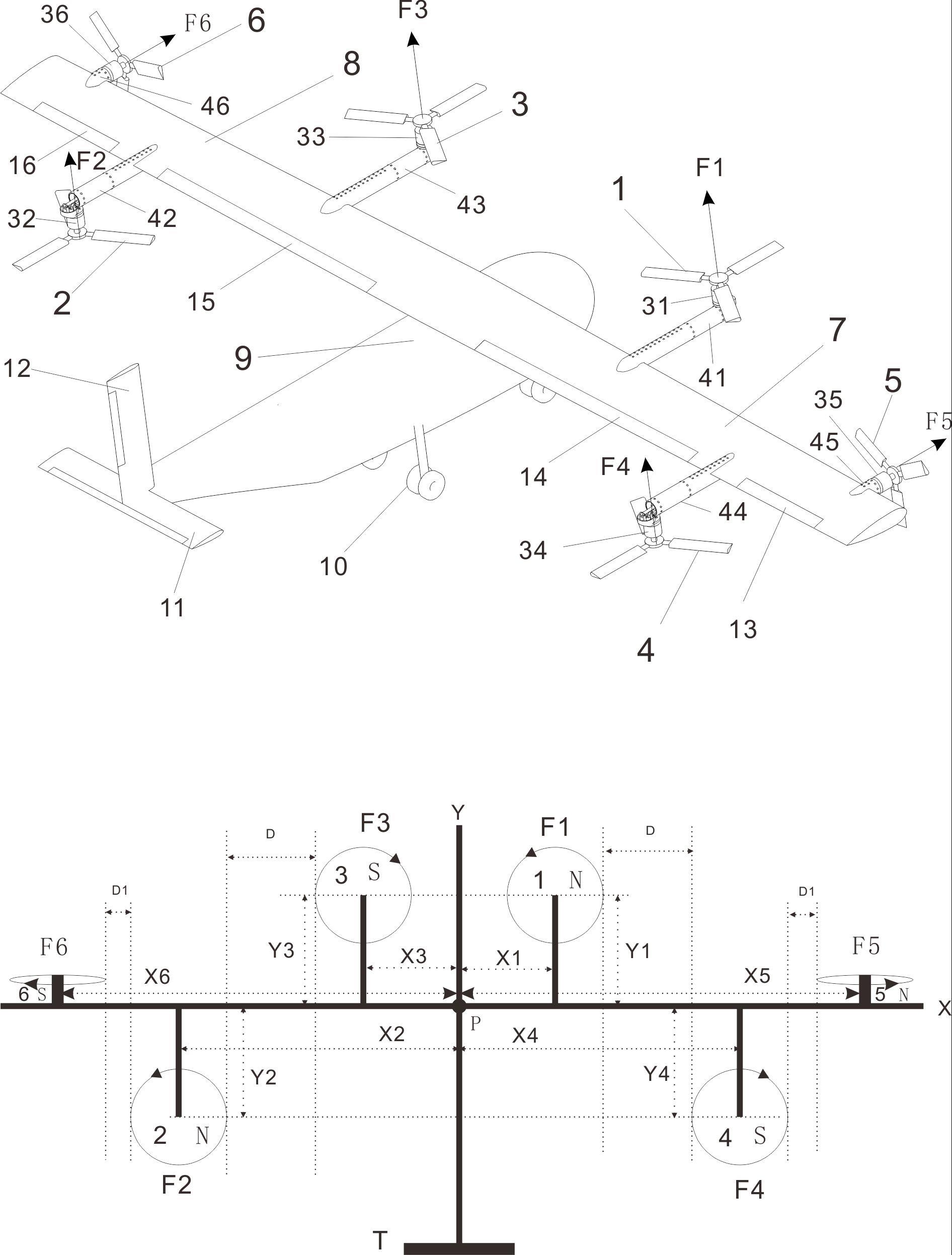
2、本发明解决其技术问题所采用的技术方案是:采用非常规六旋翼加常规上单翼固定翼飞机的复合,构成前后倾转旋翼垂直起降固定翼飞机,常规上单翼固定翼飞机的尾部设置水平尾翼和垂直尾,上单翼固定翼飞机的固定翼可采用梯形翼,固定翼上设置副翼和襟翼,上单翼固定翼飞机的机身下重心附近设置三点轮式起落架。
3、在固定翼的右边机翼靠近机身的翼梁处连接右内向前倾转组件,使右内向前倾转组件向前伸出机翼前缘,在右内向前倾转组件上连接右内前电机,右内前电机上连接右内前螺旋桨,右内向前倾转组件处于初始状态时,右内前电机轴垂直向上,右内前螺旋桨的旋转面水平,产生的升力方向垂直向上,右内前螺旋桨的旋转面在水平面的投影离开机翼的前缘;在固定翼的右边机翼远离机身的翼梁处连接右外向后倾转组件,使右外向后倾转组件向后伸出机翼后缘,在右外向后倾转组件下连接右外后电机,右外后电机下连接右外后螺旋桨,右外向后倾转组件处于初始状态时,右外后电机轴垂直向下,右外后螺旋桨的旋转面水平,产生的升力方向垂直向上,右外后螺旋桨的旋转面在水平面的投影离开机翼的后缘;在固定翼的右边机翼远离机身、右外向后倾转组件的右前方、靠近右边翼尖的翼梁处连接悬臂式右端电机安装座,右端电机安装座向前伸出机翼前缘,在右端电机安装座前连接右端电机,在右端电机前连接右边方向螺旋桨,右端电机轴水平向前、平行于机身纵轴,右边方向螺旋桨的旋转面垂直,产生的升力方向水平向前。
4、在固定翼的左边机翼靠近机身的翼梁处连接左内向前倾转组件,使左内向前倾转组件向前伸出机翼前缘,在左内向前倾转组件上连接左内前电机,左内前电机上连接左内前螺旋桨,左内向前倾转组件处于初始状态时,左内前电机轴垂直向上,左内前螺旋桨的旋转面水平,产生的升力方向垂直向上,左内前螺旋桨的旋转面在水平面的投影离开机翼的前缘;在固定翼的左边机翼远离机身的翼梁处连接左外向后倾转组件,使左外向后倾转组件向后伸出机翼后缘,在左外向后倾转组件下连接左外后电机,左外后电机下连接左外后螺旋桨,左外向后倾转组件处于初始状态时,左外后电机轴垂直向下,左外后螺旋桨的旋转面水平,产生的升力方向垂直向上,左外后螺旋桨的旋转面在水平面的投影离开机翼的后缘;在固定翼的左边机翼远离机身、左外向后倾转组件的左前方、靠近左边翼尖的翼梁处连接悬臂式左端电机安装座,左端电机安装座向前伸出左边机翼前缘,在左端电机安装座前连接左端电机,在左端电机前连接左边方向螺旋桨,左端电机轴水平向前、平行于机身纵轴,左边方向螺旋桨的旋转面垂直,产生的升力方向水平向前。
5、右内前螺旋桨、右外后螺旋桨、右边方向螺旋桨、左内前螺旋桨、左外后螺旋桨、左边方向螺旋桨,这六个螺旋桨构成非常规六旋翼飞行器部分。
6、非常规六旋翼飞行器部分的右内前螺旋桨、右外后螺旋桨、左内前螺旋桨、左外后螺旋桨,初始状态时,这四个螺旋桨的旋转面水平,产生的升力方向垂直向上;非常规六旋翼飞行器部分的右边方向螺旋桨、左边方向螺旋桨,这两个螺旋桨的旋转面垂直,产生的升力方向水平向前。
7、常规六旋翼飞行器的六个螺旋桨的旋转面水平,产生的升力方向垂直向上。
8、右内前螺旋桨、右外后螺旋桨、左内前螺旋桨、左外后螺旋桨的尺寸相同,相应的驱动电机的参数相同。
9、右边方向螺旋桨、左边方向螺旋桨的尺寸相同,相应的驱动电机的参数相同。
10、设置六个电调分别连接六个电机,飞行控制器连接各个电调,飞行控制器控制电调的电压变化使电机的转速变化,带动相应的螺旋桨的转速变化,产生相应的升力变化。
11、倾转组件采用电动缸驱动组件倾转(倾转组件也可以采用液压缸驱动、或者采用双轴舵机驱动、或者采用伺服电机驱动组件倾转,本说明以电动缸驱动为例子),换向器连接电动缸,飞行控制器连接换向器,飞行控制器控制换向器的电流方向变化使电动缸的推杆伸缩,带动倾转组件前后倾转,使连接在倾转组件的电机倾转、电机上的螺旋桨倾转,产生升力方向的倾转。
12、这就构成了前后倾转旋翼垂直起降固定翼飞机。
13、前后倾转旋翼垂直起降固定翼飞机的固定翼右边的螺旋桨和固定翼左边的螺旋桨对称于机身纵轴。
14、右内前螺旋桨、右外后螺旋桨、左内前螺旋桨、左外后螺旋桨的旋转中心到过前后倾转旋翼垂直起降固定翼飞机重心的横轴的距离相等。
15、右内前螺旋桨的旋转中心与右外后螺旋桨的旋转中心在过前后倾转旋翼垂直起降固定翼飞机重心的横轴的投影的距离大于螺旋桨的直径。
16、左内前螺旋桨的旋转中心与左外后螺旋桨的旋转中心在过前后倾转旋翼垂直起降固定翼飞机重心的横轴的投影的距离大于螺旋桨的直径。
17、右边方向螺旋桨的旋转中心与右外后螺旋桨的旋转中心在过前后倾转旋翼垂直起降固定翼飞机重心的横轴的投影的距离大于螺旋桨的直径。
18、左边方向螺旋桨的旋转中心与左外后螺旋桨的旋转中心在过前后倾转旋翼垂直起降固定翼飞机重心的横轴的投影的距离大于螺旋桨的直径。
19、前后倾转旋翼垂直起降固定翼飞机的固定翼的升力中心设置在前后倾转旋翼垂直起降固定翼飞机的重心的后边靠近重心,使固定翼飞机部分处于静稳定。
20、设置右内前螺旋桨的旋转方向和左外后螺旋桨的旋转方向相同,左内前螺旋桨的旋转方向和右外后螺旋桨的旋转方向相同;右内前螺旋桨的旋转方向和左内前螺旋桨的旋转方向相反,右外后螺旋桨的旋转方向和左外后螺旋桨的旋转方向相反。
21、设置右边方向螺旋桨的旋转方向和左边方向螺旋桨的旋转方向相反。
22、由于配备了六个螺旋桨和固定翼,前后倾转旋翼垂直起降固定翼飞机的飞行有两种飞行模式,多旋翼飞行模式和固定翼飞行模式。
23、在多旋翼飞行模式下,非常规六旋翼飞行器部分的右内前螺旋桨、左内前螺旋桨和右外后螺旋桨、左外后螺旋桨的升力差动操纵俯仰,右内前螺旋桨、右外后螺旋桨和左内前螺旋桨、左外后螺旋桨的升力差动操纵横滚;右边方向螺旋桨和左边方向螺旋桨的升力差动操纵航向。
24、非常规六旋翼飞行器部分操纵俯仰、操纵横滚的方式与常规多旋翼的方法相同,都是利用螺旋桨升力的差动操纵。
25、非常规六旋翼飞行器部分操纵航向的方式与常规多旋翼的方法不同,非常规六旋翼飞行器部分操纵航向的方式是利用右边方向螺旋桨和左边方向螺旋桨升力的差动操纵,常规多螺旋桨操纵航向是利用螺旋桨的反扭矩差动操纵航向。
26、由于反扭矩是空气作用于螺旋桨的阻力力矩,反扭矩的最大力臂的长度只有螺旋桨的半径的长度。
27、非常规六旋翼飞行器部分操纵航向的方式是利用螺旋桨升力的差动操纵,这个操纵力矩的力臂的长度接近固定翼长度的一半,比螺旋桨的半径大。
28、非常规六旋翼飞行器部分操纵航向的力矩比常规多螺旋桨操纵航向的反扭矩大很多。
29、因此,非常规六旋翼飞行器部分操纵航向的能力,比常规多螺旋桨操纵航向的能力高。
30、在固定翼飞行模式下,右内前螺旋桨、左内前螺旋桨向前倾转,升力方向由垂直向上转变为水平向前;右外后螺旋桨、左外后螺旋桨向后倾转,升力方向由垂直向上转变为水平向前;右边方向螺旋桨和左边方向螺旋桨的升力方向水平向前,这六个螺旋桨的升力驱动前后倾转旋翼垂直起降固定翼飞机水平前飞。
31、在前后倾转旋翼垂直起降固定翼飞机水平前飞时,因为,右内前螺旋桨的旋转中心与右外后螺旋桨的旋转中心在过前后倾转旋翼垂直起降固定翼飞机重心的横轴的投影的距离大于螺旋桨的直径。
32、所以,右内前螺旋桨的尾流不影响右外后螺旋桨的飞行。
33、因为,左内前螺旋桨的旋转中心与左外后螺旋桨的旋转中心在过前后倾转旋翼垂直起降固定翼飞机重心的横轴的投影的距离大于螺旋桨的直径。
34、所以,左内前螺旋桨的尾流不影响左外后螺旋桨的飞行。
35、因为,右边方向螺旋桨的旋转中心与右外后螺旋桨的旋转中心在过前后倾转旋翼垂直起降固定翼飞机重心的横轴的投影的距离大于螺旋桨的直径。
36、所以,右边方向螺旋桨的尾流不影响右外后螺旋桨的飞行。
37、因为,左边方向螺旋桨的旋转中心与左外后螺旋桨的旋转中心在过前后倾转旋翼垂直起降固定翼飞机重心的横轴的投影的距离大于螺旋桨的直径。
38、所以,左边方向螺旋桨的尾流不影响左外后螺旋桨的飞行。
39、右外后螺旋桨和左外后螺旋桨的后边没有螺旋桨。
40、六个螺旋桨的尾流没有相互干扰,减少飞行阻力,提高了飞行效率。
41、多旋翼模式飞行时,四个螺旋桨提供垂直升降动力,四个螺旋桨倾转后,进入固定翼飞行模式,变成六个螺旋桨提供前飞动力,推重比大于1,因此,在固定翼飞行模式时,飞行速度快。
42、本发明的有益效果是,多旋翼飞行器部分,各个螺旋桨相互之间的横向距离足够大,在进入固定翼飞行模式时,六个螺旋桨的尾流没有相互干扰,减少飞行阻力,提高了飞行效率;利用右边方向螺旋桨和左边方向螺旋桨升力的差动操纵航向,提高了航向操纵能力,抗旋翼倾转过程中,因横滚操纵引起的航向干扰能力强,确保前后倾转旋翼垂直起降固定翼飞机在多旋翼飞行模式和固定翼飞行模式之间稳定地自由转换,在固定翼飞行模式时,推重比大于1,飞行速度快,既可以垂直升降,又可以滑跑起降,有机场利用机场滑跑起降,起降效率高,没有机场,采用垂直起降,灵活运用多旋翼飞行模式或固定翼飞行模式,适用于偏远的、没有机场的地方起降,应用于载人、运输、救援、森林防火、农业作业、测绘等领域。
- 还没有人留言评论。精彩留言会获得点赞!