一种用于水果采摘的系留无人机及采收方法
本发明涉及高枝水果采摘设备,特别是涉及一种用于水果采摘的系留无人机及采收方法。
背景技术:
1、中国作为全球果业大国,水果种植面积和产量近年来一直稳居世界第一。机械化生产水平低下、人工成本高是限制中国水果产业发展的主要原因,而采收是目前水果机械化生产程度最低的环节。对于未按照现代化果园标准修剪的老旧果园和未经矮化密植品种改良的老旧品种而言,高枝水果的机械化采摘更是生产中亟待解决的问题。
2、拿老旧的板栗园或柿子树为例,老龄的板栗树或柿子树动辄十数米高,目前采摘大多靠工人在地面使用长杆等简略工具打落或夹取果实,或依靠工人攀爬至树上采摘,存在采摘难度大、效率低、安全隐患多等问题。
3、国内现有公开的果实采摘技术方案大多基于地面行走平台设计,主要作业目标是低矮果树,并不适用于高空或山区的采摘环境。国外以色列tevel公司开发了一款系留无人机的采摘平台,实现了标准化果园的苹果采摘。但是该方案中的无人机并未配备果箱25,单次采摘后需要往返平台进行卸果动作,作业效率低。而使用航模电池对采收无人机进行供电,不仅会增加无人机负重,同时由于电池容量的问题,进而会限制无人机的工作续航时间,降低作业效率。因此研究开发一种高枝水果采收系留无人机对于老旧存量果园的高龄未修剪果树的机械化采摘具有重大意义。
技术实现思路
1、本发明要解决的技术问题是针对以上问题和要求,提供一种用于水果采摘的系留无人机及方法。
2、为解决以上技术问题,本发明采用以下技术方案:
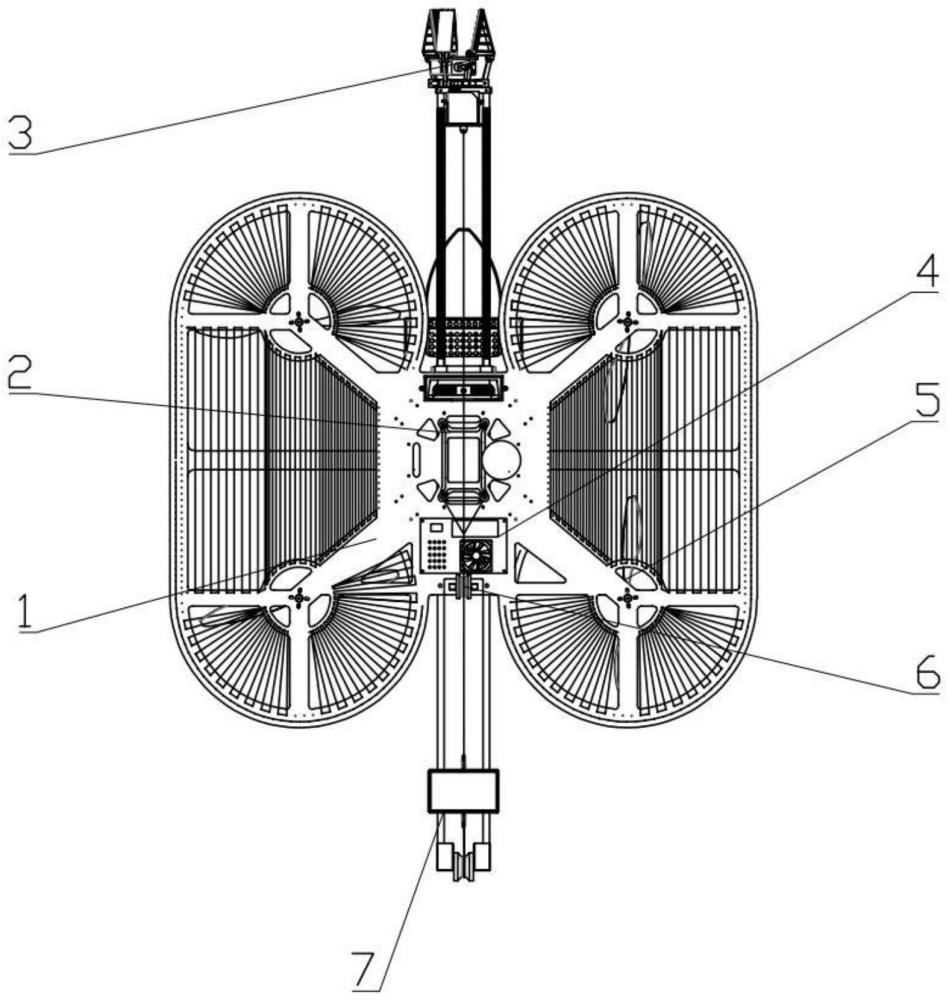
3、一种用于水果采摘的系留无人机,包括:无人机机身、螺旋桨、果实识别定位系统、连接固定装置、采摘装置、收集装置和重心调节装置;
4、所述螺旋桨、果实识别定位系统、连接固定装置、采摘装置、收集装置和重心调节装置均固定在无人机机身上,
5、所述无人机机身包括上底板、下底板、分电板和减震板,上下底板通过支撑柱固定,板外侧打孔穿线,线交错呈网状,作为机罩对螺旋桨起保护作用;
6、所述旋翼桨组件设于无人机上底板下侧;
7、所述果实识别定位系统包括立体视觉深度相机和边缘计算设备,设于无人机机身上方,立体视觉深度相机包括红外激光发射器和彩色相机,rgb彩色相机用于获取彩色图像,得到果实区域二维彩色图像,红外相机用于获取深度信息图像,将深度信息图像对齐彩色二维图像,边缘计算设备用于将深度信息图像和彩色二维图像结合对目标区域进行采摘定位;
8、所述采摘装置包括机械爪、并联碳纤维杆、双轴步进电机、齿轮和齿条,所述部件位于无人机机身上底板和下底板之间及收集装置上方,通过连接固定装置与机身固连,通过双轴步进电机实现两侧齿轮和齿条同步啮合传动,并联碳纤维杆包括两根对称且平行设置在无人机机身轴线两侧的碳纤维杆,齿条固定于并联碳纤维杆上,通过齿轮和齿条传动,带动机械爪在无人机纵轴方向上前后移动;第二舵机用于带动所述机械爪旋转,进一步通过传动连杆带动柔性指闭合抓住果实,第一舵机用于在柔性指闭合后旋转,带动机械爪旋转,对果实采摘;
9、所述收集装置包括果箱,所述收集装置位于采摘装置下方并与下底板固定连接,果箱用于暂存采摘所得果实;果箱正前方设有半圆锥形落果口,传送带下方设有压力传感器,压力传感器用于通过感受压力变化实现采摘计数,无人机用于在当果箱内收集到的果实数目达到预先设定的满载目标压力值后,亮起工作指示灯并返航;
10、所述重心调节装置包括第一定滑轮、第二定滑轮、配重盒和滑轨,第一定滑轮通过第一定滑轮固定件与上底板相连,所述滑轨包括两根平行的碳纤维杆且固定于上下底板之间,第二定滑轮通过第二定滑轮固定件于滑轨末端,所述配重盒固定于滑轨上方,能需根据前端机械爪的重量配重,第一定滑轮和第二定滑轮能相互配合用于带动配重装置平行于无人机机身轴线前后移动,调节无人机的重心位置。
11、进一步的,所述的采摘装置中的双轴步进电机通过电机固定件与上底板连接,双轴步进电机用于在接收到采摘信号后,通过齿轮和齿条啮合传动控制并联碳纤维杆进程,并联碳纤维杆一端连接机械爪,另一端由并联碳纤维杆固定件将两杆固连,向前伸展时抓取果实进行采摘,向后收回时将果实放置果箱的落果口处。
12、进一步的,所述采摘装置中的机械爪包括第一舵机、第二舵机、法兰、驱动杆、驱动板下板、驱动板上板、驱动板连接件、连杆、指座、驱动盘和柔性指;第一舵机通过舵机连接件与并联碳纤维杆连接,接收到采摘信号后第二舵机通过连杆传动控制柔性指张开闭合,随后第一舵机控制机械爪整体旋转,利用扭转力分离果实与果柄。
13、进一步的,所述果箱包括箱体、压力传感器和工作指示灯,所述传送带下方以及果箱底板下方均设置有薄膜型的压力传感器,所述传送带上设有软体隔板结构,用于将果实分隔开;传送带用于在下方的压力传感器检测到果实重量达到单层隔板满载目标值后,向后传送一格距离,当传送带下方的压力传感器达到预先设定的满载目标压力值后,工作指示灯亮起无人机返航;步进电机用于在果箱底部的压力传感器检测到触地压力信号后,控制传送带将果实逐个传出果箱,进行自动卸果。
14、进一步的,所述分电板与系留电源连接,用于为其他模块供电。
15、一种利用上述的无人机进行水果采收方法包括以下步骤:
16、步骤1、采收无人机通过rgb相机获取果园内果实的彩色图像,并通过红外激光发射器获取果实的深度信息,并将获取到的图像与深度信息传输至边缘计算设备中,由边缘计算设备对信息进行分析处理,并将果实与深度相机的相对坐标转换为果实与机械爪的实际坐标,并将处理后的信息传输至远程控制中心;
17、步骤2、远程控制中心驱动采收无人机移动到相对距离最近的目标果实处,通过rgb相机获取果实实时图像,同时红外激光发射器不断返回目标果实与机械爪的相对坐标,无人机调整自身姿态以及与果树之间的距离,使机械爪对准目标果实,且使目标果实处于无人机可抓取的范围内,同时确保采收无人机不被树枝干扰并保持稳定姿态;
18、步骤3、双轴步进电机接收到远程控制中心的采摘信号后,齿轮与齿条啮合传动推动并联碳纤维杆,使机械爪在无人机纵轴方向上前后移动到达合适位置,第二舵机通过连杆带动柔性指闭合抓取果实,随后第一舵机旋转带动机械爪整体旋转,利用拉扭力使果实与果柄分离,双轴步进电机控制并联碳纤维杆回收,使机械爪到达收集装置的落果口处,第二舵机控制机械爪张开,抓取果实并将果实放入果箱,完成果实采摘和收集后,机械爪恢复至初始位置;
19、步骤4、重复步骤1-3,直至传送带下方的压力传感器的计数结果达到预先设定的满载目标值后,无人机停止采摘返航;
20、步骤5、无人机降落时果箱底板与地面接触,步进电机用于在果箱底部压力传感器检测到压力变化超过预设阈值后通过传送带将果实逐个传出果箱,实现自动卸果。
21、本发明采用以上技术方案后,与现有技术相比,具有以下优点:
22、(1)通过采收无人机可以顺利采摘位于高处的水果,受地形限制较少,且可避免人工采摘攀爬过程中存在的安全隐患。
23、(2)本采收无人机使用系留电源进行供电,可以使无人机在空中持续性工作,减少往返次数,提高工作效率。
24、(3)采收无人机设有网状机罩,可对无人机旋翼进行保护,增加采收无人机在林间飞行的安全性。
25、(4)本发明使用柔性材料制作机械爪指爪,可减少采摘过程中对于果实的损伤。
26、(5)本发明结构新颖,通过压力传感器可进行自动检测是否满载,在落地时可实时感应自动进行卸果,配备自动卸果果箱,可舍去人工卸果过程,大幅提高采摘工作效率。
27、(2)本发明设有重心调节机构,可有效减小采摘过程中重心变化对无人机姿态的影响,增加采摘工作的安全稳定性。
28、下面结合附图和实施例对本发明进行详细说明。
- 还没有人留言评论。精彩留言会获得点赞!