一种分布式多桨垂直起降飞行器混合动力系统及管理方法与流程
本发明属于飞机混合动力,具体涉及一种分布式多桨垂直起降飞行器混合动力系统及管理方法。
背景技术:
1、分布式多桨垂直起降带机翼型飞行器采用分布式电推进系统,可以实现垂直起降和远程高速飞行。当前电池能量密度低导致续航时间短的问题在短时间内无法实现本质突破,而使用混合动力既可满足分布式电推进的要求,也可提高续航时间,是实现垂直起降飞行器高速化和远程化的主要技术途径。
2、在混合动力垂直起降飞行器方案中,单主桨直升机多采用并联混合动力方式,多旋翼垂直起降飞行器多采用串联混合动力电推进方式,由于没有机翼,二者在不同飞行阶段的功率需求差异均较小,最大在3倍左右,采用电池功率占比较小的微混动系统能够多保证发动机、电机等部件始终工作在高效工况区域内。不同于单主桨直升机和多旋翼垂直起降飞行器,分布式多桨垂直起降带机翼型飞行器在整个飞行过程中具有多旋翼垂直起降、固定翼前飞和过渡飞行三种模式。前飞模式由机翼提供升力,因此其垂直起降和前飞模式之间功率需求差异非常大,最大能达到10倍以上,且垂直起降阶段的高功率需求时间短,前飞模式的低功率需求时间长。现有技术中,采用单个发动机+发电机和小电池功率占比的串联混合动力系统时,为满足峰值功率需求,需要发动机和发电机的功率范围较大,其重量、体积等也比较大,机上布置较困难,同时长时间巡航阶段大功率发动机和发电机低功率运行时的运行效率较低,进而会缩短航程。而为了保证发动机工作在高效工况区域内,需要采用小功率发动机+发电机和大电池功率占比的串联混合动力系统,但大功率占比的电池会增加系统重量,降低了燃油储量,航程缩短的同时商载也降低。
3、因此,为了满足分布式多桨垂直起降带机翼型飞行器的飞行性能要求,目前优选采用多个发动机+发电机构成的发电模块与储能模块构成的串联混合动力系统。现有技术中,申请号为201810175125.6的专利公开了一种用于倾转旋翼飞行器的混合推进传动系统,包括:涡轴发动机、发电机或液压泵、电动马达或液压马达、推进旋翼,其中多发形式可以通过部分发动机停机来满足不同功率需求,但没有储能装置。此外,以往用于多旋翼垂直起降飞行器的串联式混合动力系统能量管理策略只针对单个发电模块和储能模块构成的串联混合动力系统,还缺乏针对多个发电模块,特别是在低功率需求下部分发电模块停机的多个发电模块与储能模块构成的串联混合动力系统的能量管理策略。
技术实现思路
1、本发明的目的在于提供一种用于分布式多桨垂直起降带机翼型飞行器的混合动力电推进系统,以及用于此种混合动力电推进系统的能量管理方法,以解决现有技术存在的上述不足。
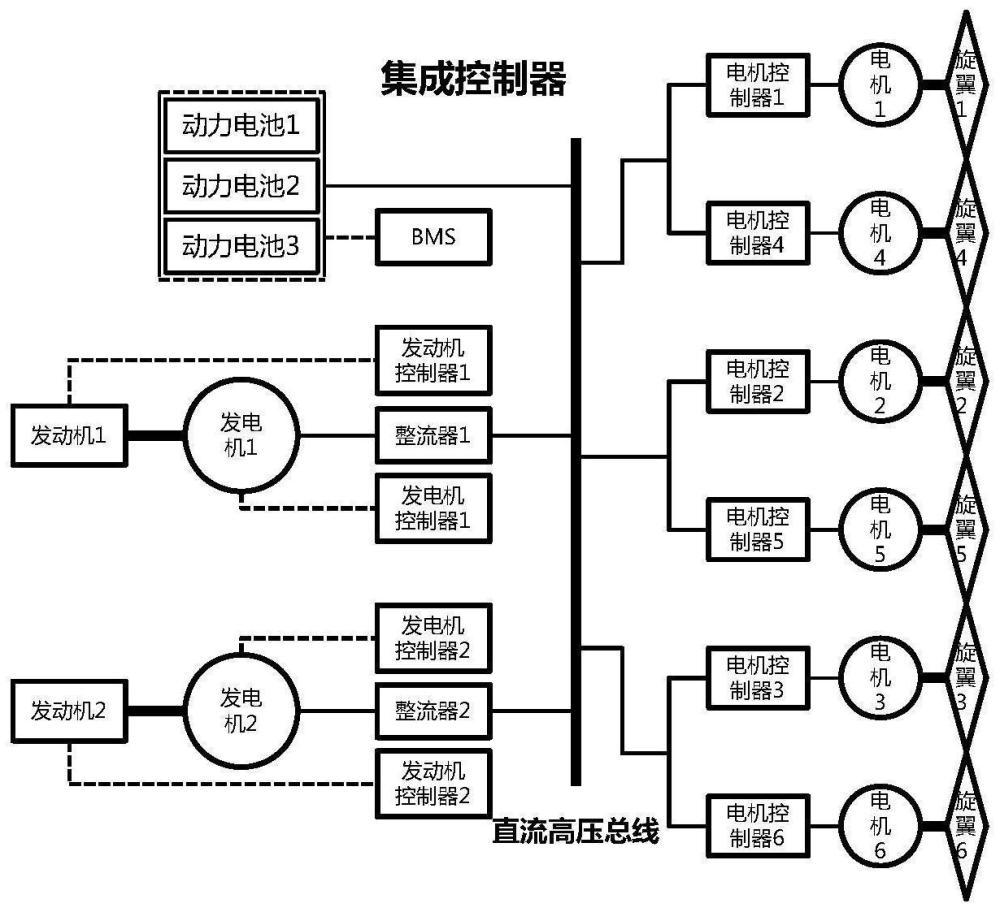
2、本发明的技术方案:一种分布式多桨垂直起降飞行器混合动力系统,包括混合动力电源系统、分布式电机-旋翼推进器、能量管理集成控制系统;所述混合动力电源系统包括两个及以上发电模块、储能模块;每个发电模块包括发动机、起发一体发电机、整流器;所述发动机与起发一体发电机之间共轴机械连接,所述起发一体发电机的输出端电连接到所述整流器输入端,所述发动机与起发一体发电机采用紧凑共壳一体化结构设计,并共用一套冷却系统和润滑系统;所述储能模块包含m套动力电池或超级电容,所述分布式电机-旋翼推进器包括2m个电机-旋翼对,每个电机-旋翼对包括电机控制器、电机、旋翼;电机控制器与电机电连接,电机旋转轴与旋翼直接刚性连接;所述两个及以上发电模块和储能模块并联电连接,并通过高压直流总线连接所述电机控制器;所述能量管理集成控制系统对分布式多桨垂直起降固定翼飞行器混合动力系统进行控制。
3、所述发动机配有发动机控制器。
4、所述启发一体发电机配有启发一体发电机控制器。
5、所述的分布式多桨垂直起降飞行器混合动力系统的能量管理方法,根据飞行模式和油门踏板信号确定总需求功率ptotal,并根据ptotal与储能模块最大输出功率psto,,max之间的相对大小确定发电模块的总输出功率pgen,进而根据发电模块的总输出功率pgen确定各个发电模块的输出功率pgen,i,根据各个发电模块的输出功率pgen,i确定所述发动机和起发一体发电机的功率;所述发动机控制器和启发一体发电机根据其目标输出功率确定所述发动机和起发一体发电机效率最优转速和扭矩。
6、所述的分布式多桨垂直起降飞行器混合动力系统的能量管理方法,在起飞阶段,油门踏板达到满行程的90%,此时总需求功率ptotal大于储能模块最大输出功率psto,max,储能模块以最大输出功率psto,max进行功率输出,发电模块全部起动,发电模块的总输出功率pgen=ptotal-psto,max,各个发电模块的输出功率pgen,i=pgen/n,n为发电模块的数量,n≥2,各个发电模块的输出功率达到其输出功率峰值;所述发动机控制器和启发一体发电机控制器根据各个发电模块的输出功率pgen,i确定发动机和起发一体发电机效率最优的转速和扭矩;
7、所述的分布式多桨垂直起降飞行器混合动力系统的能量管理方法,在悬停和降落阶段,油门踏板达到满行程的70%,此时总需求功率ptotal大于储能模块最大输出功率psto,max,储能模块以最大输出功率psto,max进行功率输出,发电模块全部起动,发电模块的总输出功率pgen=ptotal-psto,max,各个发电模块的输出功率pgen,i=pgen/n,所述发动机控制器和启发一体发电机控制器根据各个发电模块的输出功率pgen,i确定发动机和起发一体发电机效率最优的转速和扭矩;
8、所述的分布式多桨垂直起降飞行器混合动力系统的能量管理方法,在巡航加速阶段,油门踏板达到满行程的40%,此时总需求功率ptotal小于储能模块最大输出功率psto,max,储能模块以输出功率为零,发电模块的总输出功率pgen=ptotal,当pgen/n小于各个发电模块的额定输出功率pgen,0时,前m个发电模块的输出功率为额定输出功率pgen,0,其中m满足0<pgen-m·pgen,0<pgen,0,且m+1<n;第m+1个发电模块的输出功率为pgen-m*pgen,0,其余发电模块停机;所述发动机控制器和启发一体发电机控制器根据各个发电模块的输出功率pgen,i确定发动机和起发一体发电机效率最优的转速和扭矩;
9、所述的分布式多桨垂直起降飞行器混合动力系统的能量管理方法,在匀速巡航阶段,油门踏板达到满行程的20%,此时总需求功率ptotal小于储能模块最大输出功率psto,max,储能模块以输出功率为零,采用单个发电模块以额定功率进行功率输出,pgen,i=pgen,0,其余发电模块停机,此时pgen,0>ptotal,发电模块同时为储能模块充电,直至电池soc达到80%以上时,停止充电;所述发动机控制器和启发一体发电机控制器根据该发电模块的输出功率pgen,i确定发动机和起发一体发电机效率最优的转速和扭矩;
10、所述的分布式多桨垂直起降飞行器混合动力系统的能量管理方法,在紧急或单发失效情况下,特别是在巡航阶段处于工作状态的发电模块发生故障并失效的情况下,由所述能量管理模块接收处于工作状态的所述发电模块的故障信号,发出立即断开此发电模块并停机的指令,同时发出连接所述储能模块的指令,暂时由连接所述储能模块为推进系统供电,并启动相邻发电模块,待相邻发电模块以额定功率稳定工作后,接入直流母线,为推进系统供电,并为电池充电;所述发动机控制器和启发一体发电机控制器根据该发电模块的输出功率pgen,i确定发动机和起发一体发电机效率最优的转速和扭矩。
11、所述起发一体发电机,在电动模式时,由所述储能模块为其供电,带动所述发动机转动,进而起动该发动机;在发电模式时,由所述发动机带动所述起发一体发电机转动进行发电。
12、本发明的有益效果为:采用带有储能模块和多个发电模块的混合动力系统,能实现分布式多桨垂直起降飞行器长航时飞行,在起降、悬停和加速前飞时采用多个发电模块同时运行满足功率需求,降低了储能系统功率需求,从而减小混合动力系统质量,增加燃油储量,进而增大了续航时间和航程,并在一定程度上增加了飞行器飞行安全性。
- 还没有人留言评论。精彩留言会获得点赞!