悬吊机器人、抓取设备、翻转方法和使用方法与流程
本公开涉及飞行器,尤其涉及一种悬吊机器人、抓取设备、翻转方法和使用方法。
背景技术:
1、目前市场上存在各种悬吊应用场景,包括吊车设备吊装,高空作业等,而在实际应用中由于悬吊机器人运动时传导的惯性或者大风影响,在作业中经常会遇到被吊物晃动的场景,严重时可能会发生被吊物体滑出第一吊绳,砸坏周边设施等问题。
技术实现思路
1、有鉴于此,本公开的目的在于提出一种悬吊机器人及抓取设备,有效缓解了悬吊过程中被吊物晃动的问题。
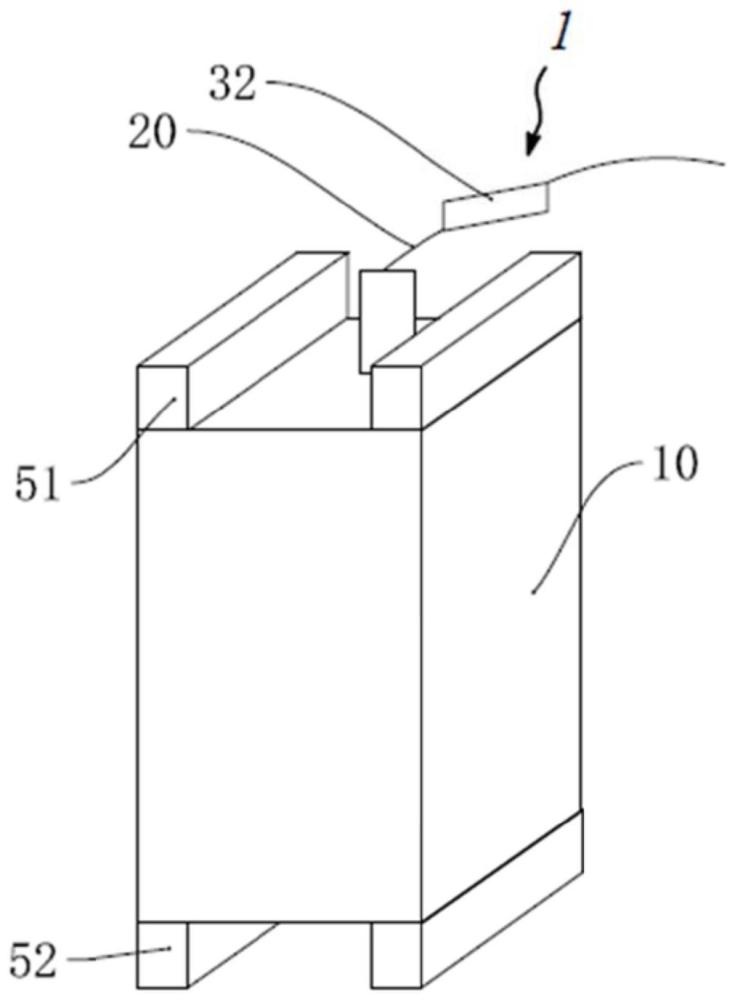
2、基于上述目的,本公开提供了一种悬吊机器人,包括主体;第一吊绳,所述主体垂吊连接在所述第一吊绳的末端;传感组件,所述传感组件检测所述第一吊绳与第一竖直方向之间的倾斜角度和所述第一吊绳的扭转角度;控制组件,所述控制组件根据传感组件的检测数据,计算所述主体的变化回归角度和变化扭转角度,使所述主体向初始位置和初始方向摆正;平衡转动组件,所述平衡转动组件控制所述主体向摆正方向转动所述变化扭转角度;平衡摆动组件,所述平衡摆动组件控制所述主体向摆正摆动所述变化回归角度。
3、可选的,所述平衡转动组件包括:平衡轮,所述平衡轮的轴线与所述主体的第二竖直方向的中心线共线;动力源件,所述动力源件驱动所述平衡轮转动,所述平衡轮的转动方向与所述变化扭转角度的方向相反。
4、可选的,所述主体具有悬吊状态;所述平衡摆动组件包括:第一风机和第二风机,在所述悬吊状态下,所述第一风机和所述第二风机分别位于靠近所述第一吊绳的一端和远离所述第一吊绳的一端,且所述第一风机和所述第二风机的吹风路径分别朝向所述第二竖直方向的一侧或两侧。
5、可选的,所述主体还具有飞行状态,在所述飞行状态下,所述第一风机和所述第二风机分别位于靠近所述第一吊绳的一端和远离所述第一吊绳的一端,且所述第一风机和所述第二风机的吹风路径朝向所述第一竖直方向的下端。
6、可选的,所述传感组件还包括:第二imu传感器,所述第二imu传感器设于所述第一吊绳上,用于检测所述第一吊绳的扭转角度和第一吊绳的倾斜角度。
7、可选的,在所述垂吊状态下,所述第一风机位于靠近所述第一吊绳的一端,所述第二风机位于远离所述第一吊绳的一端,在所述传感组件检测到所述倾斜角度大于零时,所述第一风机朝向所述第二竖直方向的风量小于所述第二风机朝向所述第二竖直方向的风量。
8、可选的,在所述垂吊状态下,所述第一风机位于靠近所述第一吊绳的一端,所述第二风机位于远离所述第一吊绳的一端,在所述传感组件检测到所述倾斜角度大于零时,所述第一风机朝向第二竖直方向的风量大于所述第二风机背向所述第二竖直方向的风量。
9、可选的,所述第一风机包括第一子风机和/或第二子风机;所述第二风机包括第一子风机和/或第二子风机。
10、可选的,所述第二imu传感器位于所述第一吊绳的末端或始端。
11、可选的,还包括翻转组件,所述翻转组件包括:滑轨,所述滑轨由所述主体的端面延伸至所述主体的侧面,所述第一吊绳的末端具有滑座,所述滑座卡合在所述滑轨中。
12、可选的,所述翻转组件还包括:驱动件和感应件,所述感应件用于接收切换所述悬吊状态和所述飞行状态的指令,所述驱动件驱动所述滑座在所述滑轨中滑动,以使所述主体翻转。
13、可选的,还包括:供电系统,所述供电系统与所述平衡转动组件和平衡摆动组件电连接;所述供电系统包括:电缆,所述电缆沿所述第一吊绳延伸至所述主体内部。
14、可选的,所述主体中与所述第一吊绳连接的端面为弧形结构。
15、本公开还提供了一种抓取设备,包括上述的悬吊机器人,飞行器,用于挂接所述第一吊绳的始端;抓取手,连接于所述悬吊机器人的底部。
16、可选的,抓取设备还包括:配重件和第二吊绳,所述第二吊绳的始端与所述飞行器连接,所述第二吊绳的末端与所述配重件连接;所述配重件还包括定位钩,用于与所述抓取手连接或分离。
17、本公开还提供了一种抓取设备的抓取方法,应用于上述的抓取设备上;方法包括:所述抓取手连接所述定位钩,所述飞行器悬吊所述悬吊机器人和所述配重件,所述第二吊绳拉紧;所述飞行器带动悬吊机器人和所述配重件飞行至被吊物的可吊范围内;所述飞行器下降,所述配重件停滞在地面上,所述第二吊绳松弛;所述悬吊机器人进入飞行状态,所述抓取手与所述定位钩分离,所述悬吊机器人飞行至被吊物上部,所述抓取手抓取被吊物;所述飞行器增加飞行高度,直至所述第一吊绳和所述第二吊绳拉紧后,飞行至被吊物目的地。
18、本公开还提供了一种悬吊机器人的翻转方法,应用于上述悬吊机器人中,包括:在所述悬吊机器人在悬吊状态时,所述第一吊绳连接于所述主体的上端;所述主体的上端的第一风机向所述主体的一侧吹风,所述主体的下端的第二风机向所述主体的另一侧吹风,使所述主体的两端翻转90度;所述悬吊机器人进入到飞行状态。
19、可选的,所述主体的上端的第一风机向所述主体的一侧吹风,所述主体的下端的第二风机向所述主体的另一侧吹风之后,还包括:当所述主体的翻转方向为顺时针方向时,所述悬吊机器人进入到飞行状态时,所述第一风机吹风朝向翻转至向下侧吹风。
20、可选的,所述主体的上端的第一风机向所述主体的一侧吹风,所述主体的下端的第二风机向所述主体的另一侧吹风之后,还包括:当所述主体的翻转方向为逆时针方向时,所述悬吊机器人进入到飞行状态时,所述第一风机吹风朝向翻转至向下侧吹风。
21、本公开还提供了一种悬吊机器人的使用方法,应用于上述悬吊机器人中,包括:所述第一风机和所述第二风机向一侧吹风,其中,吹风推力为f,吹风时间t;
22、计算第一风机和第二风机的推力f和吹风时间t:
23、f=k*sinθ;k=mv2/r+mg*cosθ;t=mv/f;
24、其中,m为所述主体与被吊物的重量,v为所述悬吊机器人急刹前,所述主体和被吊物垂直于所述第一竖直方向的速度;θ为第一吊绳与所述第一竖直方向之间的夹角;k为所述第一吊绳的拉力;g为重力加速度。
25、从上面所述可以看出,本公开提供的一种悬吊机器人,在被吊物倾斜时,利用传感组件检测其倾斜角度和第一吊绳的扭转的角度,再利用平衡转动组件使第一吊绳向原位扭转,利用平衡摆动组件使主体回归到第一竖直方向处,平衡因被吊物惯性而产生的晃动,减少晃动幅度,提高悬吊稳定性。
技术特征:
1.一种悬吊机器人,其特征在于,包括:
2.根据权利要求1所述的悬吊机器人,其特征在于,所述平衡转动组件包括:
3.根据权利要求1所述的悬吊机器人,其特征在于,传感组件包括:
4.根据权利要求1所述的悬吊机器人,其特征在于,所述主体具有悬吊状态;所述平衡摆动组件包括:
5.根据权利要求4所述的悬吊机器人,其特征在于,所述主体还具有飞行状态,在所述飞行状态下,所述第一风机和所述第二风机分别位于靠近所述第一吊绳的一端和远离所述第一吊绳的一端,且所述第一风机和所述第二风机的吹风路径朝向所述第一竖直方向的下端。
6.根据权利要求1所述的悬吊机器人,其特征在于,所述传感组件还包括:
7.根据权利要求4所述的悬吊机器人,其特征在于,在所述垂吊状态下,所述第一风机位于靠近所述第一吊绳的一端,所述第二风机位于远离所述第一吊绳的一端,在所述传感组件检测到所述倾斜角度大于零时,所述第一风机朝向所述第二竖直方向的风量小于所述第二风机朝向所述第二竖直方向的风量。
8.根据权利要求4所述的悬吊机器人,其特征在于,在所述垂吊状态下,所述第一风机位于靠近所述第一吊绳的一端,所述第二风机位于远离所述第一吊绳的一端,在所述传感组件检测到所述倾斜角度大于零时,所述第一风机朝向第二竖直方向的风量大于所述第二风机背向所述第二竖直方向的风量。
9.根据权利要求4所述的悬吊机器人,其特征在于,所述第一风机包括第一子风机和/或第二子风机;所述第二风机包括第一子风机和/或第二子风机。
10.根据权利要求6所述的悬吊机器人,其特征在于,所述第二imu传感器位于所述第一吊绳的末端或始端。
11.根据权利要求5所述的悬吊机器人,其特征在于,还包括翻转组件,所述翻转组件包括:
12.根据权利要求11所述的悬吊机器人,其特征在于,所述翻转组件还包括:
13.根据权利要求1的所述的悬吊机器人,其特征在于,还包括:
14.根据权利要求1所述的悬吊机器人,其特征在于,所述主体中与所述第一吊绳连接的端面为弧形结构。
15.一种抓取设备,其特征在于,包括:
16.根据权利要求15所述的抓取设备,其特征在于,还包括:
17.一种抓取设备的抓取方法,其特征在于,应用于如权利要求16所述的抓取设备上,所述方法包括:
18.一种悬吊机器人的翻转方法,其特征在于,应用于如权利要求4-12任一项所述的悬吊机器人中,包括:
19.根据权利要求18所述的悬吊机器人的翻转方法,其特征在于,所述主体的上端的第一风机向所述主体的一侧吹风,所述主体的下端的第二风机向所述主体的另一侧吹风之后,还包括:
20.根据权利要求18所述的悬吊机器人的翻转方法,其特征在于,所述主体的上端的第一风机向所述主体的一侧吹风,所述主体的下端的第二风机向所述主体的另一侧吹风之后,还包括:
21.一种悬吊机器人的使用方法,其特征在于,应用于如权利要求4-12任一项所述的悬吊机器人中,包括:
技术总结
本公开提供一种悬吊机器人、抓取设备、翻转方法和使用方法,其中悬吊机器人包括:主体;第一吊绳,主体垂吊连接在第一吊绳的末端;传感组件,传感组件检测主体与第一竖直方向之间的倾斜角度和第一吊绳的扭转角度;控制组件,控制组件根据传感组件的检测数据,计算主体的变化回归角度和变化扭转角度,使主体向初始位置和初始方向摆正;平衡转动组件,平衡转动组件控制主体向摆正方向转动变化扭转角度;平衡摆动组件,平衡摆动组件控制主体向摆正方向摆动变化回归角度。利用平衡转动组件使第一吊绳向原位扭转,利用平衡摆动组件使主体回归到第一竖直方向处,平衡因被吊物惯性而产生的晃动,减少晃动幅度,提高悬吊稳定性。
技术研发人员:胡天波,王海滨
受保护的技术使用者:星逻智能科技(苏州)有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!