飞行参数确定方法、装置、飞行器及计算机可读存储介质与流程
本申请涉及飞行器,具体涉及一种飞行参数确定方法、装置、飞行器及计算机可读存储介质。
背景技术:
1、飞行器(flight vehicle)是能够在大气层内或大气层外空间(太空)飞行的器械。飞行器在飞行的过程中可能由于各种原因无法收到外界信号,如外界信号被屏蔽、外界信号被干扰等。在飞行器无法收到外界信号的情况下,为了保证飞行器的稳定飞行,需要确定飞行器的飞行高度和垂向速度。
2、可以通过测量大气静压来确定飞行器的当前气压高度,进而可以根据当前气压高度确定飞行器的飞行高度和垂向速度。然而,在飞行器飞行过程中会对周围气流产生扰动,导致测量得到的飞行器的当前气压高度不准确,以致确定的飞行器的飞行高度和垂向速度准确性较低。
技术实现思路
1、本申请实施例公开一种飞行参数确定方法、装置、飞行器及计算机可读存储介质,用于提高确定的飞行器的飞行高度和垂向速度的准确性。
2、第一方面,本申请实施例公开了一种飞行参数确定方法,所述方法应用于飞行器,所述飞行器包括n个旋翼和n个旋翼电机,所述n个旋翼与所述n个旋翼电机一一对应,n为大于1的整数,所述方法包括:
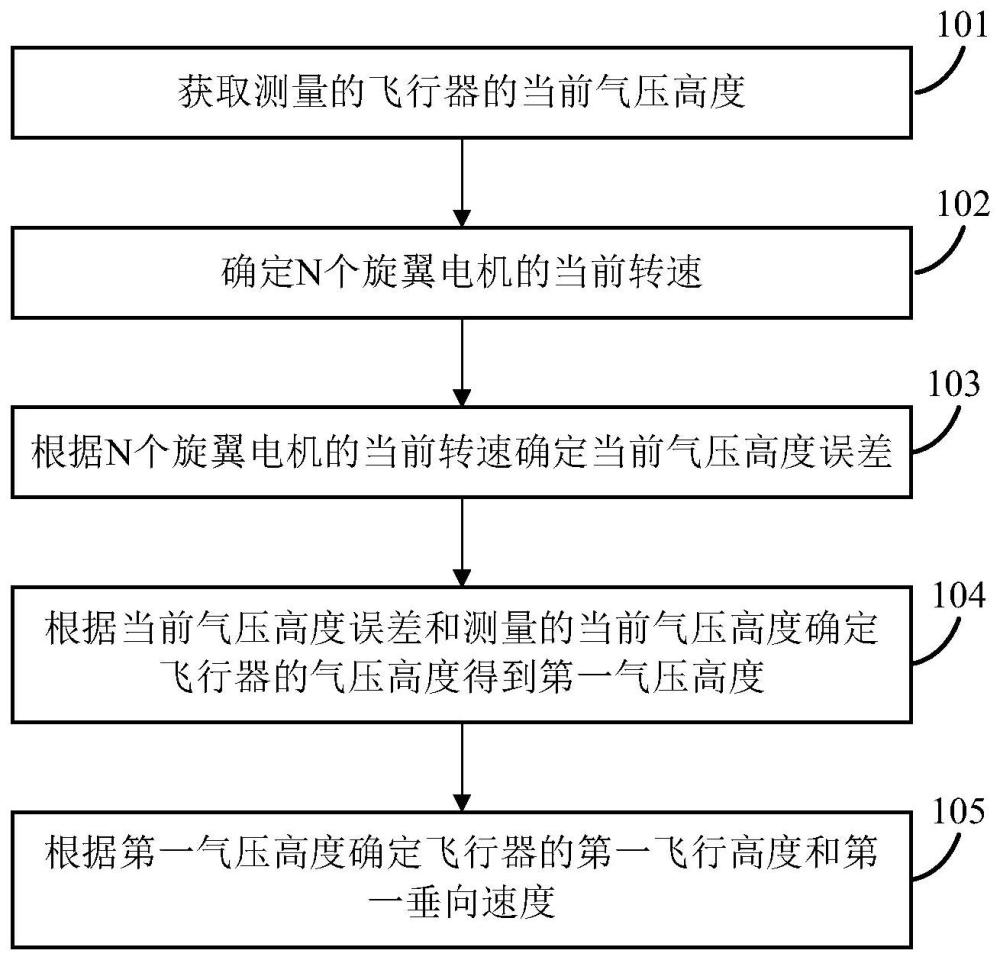
3、获取测量的所述飞行器的当前气压高度;
4、确定所述n个旋翼电机的当前转速;
5、根据所述当前转速确定当前气压高度误差;
6、根据所述当前气压高度误差和所述当前气压高度确定所述飞行器的气压高度,得到第一气压高度;
7、根据所述第一气压高度确定所述飞行器的第一飞行高度和第一垂向速度。
8、第二方面,本申请实施例公开了一种飞行参数确定装置,所述装置应用于飞行器,所述飞行器包括n个旋翼和n个旋翼电机,所述n个旋翼与所述n个旋翼电机一一对应,n为大于1的整数,所述装置包括:
9、获取单元,用于获取测量的所述飞行器的当前气压高度;
10、第一确定单元,用于确定所述n个旋翼电机的当前转速;
11、第二确定单元,用于根据所述当前转速确定当前气压高度误差;
12、第三确定单元,用于根据所述当前气压高度误差和所述当前气压高度确定所述飞行器的气压高度,得到第一气压高度;
13、第四确定单元,用于根据所述第一气压高度确定所述飞行器的第一飞行高度和第一垂向速度。
14、作为一种可能的实施方式,所述第一确定单元,具体用于在所述飞行器的当前飞行状态为水平飞行的情况下,确定所述n个旋翼电机的当前转速。
15、作为一种可能的实施方式,所述装置还包括:
16、第五确定单元,用于在所述飞行器的当前飞行状态为非水平飞行的情况下,根据所述当前气压高度确定所述飞行器的第一飞行高度和第一垂向速度。
17、作为一种可能的实施方式,所述第四确定单元具体用于:
18、根据所述第一气压高度确定所述飞行器的第一飞行高度;
19、根据所述第一飞行高度和第二飞行高度,确定所述飞行器的第一垂向速度,所述第二飞行高度为确定的上一时刻所述飞行器的飞行高度。
20、作为一种可能的实施方式,所述第四确定单元根据所述第一气压高度确定所述飞行器的第一飞行高度包括:
21、在所述飞行器的上一时刻飞行状态为非水平飞行的情况下,对所述第一气压高度和第二气压高度进行平滑处理,得到第三气压高度,所述第二气压高度为测量的上一时刻所述飞行器的气压高度;
22、根据所述第三气压高度确定所述飞行器的第一飞行高度。
23、作为一种可能的实施方式,所述装置还包括:
24、解算单元,用于根据所述当前气压高度,使用惯性测量单元imu进行捷联解算,得到所述飞行器的第三飞行高度和第二垂向速度;
25、第六确定单元,用于根据所述第一飞行高度和所述第三飞行高度,确定所述飞行器的第三飞行高度;
26、所述第六确定单元,还用于根据所述第一垂向速度和所述第二垂向速度,确定所述飞行器的第三垂向速度。
27、作为一种可能的实施方式,所述第二确定单元,具体用于根据第一函数关系确定所述当前转速对应的当前气压高度误差,所述第一函数关系为所述n个旋翼电机的转速与气压高度误差之间的函数关系。
28、作为一种可能的实施方式,所述装置还包括:
29、第七确定单元,用于确定所述n个旋翼电机的转速与所述飞行器的拉力之间的函数关系,得到第二函数关系;
30、所述第七确定单元,还用于确定所述拉力与所述飞行器的水平方向相对空气气流的相对速度之间的函数关系,得到第三函数关系;
31、所述第七确定单元,还用于确定气压高度误差与所述相对速度之间的函数关系,得到第四函数关系;
32、所述第七确定单元,还用于根据所述第二函数关系、所述第三函数关系和所述第四函数关系,确定所述第一函数关系。
33、第三方面,本申请实施例公开了一种飞行器,包括处理器和存储器,所述处理器用于调用所述存储器中存储的计算机程序执行第一方面公开的方法。
34、第四方面,本申请实施例公开了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序或计算机指令,当该计算机程序或计算机指令被处理器运行时,实现如上述第一方面公开的方法。
35、第五方面,本申请实施例公开了一种计算机程序产品,该计算机程序产品包括计算机程序代码,当该计算机程序代码被处理器运行时,使得上述方法被执行。
36、本申请实施例中,飞行器获取测量的飞行器的当前气压高度,确定n个旋翼电机的当前转速,根据n个旋翼电机的当前转速确定当前气压高度误差,根据当前气压高度误差和飞行器的当前气压高度确定飞行器的气压高度得到第一气压高度,根据第一气压高度确定飞行器的第一飞行高度和第一垂向速度。可见,先确定当前气压高度误差,之后使用当前气压高度误差对测量的气压高度进行补偿,最后使用补偿后的气压高度确定飞行器的飞行高度和垂向速度,由于使用当前气压高度误差对测量的气压高度进行了补偿,因此,可以提高确定的气压高度的准确性,进而可以提高确定的飞行器的飞行高度和垂向速度的准确性。此外,由于气压高度误差根据旋翼电机的当前转速确定,可以保证能够准确地确定旋翼电机的不同转速对应的气压高度误差,可以提高确定的气压高度误差的准确性,进行可以提高确定的飞行器的飞行高度和垂向速度的准确性。
技术特征:
1.一种飞行参数确定方法,其特征在于,所述方法应用于飞行器,所述飞行器包括n个旋翼和n个旋翼电机,所述n个旋翼与所述n个旋翼电机一一对应,n为大于1的整数,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述确定所述n个旋翼电机的当前转速包括:
3.根据权利要求2所述的方法,其特征在于,所述方法还包括:
4.根据权利要求2所述的方法,其特征在于,所述根据所述第一气压高度确定所述飞行器的第一飞行高度和第一垂向速度包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述第一气压高度确定所述飞行器的第一飞行高度包括:
6.根据权利要求1-5任一项所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1-5任一项所述的方法,其特征在于,所述根据所述当前转速确定当前气压高度误差包括:
8.根据权利要求7所述的方法,其特征在于,所述方法还包括:
9.一种飞行参数确定装置,其特征在于,所述装置应用于飞行器,所述飞行器包括n个旋翼和n个旋翼电机,所述n个旋翼与所述n个旋翼电机一一对应,n为大于1的整数,所述装置包括:
10.一种飞行器,其特征在于,包括处理器和存储器,所述处理器用于调用所述存储器中存储的计算机程序实现如权利要求1-8任一项所述的方法。
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序或计算机指令,当所述计算机程序或计算机指令被处理器运行时,实现如权利要求1-8任一项所述的方法。
技术总结
本申请公开了一种飞行参数确定方法、装置、飞行器及计算机可读存储介质,该方法应用于飞行器,飞行器包括N个旋翼和N个旋翼电机,N个旋翼与N个旋翼电机一一对应,N为大于1的整数,该方法包括:获取测量的飞行器的当前气压高度,确定N个旋翼电机的当前转速,根据N个旋翼电机的当前转速确定当前气压高度误差,根据当前气压高度误差和飞行器的当前气压高度确定飞行器的气压高度得到第一气压高度,根据第一气压高度确定飞行器的第一飞行高度和第一垂向速度。本申请实施例中,由于使用当前气压高度误差对测量的气压高度进行了补偿,因此,可以提高确定的气压高度的准确性,进而可以提高确定的飞行器的飞行高度和垂向速度的准确性。
技术研发人员:谭浩,陶永康,孙宾姿,张明明,方玮,陈雪峰
受保护的技术使用者:广东汇天航空航天科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!