使用电推进的半自主轨道维持任务规划方法及系统与流程
本发明涉及卫星自主任务规划领域,具体地,涉及一种使用电推进的半自主轨道维持任务规划方法及系统。
背景技术:
1、随着航天活动越来越频繁,卫星星座发射往往要求一箭多星发射,对卫星的单星重量提出了严格的要求;同时对卫星寿命的要求也越来越长,传统的化学推进需要装填更多的燃料来满足长寿命要求。为提升卫星载重比,满足长寿命和一箭多星的发射需求,电推进逐渐成为卫星首选项。和化学推进相比,电推进比冲高,但推力小、功耗大,需要多圈、多次启动才能实现轨道维持任务。单纯通过地面控制,工作量大,占用测控资源多,需要设计星上自主的轨道维持任务规划功能。
2、在公开号为cn201710179460.9的中国专利文献中,公开了一种低轨遥感卫星自主轨道控制方法,无需考虑多次、多轨问题和任务冲突问题,不适用于基于电推进的长时轨道维持。
3、在公开号为cn201610898405.0的中国专利文献中,公开了一种基于化学推力器的轨道维持控制方法,该方法基于半长轴的偏差,通过单次推力器开启实现轨道提升,和电推进控制策略相比差别较大。
4、在公开号为cn201510836995.x的中国专利文献中,公开了一种同步轨道电推进维持保持与角动量卸载联合控制方法,设计了适用于待角度调节机构的多台电推力器自主轨道维持计算方法,该方法中各推力器控制时长、点火位置需要根据卫星状态实时求解,计算量大,对计算资源紧张、能源消耗大的卫星来说不适用。
5、在公开号为cn201410190625.9的中国专利文献中,公开了一种电推进静止轨道卫星的位置保持方法,公开了使用四个推力器实现轨道轨道倾角、偏心率和平经度漂移率控制的控制方法,该方法设计中未考虑能源约束和任务冲突约束,适用于高轨道能源充足、地面有实时遥测的卫星,不适用于低轨道卫星光照阴影切换、测控弧段的情况。
6、刘奇等在论文《一种低轨星座高精度相位保持方法》(宇航学报,2021,42(11))公开了一种基于极限环的高精度相位保持技术,能够实现卫星轨道高度和偏心率的控制,但需要估计大气阻力对卫星轨道高度的影响,从而得到纬度幅角和半长轴变化的对应关系。同时,论文中未给出能源受限情况的电推轨道维持规划策略。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种使用电推进的半自主轨道维持任务规划方法及系统。
2、根据本发明提供的一种使用电推进的半自主轨道维持任务规划方法,包括:在地面启动自主轨道维持任务规划后,星上自主计算推力器工作总时长、工作次数以及每次工作的星时,生成连续多轨的轨道维持任务序列,插入到整星的任务队列中,按照时间依次执行。
3、优选地,所述方法包括以下步骤:
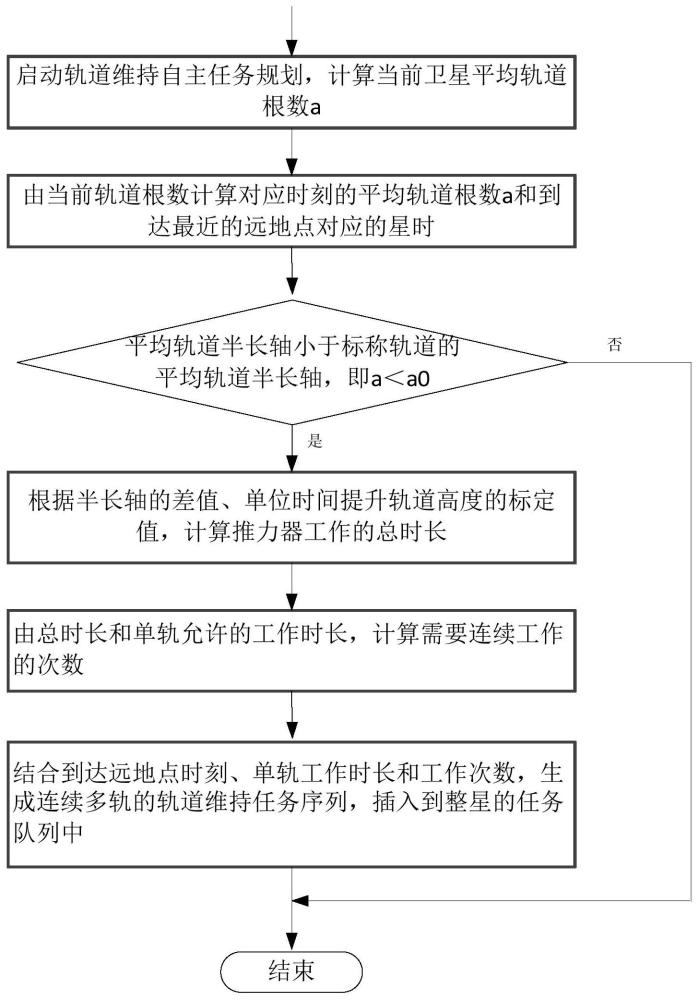
4、步骤s1:当地面上注指令启动星上自主轨道维持任务规划后,根据当前轨道根数计算对应时刻的平均轨道根数,并递推得到最近一次的到达远地点的星时;
5、步骤s2:计算当前时刻的轨道平半长轴和标称轨道平半长轴的差值,结合卫星质量和电推力器特性得到的单位时间提升的轨道高度值,两者相除向上取整得到喷气总时长;
6、步骤s3:根据卫星能源计算允许的电推单轨工作的时长;
7、步骤s4:根据喷气总时长和单轨允许的工作时长,计算得到电推进需要工作的次数;
8、步骤s5:根据最近远地点时刻和电推进工作的次数、单轨工作的时长,生成连续多轨的轨道维持任务序列,插入到整星的任务队列中。
9、优选地,所述步骤s1中,计算得到当前时刻的平均轨道根数,计算最近依次到达远近点的星时的表达式如下:
10、
11、其中:t0为当前轨道根数对应的星时,单位s;
12、ug为地心引力常数,为3.98600436×1014m3/s2;
13、a、m分别为当前时刻的轨道平均半长轴和平近点角,单位分别为m,rad。
14、优选地,所述步骤s2中,计算喷气总时长的表达式如下:
15、
16、其中:a0,a分别为标称轨道半长轴和当前轨道的平均半长轴,单位m;
17、h0为每次轨道控制相对于标称轨道的上抬升量,单位m;
18、hc为地面根据推力器推力、比冲以及卫星质量标定的单位时间能够抬升的轨道高度,单位(m/s)。
19、优选地,所述步骤s3中,地面依据星上蓄电池容量、太阳翼面积、卫星平台功耗、电推进工作的功耗、卫星轨道的光照和地影时间,计算得到允许的电推力器单轨工作的最大时长tc。
20、优选地,所述步骤s4中,
21、根据推力器工作总时长和单轨允许的工作时间,计算得到推力器工作的次数:
22、
23、其中:ngate为允许连续开启的次数。
24、优选地,根据卫星整个寿命期间需要提升的轨道高度和单次工作时间,计算得到卫星整个寿命周期内,用于轨道维持的电推力器开关的总次数的表达式为:
25、
26、其中:(x,y,z)分别为太阳活动高年、中年、低年对应的轨道高度衰减值,单位m;(l1,l2,l3)分别为卫星整个设计寿命内太阳活动高年、中年、低年的次数。
27、优选地,所述步骤s5中,生成的轨道维持序列如下:
28、t1-tc/2~t1+tc/2:第1次点火;
29、t2-tc/2~t2+tc/2:第2次点火;
30、t3-tc/2~t3+tc/2:第3次点火;
31、tn-tc/2~tn+tc/2:第n次点火。
32、其中:t1=ta,为最近依次轨道远地点对应的星时;
33、t2=t1+m×t为第2次点火对应的中间星时;
34、t3=t2+m×t为第3次点火对应的中间星时;
35、tn=tn-1+m×t为第n次点火对应的中间星时;
36、t为轨道周期,有
37、m为两次相邻点火需要间隔的轨道圈数,跟卫星能源平衡相关。
38、优选地,基于电推进轨道维持过程的能源平衡,将自主生成的电推进任务插入整星的任务队列时需要对地面上注、自主规划的电推进任务和业务任务进行冲突判断;
39、判断规则包括:
40、-电推任务前、后各k轨道周期内无成像、数传、其他轨道维持任务,则插入指令队列;
41、-若前、后k轨道周期内有其他的业务或者轨道维持任务,则抛弃当前任务。
42、根据本发明提供的一种使用电推进的半自主轨道维持任务规划系统,包括:
43、模块m1:当地面上注指令启动星上自主轨道维持任务规划后,根据当前轨道根数计算对应时刻的平均轨道根数,并递推得到最近一次的到达远地点的星时;
44、模块m2:计算当前时刻的轨道平半长轴和标称轨道平半长轴的差值,结合卫星质量和电推力器特性得到的单位时间提升的轨道高度值,两者相除向上取整得到喷气总时长;
45、模块m3:根据卫星能源计算允许的电推单轨工作的时长;
46、模块m4:根据喷气总时长和单轨允许的工作时长,计算得到电推进需要工作的次数;
47、模块m5:根据最近远地点时刻和电推进工作的次数、单轨工作的时长,生成连续多轨的轨道维持任务序列,插入到整星的任务队列中。
48、与现有技术相比,本发明具有如下的有益效果:
49、1、本发明在地面启动任务后,星上自主规划基于电推进的轨道维持任务,减少地面任务规划和上注的工作量。
50、2、本发明在一次任务规划过程计算一次远地点和轨道周期,减小星上计算量。
- 还没有人留言评论。精彩留言会获得点赞!