一种水上无人机及水下探测器投放和回收方法与流程
本发明涉及水上无人机领域,具体地,涉及一种水上无人机及水下探测器投放和回收方法。
背景技术:
1、随着我国不断推进海洋战略,对海洋资源也日益重视,海洋探测活动也越来越多,无人机与水下探测器可以分别从空中和水下对海洋洋流、海浪变化、水下环境等方面进行侦察和监测。无人机具有成本低、通用性强、巡航时间长、飞行范围广、机动灵活等优点,可以快速抵达目标区域对用户所需要的数据进行采集。
2、水下探测是近年来兴起的应用领域,通常采用水下探测器在未知海域对水下生物、地形进行探测,对一些水下声呐、电缆、海上平台等设备进行监测等。过去利用舰船进行投放和回收水下探测器往往需要较长的时间周期以及更高的成本,其响应速度不如无人机,并且在一些极端海况条件下航行时,往往会使船员面临安全风险。
3、现有技术中与无人机结合机械臂的现有技术1为:cn201720479971.8,该现有技术存在的问题是:搭载机械臂较长,占据了起落架的位置,在飞行时产生较大气动阻力;多旋翼飞行器无法在海面进行漂浮,必须保持在空中悬停,消耗大量电能。
4、现有技术2为:申请号为cn201711225664.8的公开专利申请,该现有技术存在的问题是:不能够在海面垂直起降,海浪起伏大,无人机滑跑起降过程中,海水面对机体产生巨大冲击,容易破环机体结构;该技术通过变构型潜入水下进行探测,不能实现在一个区域内布置多个探测器同时进行多点探测,探测效率有限。
5、现有技术3为:申请号为cn202011098858.8的公开专利申请,该现有技术存在的问题是:通过涵道倾转可实现多旋翼模式垂直起降飞行,但不能以固定翼模式飞行,飞行过程中消耗较大电能,飞行航程和续航时间不如固定翼模式飞行;通过自身下潜探测,其回收问题没有考虑,一旦电量耗尽则无法返回。
技术实现思路
1、本发明的目的是将水上无人机与水下探测器结合,使得水下探测器的投放和回收实现无人化安全操作,以及将水上无人机与水下探测器的结合进行优化设计。
2、为实现上述发明目的,本发明提供了一种水上无人机,所述水上无人机包括:
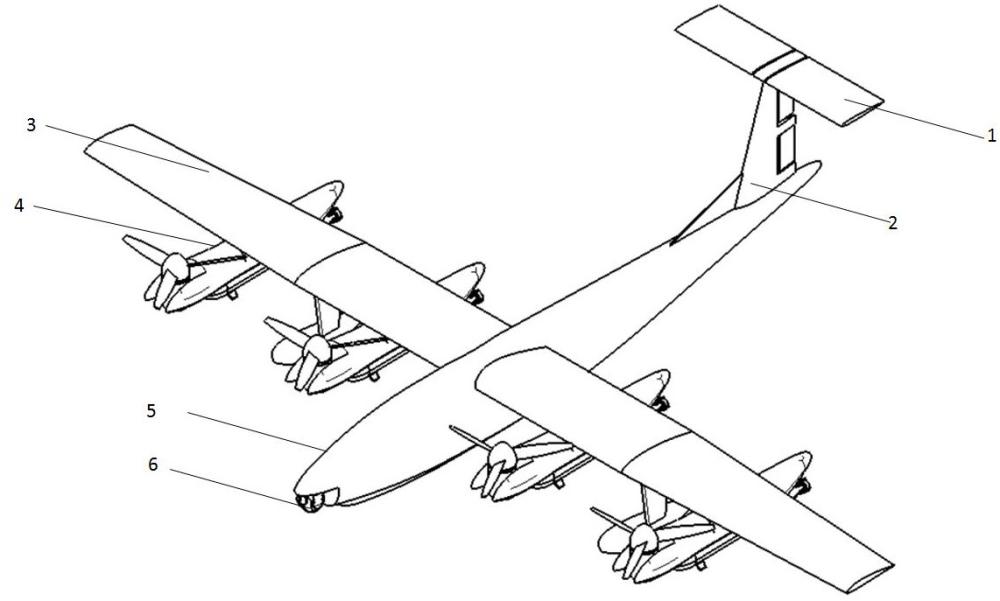
3、机身和固定在机身两侧的机翼,其中,机身下表面固定有浮筒,机身尾部固定有垂直尾翼,垂直尾翼上可转动地连接有水平尾翼,两侧机翼下方对称固定有至少一个电机舱,电机及螺旋桨可转动地安装在电机舱前方,每个电机舱均安装有一可折叠收纳于电机舱内以及可展开伸出电机舱外的机械臂,机械臂上安装有用于投放和回收水下探测器的夹取机构。
4、其中,本发明在电机舱设计了机械臂,通过机械臂上安装的夹取机构可以实现水下探测器的投放和回收,利用机械臂可折叠收纳于电机舱内以及可展开伸出电机舱外,实现了在飞行时将机械臂和水下探测器收回,不干扰水上无人机的正常飞行,在飞行后伸出投放水下探测器,实现了水下探测器的无人投放和回收操作,提高了安全性,本发明中的水上无人机搭载机械臂对水下探测器进行投放和回收可以克服现有技术中的安全性问题,水上无人机通过机械臂将探测器收纳于机身内,携带到指定位置进行投放,通过基于视觉的目标监测系统,可以出色地完成对探测器的投放和抓取工作,替代人驾驶船只到未知海域进行作业,减少了安全事故的发生。
5、且本方法对水上无人机与水下探测器的结合进行优化设计,具体为将机械臂和水下无人机收纳在电机舱内,能够不影响无人机机体结构和内部设备安装,并且均是对称设计满足水上无人机的重心配置,并且飞行时这些设备都是收纳在电机舱内不增加气动阻力,由于没有对浮筒进行影响,因此本发明中的机械臂和水下探测器也不影响水上无人机在水面漂浮,使得水上无人机能够正常工作,且实现了水下探测器的投放和回收兼顾。
6、在一些实施例中,所述机械臂包括:
7、第一关节电机、第二关节电机、第一连杆、第三关节电机、第二连杆、第四关节电机、第三连杆和第五关节电机;
8、其中,第一关节电机固定于电机舱内,第二关节电机与第一关节电机可转动连接,第二关节电机的转轴伸出与第一连杆的一端可转动连接,第二关节电机用于控制第一连杆的偏转,第一连杆的另一端安装有第三关节电机,第三关节电机的转轴伸出与第二连杆的一端可转动连接,第三关节电机用于控制第二连杆的偏转,第二连杆的另一端装有第四关节电机,第四关节电机的转轴伸出与第三连杆的一端可转动连接,第四关节电机用于控制第三连杆的偏转,第三连杆的另一端装有第五关节电机,第五关节电机的转轴伸出与夹取机构可转动连接。
9、其中,为了便于投放和收回水下探测器,本发明对机械臂进行了设计改造,设计为右多个转动连接的关节电机驱动和多节连杆组成,实现了机械臂能够伸缩和调整角度,便于在飞行时收回至电机舱内,以及在投放和回收水下探测器时伸出电机舱,其中,第一关节电机固定于电机舱内实现了与电机舱的固定连接受力,通过第二关节电机、第三关节电机和第四关节电机实现了第一连杆、第二连杆和第三连杆的偏转角度的多节调整,便于准确的控制机械臂的伸出长度和角度,第五关节电机的转轴伸出与夹取机构可转动连接,通过第五关节电机的转动便于控制夹取机构的夹取位置和角度。
10、在一些实施例中,垂直尾翼后侧装有滑流舵和方向舵。滑流舵可以左右偏转以抵消水平尾翼旋转产生的反扭距,方向舵偏转以控制水上无人机的运动方向。
11、在一些实施例中,水平尾翼包括左翼和右翼,左翼与右翼之间的角度可差动或联动调节,使得水平尾翼可以调节为正/负攻角,水平尾翼采用对称翼型(其相同正负攻角下产生的力大小一致),绕水平尾翼中轴旋转后产生俯仰力矩,用来配平无人机俯仰姿态。
12、在一些实施例中,所述水上无人机的机翼上安装有4个电机舱。设置多个电机舱可以便于一次携带多个水下探测器,实现多个水下探测器的投放和回收,提高效率。
13、在一些实施例中,夹取机构末端内部设有线圈,水下探测器机身上部设有铁磁性结构的对接装置。利用线圈通电产生磁力对对接装置进行吸附,利用线圈断电磁力消失实现于对接装置分离,通过磁力吸附的方式便于对接且不容易损伤水下探测器。
14、在一些实施例中,机身头部搭载光电吊舱用于对海面环境及海上目标进行感知和识别,利用光电吊舱可以便于对水下探测器进行识别进行回收或识别到障碍物或危险进行躲避。
15、为实现上述发明目的,本发明还提供了一种基于所述的一种水上无人机的水下探测器投放和回收方法,所述方法包括:
16、步骤1:水上无人机将电机及螺旋桨调整为水平朝前,水上无人机进入固定翼飞行模式,然后飞行至指定海域上方;
17、步骤2:水上无人机将电机及螺旋桨朝上转动,使得电机及螺旋桨与水平方向的夹角为90度,水平尾翼的左翼与右翼上下差动偏转,左翼与右翼绕各自的中心轴旋转,滑流舵偏转抵消反扭距,水上无人机进入多旋翼飞行模式,垂直降落于海面指定位置,螺旋桨及水平尾翼停止转动;
18、步骤3:水上无人机漂浮于海面,机械臂转动将水下探测器移动至海面,机械臂释放水下探测器,水下探测器潜入水中开始工作;
19、步骤4:机械臂转动收入电机舱中,螺旋桨及水平尾翼开始转动,水上无人机以多旋翼飞行模式从海面垂直起飞至海面上方悬停,电机及螺旋桨调整为水平朝前,水平尾翼转动减速并与垂直尾翼锁止,滑流舵偏转回0度中立位置,水上无人机进入固定翼飞行模式;
20、步骤5:水上无人机以固定翼飞行模式平飞回到预设地点进行降落;
21、步骤6:水下探测器工作结束后上浮至海面,向预设终端发出无线电信号,报告所在位置并发出回收信号;
22、步骤7:水上无人机以固定翼飞行模式飞行至水下探测器所在海域,检测并锁定水下探测器的位置,然后切换至多旋翼飞行模式并垂直降落于水下探测器所在位置;
23、步骤8:水上无人机在漂浮状态下调整水上无人机位置和姿态移动至水下探测器上方;
24、步骤9:机械臂从电机舱内伸出夹取水下探测器,夹取后机械臂折叠收纳于电机舱内;
25、步骤10:水上无人机以多旋翼飞行模式从海面垂直起飞,飞至海面上空后切换至固定翼飞行模式平飞返回至预设地点。
26、其中,通过上述方法实现了水上无人机与水下探测器的有效结合,实现了水下探测器的高效且安全的投放与回收。
27、在一些实施例中,水上无人机通过光电吊舱检测海面,识别海面的水下探测器,并锁定海面的水下探测器目标。
28、在一些实施例中,机械臂从电机舱内伸出并在光电吊舱的引导下夹取水下探测器。
29、其中,利用光电吊舱可以对水下探测器进行识别和定位,方便对水下探测器进行回收。
30、在一些实施例中,水上无人机在漂浮状态下通过改变电机机座角度和螺旋桨转速来控制水上无人机位置和姿态。水上无人机降落在海面后,由于海水的流动,水上无人机与水下探测器的位置可能没有对准,无法进行抓取操作,通过改变电机机座角度和螺旋桨转速来控制水上无人机位置和姿态,实现水上无人机机械臂与水下探测器的对准,便于进行抓取操作。
31、本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
32、本发明将水上无人机与水下探测器结合,使得水下探测器的投放和回收实现无人化安全操作,以及将水上无人机与水下探测器的结合进行优化设计。
33、本发明中的水上无人机搭载多个水下探测器,通过可折叠的机械臂将其收于电机舱的下方,有效利用空间,降低气动阻力,减少气动干扰。
34、本发明中的水上无人机采用可倾转动力和旋转尾翼设计,实现在水面的垂直起降功能,能够漂浮于海面进行移动,更稳定地投放和夹取回收水下探测器,并可从多旋翼模式切换至固定翼模式,实现从垂直起降状态到平飞状态的过渡。
- 还没有人留言评论。精彩留言会获得点赞!