一种电动拖机轮的制作方法
本发明涉及拖机,具体涉及一种电动拖机轮。
背景技术:
1、直升机起落架的主要有轮式和滑橇式两种型式。通常,轮式起落架的直升机在进行地面短途运输或临时转场时,可通过动力牵引车直接运输,而滑橇式起落架的直升机由于自身结构特点,必须通过拖机轮或地面运输车才能实现地面短途运输功能。
2、目前小型直升机大多用分离式拖机轮,该形式拖机轮使用过程至少需要两名人员配合操作,一名操作人员通过撬棍利用杠杆原理将直升机托起,而后另一名操作人员安装拖机轮,使用极其不便,并且使用过程中撬棍一旦不慎脱手,后果不堪设想。
3、为此,带有动力举升装置的拖机轮应运而生。这些拖机轮或用液压千斤顶或用机械式千斤顶作为拖机轮的举升动力源,但其最大的缺陷就是:只完成拖机轮“举升”这一动作,而“转运”这个过程依然靠人力来完成,费时费力,无法实现自动化工作,大大降低了工作效率,特别是战时阶段,时间就是生命,要做到“争分夺秒、提前部署、尽早实施”。为此,提供一种不依赖人力、可自动调节平衡位置、转向平稳且含模块化举升装置的新型电动拖机轮具有重要意义。
技术实现思路
1、基于背景技术的问题,本发明提出一种电动拖机轮,不依赖人力、可自动调节平衡位置、转向平稳且含模块化举升装置,提高了工作效率,实现便捷式外场维护和运输。
2、实现本发明目的的技术解决方案为:
3、一种电动拖机轮,包括模块式举升装置、操纵控制系统、动力运转装置及独立悬挂系统,其中:
4、所述模块式举升装置用于举升被运输的直升机;
5、所述操纵控制系统与遥控数据终端通信,控制举升装置进行直升机举升,控制动力运转装置进行前进、后退、加减速、制动及转向;
6、所述动力运转装置用于为拖机轮提供动力,驱动预转轮转动;
7、所述独立悬挂系统用于减少直升机在运输过程中的颠簸、震动和倾斜。
8、进一步地,所述模块式举升装置包括滑橇卡口、举升臂、电动推杆、连接架、直线滑轨以及连接背板,所述连接背板的两侧面设有直线滑轨,每侧的直线滑轨均连接举升臂一端,举升臂另一端与滑橇卡口顶部连接,所述滑橇卡口用于连接固定起落架,所述举升臂的中部通过连接架与电动推杆输出端连接,电动推杆底端与操纵控制系统两侧固定连接,在电动推杆作动下,举升臂沿直线滑轨上下滑动。
9、进一步地,所述滑橇卡口为模块化构件,根据起落架滑橇锁定形式的不同进行模块化定制与更换。
10、进一步地,所述滑橇卡口包括提钩式锁定、滑槽式锁定以及插销式锁定。
11、进一步地,所述举升臂上设有多个牵引孔,当所述操纵控制系统暂停或失效后,做为拖机轮与地面牵引车配合使用。
12、进一步地,所述操纵控制系统每侧的电动推杆为2个,安装在连接架的两端,连接架的中部与举升臂连接。
13、进一步地,所述操纵控制系统包括操纵控制总成、独立悬挂接口、第一驱动电池及第二驱动电池;所述独立悬挂接口安装在操纵控制总成的两侧,用于和独立悬挂系统连接,所述第一驱动电池及第二驱动电池安装在操纵控制总成上方,所述第一驱动电池及第二驱动电池为操纵控制总成供电,所述操纵控制总成包括举升运动控制模块、运转轮转动控制模块、第一数据交互无线通信模块和第二数据交互无线通信模块;所述操纵控制总成通过第一数据交互无线通信模块与遥控数据终端通信,通过第二数据交互无线通信模块与其他拖机轮通信,所述举升运动控制模块用于控制模块式举升装置,所述运转轮转动控制模块用于控制动力运转装置。
14、进一步地,所述操纵控制总成还包括用于电动推杆手动操作的按键。
15、进一步地,所述动力运转装置左右对称分布两组轮系,每组轮系包括地面运输轮、轮毂电机和轮毂端盖,所述轮毂电机内嵌于地面运输轮,轮毂端盖安装在轮毂电机中心处外侧。
16、进一步地,所述独立悬挂系统包括制动器、悬挂杆系、减震器及连接件,所述制动器通过连接件固连在垂直于地面的悬挂杆系上,减震器两端分别以万向铰方式与连接背板和悬挂杆系铰接,悬挂杆系通过轴与独立悬挂接口连接。
17、与现有技术相比,本发明有益效果在于:有效的将电动举升装置、轮毂电机和独立悬挂结合在一起,实现拖机轮的完整功能。不但可以适应大多数滑橇式直升机,而且系统冗余度高、安全裕度较大,无需人力推直升机即可实现地面短途运输功能,而且重量相对较轻,两侧的独立悬挂机构能够减少直升机转运过程受到的冲击,提高了车轮的地面附着力,减少直升机本身的倾斜和震动。
技术特征:
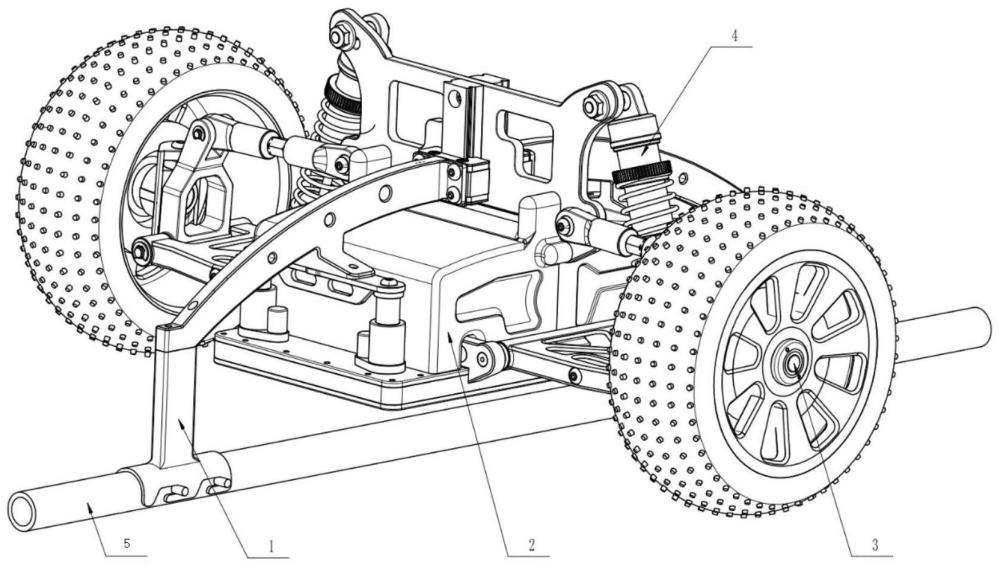
1.一种电动拖机轮,其特征在于,包括模块式举升装置(1)、操纵控制系统(2)、动力运转装置(3)及独立悬挂系统(4),其中:
2.根据权利要求1所述的一种电动拖机轮,其特征在于,所述模块式举升装置(1)包括滑橇卡口(1.1)、举升臂(1.2)、电动推杆(1.3)、连接架(1.4)、直线滑轨(1.5)以及连接背板(1.6),所述连接背板(1.6)的两侧面设有直线滑轨(1.5),每侧的直线滑轨(1.5)均连接举升臂(1.2)一端,举升臂(1.2)另一端与滑橇卡口(1.1)顶部连接,所述滑橇卡口(1.1)用于连接固定起落架(5),所述举升臂(1.2)的中部通过连接架(1.4)与电动推杆(1.3)输出端连接,电动推杆(1.3)底端与操纵控制系统(2)两侧固定连接,在电动推杆(1.3)作动下,举升臂(1.2)沿直线滑轨(1.5)上下滑动。
3.根据权利要求2所述的一种电动拖机轮,其特征在于,所述滑橇卡口(1.1)为模块化构件,根据起落架滑橇锁定形式的不同进行模块化定制与更换。
4.根据权利要求3所述的一种电动拖机轮,其特征在于,所述滑橇卡口(1.1)包括提钩式锁定(1.1.1)、滑槽式锁定(1.1.2)以及插销式锁定(1.1.3)。
5.根据权利要求2所述的一种电动拖机轮,其特征在于,所述举升臂(1.2)上设有多个牵引孔,当所述操纵控制系统(2)暂停或失效后,做为拖机轮与地面牵引车配合使用。
6.根据权利要求2所述的一种电动拖机轮,其特征在于,所述操纵控制系统(2)每侧的电动推杆(1.3)为2个,安装在连接架(1.4)的两端,连接架(1.4)的中部与举升臂(1.2)连接。
7.根据权利要求2所述的一种电动拖机轮,其特征在于,所述操纵控制系统(2)包括操纵控制总成(2.1)、独立悬挂接口(2.2)、第一驱动电池(2.3)及第二驱动电池(2.4);所述独立悬挂接口(2.2)安装在操纵控制总成(2.1)的两侧,用于和独立悬挂系统(4)连接,所述第一驱动电池(2.3)及第二驱动电池(2.4)安装在操纵控制总成(2.1)上方,所述第一驱动电池(2.3)及第二驱动电池(2.4)为操纵控制总成(2.1)供电,所述操纵控制总成(2.1)包括举升运动控制模块、运转轮转动控制模块、第一数据交互无线通信模块和第二数据交互无线通信模块;所述操纵控制总成(2.1)通过第一数据交互无线通信模块与遥控数据终端通信,通过第二数据交互无线通信模块与其他拖机轮通信,所述举升运动控制模块用于控制模块式举升装置,所述运转轮转动控制模块用于控制动力运转装置。
8.根据权利要求7所述的一种电动拖机轮,其特征在于,所述操纵控制总成(2.1)还包括用于电动推杆(1.3)手动操作的按键。
9.根据权利要求1所述的一种电动拖机轮,其特征在于,所述动力运转装置(3)左右对称分布两组轮系,每组轮系包括地面运输轮(3.1)、轮毂电机(3.2)和轮毂端盖(3.3),所述轮毂电机(3.2)内嵌于地面运输轮(3.1),轮毂端盖(3.3)安装在轮毂电机(3.2)中心处外侧。
10.根据权利要求7所述的一种电动拖机轮,其特征在于,所述独立悬挂系统(4)包括制动器(4.1)、悬挂杆系(4.2)、减震器(4.3)及连接件,所述制动器(4.1)通过连接件固连在垂直于地面的悬挂杆系(4.2)上,减震器(4.3)两端分别以万向铰方式与连接背板(1.6)和悬挂杆系(4.2)铰接,悬挂杆系(4.2)通过轴与独立悬挂接口(2.2)连接。
技术总结
本发明公开了一种电动拖机轮,包括模块式举升装置、操纵控制系统、动力运转装置及独立悬挂系统,所述模块式举升装置用于举升被运输的直升机;所述操纵控制系统与遥控数据终端通信,控制举升装置进行直升机举升,控制动力运转装置进行前进、后退、加减速、制动及转向;所述动力运转装置用于为拖机轮提供动力,驱动预转轮转动;所述独立悬挂系统用于减少直升机在运输过程中的颠簸、震动和倾斜。本发明不依赖人力、可自动调节平衡位置、转向平稳且含模块化举升装置,提高了工作效率,实现便捷式外场维护和运输。
技术研发人员:付饶,张斌,殷贤树,李家春,王强,贺敏锐,黄健
受保护的技术使用者:中国人民解放军总参谋部第六十研究所
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!