一种双旋翼无人直升机用降落减速缓冲设备的制作方法
本技术涉及无人直升机降落减速缓冲领域,具体是一种双旋翼无人直升机用降落减速缓冲设备。
背景技术:
1、旋翼无人机-直升机,它的构造比较简单,价格也比较低廉,更为重要的是它根本不需要发射系统,还能垂直起降,更能自由悬停,而且飞行起来灵活性相当高超,可用各种速度、用各种飞行剖面的航路进行飞行,且随着科学技术的发展,无人机的种类较多,包括双旋翼无人直升机。
2、公开号为cn208530839u的一项中国专利公开了一种双旋翼无人直升机,属于无人机技术领域,其目的在于提高无人机直升机的载荷能力,改善旋翼系统工况,减少旋翼系统及伺服机构疲劳,增宽无人机的挂载重心。其包括机架、分别连接在机架两端的输出主轴,每组输出主轴均可在机架上绕输出主轴的轴线旋转,输出主轴的上端连接有旋翼;每组输出主轴上均设置有两组舵机,两组舵机分别位于输出主轴的左右两侧,每组舵机均通过第二连杆与套设在输出主轴上的倾斜盘下转子连接,倾斜盘上转子通过第一连杆与旋翼片连接,倾斜盘上转子、倾斜盘上转子通过轴承连接,并且套设在输出主轴上可以沿主轴自由滑动,也可以左右倾斜。
3、上述专利在使用中存在一些问题,比如无人直升机返程并落在在停放台上时,因无人直升机下降时无法精准控制对停放台施加的作用力,每次降落都会与停放台产生较大的撞击,长此以往,无人直升机因撞击造成部件松动或损坏,松动的部件会在无人直升机飞行时脱离,影响无人直升机的飞行,甚至因部件的脱离造成意外或事故的发生,因此,针对上述问题提出一种双旋翼无人直升机用降落减速缓冲设备。
技术实现思路
1、为了弥补现有技术的不足,现有无人直升机降落时与停放台产生撞击,造成部件松动或损坏问题,本实用新型提出一种双旋翼无人直升机用降落减速缓冲设备。
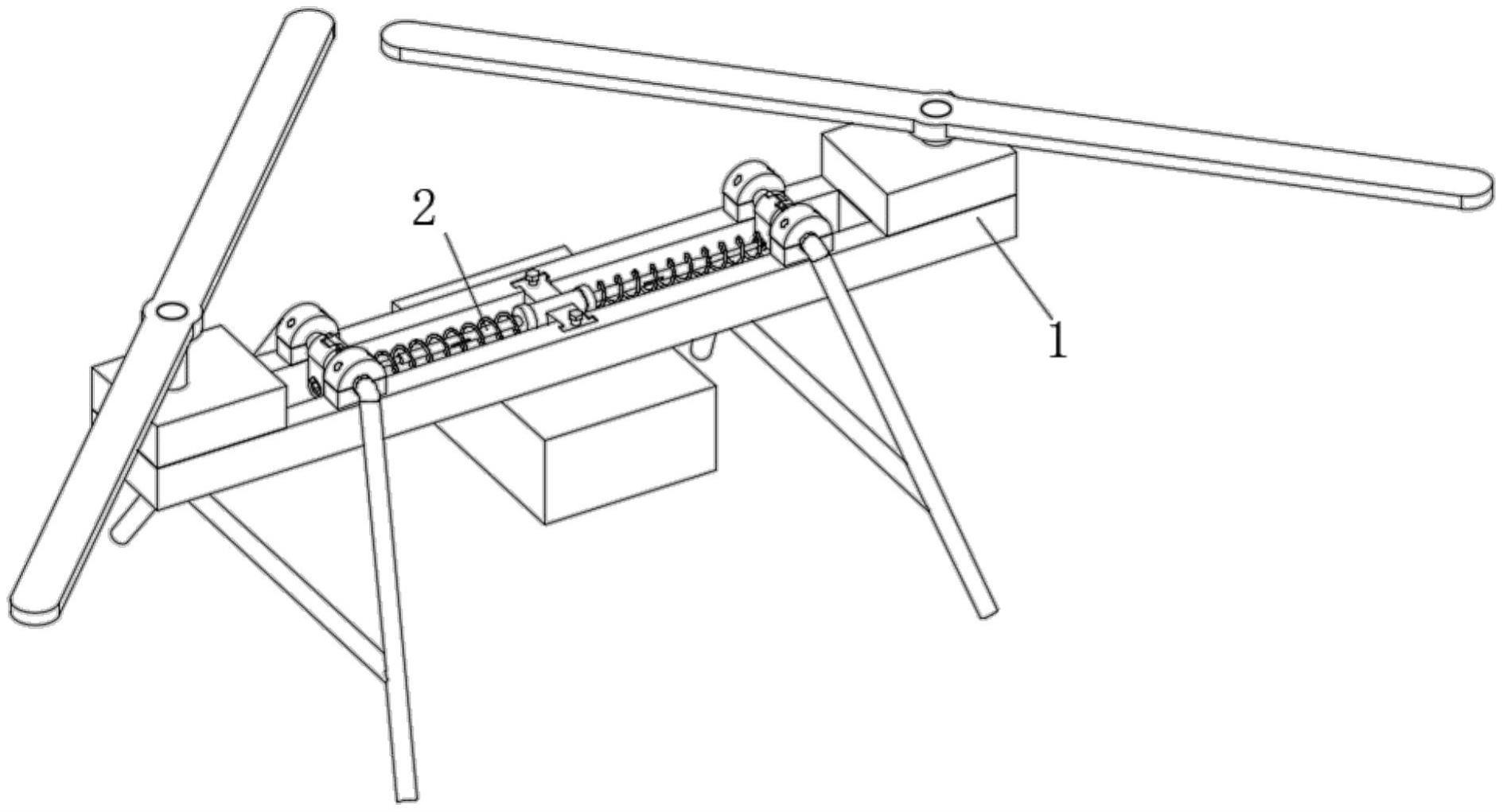
2、本实用新型解决其技术问题所采用的技术方案是:本实用新型所述的一种双旋翼无人直升机用降落减速缓冲设备,包括双旋翼无人直升机的横梁,还包括减速缓冲设备,减速缓冲设备包括第一缓冲组件,第一缓冲组件包括限制器件、两个连接弹簧、两个带动器件和两个支撑腿,两个支撑腿设置为梯形框架结构,支撑腿上水平段活动安装在横梁的上方,两个带动器件分别安装在两个支撑腿上水平段中部,限制器件中部位置与横梁活动连接,两个连接弹簧分别套设在限制器件的两端,连接弹簧的两端分别与限制器件和带动器件连接。
3、优选的,限制器件包括连接杆和两个对称放置在连接杆两侧的限制杆组,连接杆设置为哑铃形状。
4、优选的,限制杆组包括筒体、杆体和螺纹滑杆,筒体的侧壁开设有滑孔,杆体伸入筒体的端部开设有螺纹孔,螺纹滑杆螺纹贯穿螺纹孔放置,且螺纹滑杆的端部伸入滑孔内,筒体端部与连接杆固定连接,杆体的端部与带动器件连接。
5、优选的,第一缓冲组件包括连接器件,连接器件包括套管和两个对称安装在套管两侧的滑动卡板,套管套设在连接杆上,滑动卡板活动安装在横梁的滑动槽内。
6、优选的,支撑腿上水平段侧壁开设有卡槽,带动器件包括主板和旋动板,主板的上端和旋动板的上端通过连连接轴连接,主板和旋动板相互靠近的侧壁开设有弧形凹槽,弧形凹槽内侧壁固定连接有卡柱,支撑腿上水平段穿过两个弧形凹槽组成的空间,且卡柱安装在卡槽内。
7、一种双旋翼无人直升机用降落减速缓冲设备,包括双旋翼无人直升机的横梁,横梁上设置有两个支撑腿,两个支撑腿设置为梯形框架结构,还包括减速缓冲设备,减速缓冲设备包括第二缓冲组件,第二缓冲组件包括停放平台、电磁铁和连接板组,电磁铁设置为四个且均分为两组,连接板组设置为两个,每组两个电磁铁通过连接板组安装在支撑腿下水平段上,停放平台上设置有四个磁石,磁石与电磁铁一一正对。
8、优选的,连接板组包括两个对称设置的夹持板,夹持板设置为t型结构,夹持板竖直段开设有弧形槽,夹持板水平段开设有阶梯槽,支撑腿下水平段挤压穿过两个弧形槽组成的空间,电磁铁上端固定连接有连接柱,连接柱设置为t型结构,连接柱安装在两个阶梯槽组成的空间内。
9、本实用新型的有益之处在于:
10、1、本实用新型通过设置减速缓冲设备,以便通过其工作,改变现存的无人直升机撞击停放台停放的现状,使无人直升机缓慢停放,避免造成部件松动或损坏;
11、2、两个支撑腿呈外八型和连接弹簧的设置便于当无人直升机降落时,两个支撑腿上端的带动器件相互靠近并挤压连接弹簧,连接弹簧形变对支撑腿施加作用力使两个支撑腿上端缓慢靠近,实现无人直升机的缓慢下降,避免撞击停放台;
12、3、电磁铁和磁石的设置便于使电磁铁产生与磁石相斥的磁力,且根据无人直升机降落的高度,逐渐减小通过电磁铁的电流大小,即减小电磁铁的磁力,进而使无人直升机缓慢下落。
技术特征:
1.一种双旋翼无人直升机用降落减速缓冲设备,包括双旋翼无人直升机的横梁(1),其特征在于:还包括减速缓冲设备,所述减速缓冲设备包括第一缓冲组件(2),所述第一缓冲组件(2)包括限制器件(22)、两个连接弹簧(23)、两个带动器件(25)和两个支撑腿(24),两个所述支撑腿(24)设置为梯形框架结构,所述支撑腿(24)上水平段活动安装在横梁(1)的上方,两个所述带动器件(25)分别安装在两个支撑腿(24)上水平段中部,所述限制器件(22)中部位置与横梁(1)活动连接,两个所述连接弹簧(23)分别套设在限制器件(22)的两端,所述连接弹簧(23)的两端分别与限制器件(22)和带动器件(25)连接。
2.根据权利要求1所述的一种双旋翼无人直升机用降落减速缓冲设备,其特征在于:所述限制器件(22)包括连接杆(221)和两个对称放置在连接杆(221)两侧的限制杆组(222),所述连接杆(221)设置为哑铃形状。
3.根据权利要求2所述的一种双旋翼无人直升机用降落减速缓冲设备,其特征在于:所述限制杆组(222)包括筒体(2221)、杆体(2223)和螺纹滑杆(2225),所述筒体(2221)的侧壁开设有滑孔(2222),所述杆体(2223)伸入筒体(2221)的端部开设有螺纹孔(2224),所述螺纹滑杆(2225)螺纹贯穿螺纹孔(2224)放置,且所述螺纹滑杆(2225)的端部伸入滑孔(2222)内,所述筒体(2221)端部与连接杆(221)固定连接,所述杆体(2223)的端部与带动器件(25)活动连接。
4.根据权利要求3所述的一种双旋翼无人直升机用降落减速缓冲设备,其特征在于:所述第一缓冲组件(2)包括连接器件(21),所述连接器件(21)包括套管(211)和两个对称安装在套管(211)两侧的滑动卡板(212),所述套管(211)套设在连接杆(221)上,所述滑动卡板(212)活动安装在横梁(1)的滑动槽(11)内。
5.根据权利要求4所述的一种双旋翼无人直升机用降落减速缓冲设备,其特征在于:所述支撑腿(24)上水平段侧壁开设有卡槽(241),所述带动器件(25)包括主板(251)和旋动板(252),所述主板(251)的上端和旋动板(252)的上端通过连连接轴连接,所述主板(251)和旋动板(252)相互靠近的侧壁开设有弧形凹槽,所述弧形凹槽内侧壁固定连接有卡柱(253),所述支撑腿(24)上水平段穿过两个弧形凹槽组成的空间,且所述卡柱(253)安装在卡槽(241)内。
6.一种双旋翼无人直升机用降落减速缓冲设备,包括双旋翼无人直升机的横梁(1),其特征在于:所述横梁(1)上设置有两个支撑腿(24),两个所述支撑腿(24)设置为梯形框架结构,还包括减速缓冲设备,所述减速缓冲设备包括第二缓冲组件(3),所述第二缓冲组件(3)包括停放平台(33)、电磁铁(32)和连接板组(31),所述电磁铁(32)设置为四个且均分为两组,所述连接板组(31)设置为两个,每组两个所述电磁铁(32)通过连接板组(31)安装在支撑腿(24)下水平段上,所述停放平台(33)上设置有四个磁石(331),所述磁石(331)与电磁铁(32)一一正对。
7.根据权利要求6所述的一种双旋翼无人直升机用降落减速缓冲设备,其特征在于:所述连接板组(31)包括两个对称设置的夹持板(311),所述夹持板(311)设置为t型结构,所述夹持板(311)竖直段开设有弧形槽(313),所述夹持板(311)水平段开设有阶梯槽(312),所述支撑腿(24)下水平段挤压穿过两个弧形槽(313)组成的空间,所述电磁铁(32)上端固定连接有连接柱(321),所述连接柱(321)设置为t型结构,所述连接柱(321)安装在两个阶梯槽(312)组成的空间内。
技术总结
本技术属于无人直升机降落减速缓冲领域,具体是一种双旋翼无人直升机用降落减速缓冲设备,包括双旋翼无人直升机的横梁,还包括减速缓冲设备,所述减速缓冲设备包括第一缓冲组件,所述第一缓冲组件包括限制器件、两个连接弹簧、两个带动器件和两个支撑腿,两个所述支撑腿设置为梯形框架结构,所述支撑腿上水平段活动安装在横梁的上方,两个所述带动器件分别安装在两个支撑腿上水平段中部,所述限制器件中部位置与横梁活动连接,两个所述连接弹簧分别套设在限制器件的两端;通过设置减速缓冲设备,以便通过其工作,改变现存的无人直升机撞击停放台停放的现状,使无人直升机缓慢停放,避免造成部件松动或损坏。
技术研发人员:王桢,陈罗丹,程振元
受保护的技术使用者:星耀航空科技有限公司
技术研发日:20230601
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!