一种具有高机动性高可控性的三旋翼无人机
本技术属于无人机,具体涉及一种具有高机动性高可控性的三旋翼无人机。
背景技术:
1、旋翼机已经成为了无人机领域中一种非常常见的飞行器类型。在无人机的设计中,四旋翼是一种广泛采用的配置方案。四旋翼指的是具有四个独立旋转的旋翼,分布在飞行器的四个角落。每个旋翼通过调节转速和螺旋桨叶片的角度,以实现飞行控制。四旋翼设计在无人机领域中变得流行的原因是它具有许多优势。首先,四旋翼具有较高的稳定性和悬停能力。通过对四个旋翼进行智能调控,可以实现精确的悬停和操纵。其次,四旋翼在起降时不需要特定的起飞或降落跑道,因为它可以垂直起降,适应各种环境和场地。此外,四旋翼结构相对简单,容易维护和操作。这使得它成为广泛应用于航拍、物流配送、农业检测等领域的理想选择。
2、然而,随着无人机技术的不断发展和应用场景的多样化,对旋翼机的需求也在不断演变。一些应用场景对于更高的飞行效率和负载能力提出了要求。例如,一些长航时任务需要较大的续航能力,而一些携带重物的任务需要更高的负载能力。这就引出了对于新型旋翼机配置方案的探索。三旋翼是一种在无人机领域中逐渐受到关注的配置方案。它采用三个独立旋转的旋翼,分布在飞行器的三个角落。相较于四旋翼,三旋翼具有一些独特的优势。首先,三旋翼在效率方面有所提升。由于只有三个旋翼,相比四旋翼减少了一个旋翼,它能够减小气动阻力,提高飞行效率。其次,三旋翼的设计可以提供更高的负载能力,因为每个旋翼承担的负载更大。此外,三旋翼相比四旋翼还具有更好的机动性能。通过适当的控制策略,三旋翼可以实现更灵活、更敏捷的飞行动作,例如快速的加速、急转弯和高速飞行。此外,三旋翼还有助于减少整体飞行器的重量和复杂度。相比于四旋翼,三旋翼减少了一个旋翼和相关的传动系统,从而减少了飞行器的结构重量和维护成本。同时,由于减少了一个旋翼,三旋翼的气动布局也更加简洁,使得两个旋翼与机身之间的夹角增大,更便于安装视觉,雷达等各类传感器,以使得其能应用于更多需要智能化的场景。
3、然而,三旋翼本身的构型特点也决定了其难以具备与四旋翼相当的稳定性,由于只有三个旋翼提供升力,飞行器在垂直和横向方向上的稳定性可能会受到影响。三个旋翼也无法消反作用力矩,使得需要更复杂的控制算法和技术来实现稳定的飞行。其次,三旋翼的纠正能力也会较差,当一个旋翼受到外部扰动时,其他旋翼可以通过调整转速和推力来平衡飞行器,使其保持平稳飞行。相比之下,三旋翼无人机在受到扰动时可能更容易失去平衡,因为只有两个旋翼可以提供纠正力。除此之外,三旋翼不具备安全冗余性,若其中一个动力旋翼出现故障,无法依靠剩余的旋翼保持稳定并降落。
技术实现思路
1、本实用新型的目的是解决上述问题,提供一种推进效率高、稳定性好、操纵性好、抗干扰能力强的具有高机动性高可控性的三旋翼无人机。
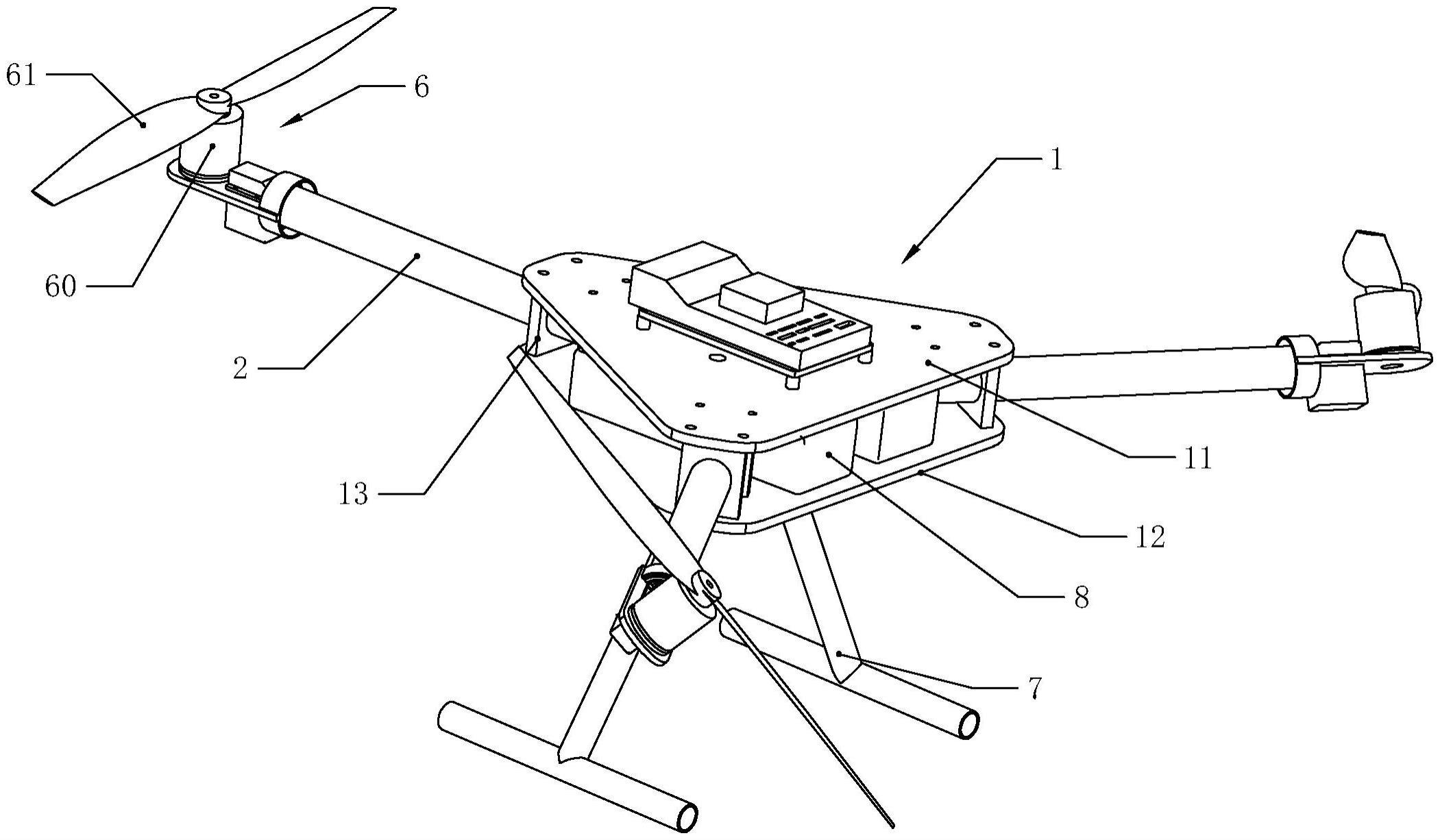
2、为解决上述技术问题,本实用新型的技术方案是:一种具有高机动性高可控性的三旋翼无人机,包括机架和机臂,机架上安装有机架连接件,机架通过机架连接件与机臂相连,机臂的数量为三且呈放射状均匀分布在机架上,机臂的端部安装有旋转机构和动力组,旋转机构带动动力组转动;机架内部安装有电池,机架的底部安装有起落架,电池分别与旋转机构和动力组电连接。
3、优选地,所述机架包括平行布置的上机架板和下机架板,机架连接件和电池均位于上机架板和下机架板之间,上机架板和下机架板结构相同,上机架板呈三角形结构,上机架板和下机架板上均设有机架板孔,螺钉穿过机架板孔分别与机架连接件和电池相连。
4、优选地,所述机架连接件包括两个互相平行布置的机架连接块,机架连接块为长方体结构,机架连接块的中间开设有机架连接块通孔,机臂穿设于机架连接块通孔,且机臂与机架连接块固连。
5、优选地,所述机臂为圆柱体的管状结构,机臂为碳纤维管。
6、优选地,所述旋转机构包括电机安装座、轴承、倾转舵机和固定片,轴承套设在机臂的端部且固连,固定片位于机臂内且与机臂固连,动力组安装在电机安装座的端部,电机安装座的另一端套设在轴承上,倾转舵机安装在电机安装座上,倾转舵机的输出轴与固定片固连,倾转舵机工作时自身旋转带动电机安装座转动,从而带动动力组转动。
7、优选地,所述电机安装座包括固连为一体的电机安装座板和电机安装座环,电机安装座环的截面为圆环状结构,电机安装座板上设有电机安装座通孔和电机安装座板槽,动力组安装在电机安装座通孔上,并通过连接件固连,倾转舵机安装在电机安装座板槽内并通过螺栓与电机安装座板固连,倾转舵机转轴的轴线与电机安装座环的轴线平行。
8、优选地,所述动力组包括动力电机和叶片,动力电机的电机端与电机安装座板固连,动力电机的转轴端与叶片相连,动力电机工作时驱动叶片转动。
9、优选地,所述相邻机臂之间的夹角为120°。
10、本实用新型的有益效果是:
11、1、本实用新型所提供的一种具有高机动性高可控性的三旋翼无人机,充分发挥三旋翼无人机的优势之处,同时解决了三旋翼无人机稳定性差,操纵性差,抗干扰能力差及容错性差的问题。
12、2、本实用新型通过在三个机臂上安装动力组,使得三旋翼无人机具备三组矢量拉力,矢量拉力的组合能充分解决反扭矩无法对消的问题,同时极大提高了三旋翼无人机的稳定性与机动性。动力组的设计也使得其容错能力提高,在其中一个旋翼故障时,依靠剩余倾转旋翼矢量组合,亦可保持无人机稳定并安全降落。
技术特征:
1.一种具有高机动性高可控性的三旋翼无人机,其特征在于:包括机架(1)和机臂(2),机架(1)上安装有机架连接件,机架(1)通过机架连接件与机臂(2)相连,机臂(2)的数量为三且呈放射状均匀分布在机架(1)上,机臂(2)的端部安装有旋转机构和动力组(6),旋转机构带动动力组(6)转动;机架(1)内部安装有电池(8),机架(1)的底部安装有起落架(7),电池(8)分别与旋转机构和动力组(6)电连接。
2.根据权利要求1所述的一种具有高机动性高可控性的三旋翼无人机,其特征在于:所述机架(1)包括平行布置的上机架板(11)和下机架板(12),机架连接件和电池(8)均位于上机架板(11)和下机架板(12)之间,上机架板(11)和下机架板(12)结构相同,上机架板(11)呈三角形结构,上机架板(11)和下机架板(12)上均设有机架板孔,螺钉穿过机架板孔分别与机架连接件和电池(8)相连。
3.根据权利要求1所述的一种具有高机动性高可控性的三旋翼无人机,其特征在于:所述机架连接件包括两个互相平行布置的机架连接块(13),机架连接块(13)为长方体结构,机架连接块(13)的中间开设有机架连接块通孔,机臂(2)穿设于机架连接块通孔,且机臂(2)与机架连接块(13)固连。
4.根据权利要求1所述的一种具有高机动性高可控性的三旋翼无人机,其特征在于:所述机臂(2)为圆柱体的管状结构,机臂(2)为碳纤维管。
5.根据权利要求1所述的一种具有高机动性高可控性的三旋翼无人机,其特征在于:所述旋转机构包括电机安装座(3)、轴承(4)、倾转舵机(5)和固定片(9),轴承(4)套设在机臂(2)的端部且固连,固定片(9)位于机臂(2)内且与机臂(2)固连,动力组(6)安装在电机安装座的端部,电机安装座(3)的另一端套设在轴承(4)上,倾转舵机(5)安装在电机安装座(3)上,倾转舵机(5)的输出轴与固定片(9)固连,倾转舵机(5)工作时自身旋转带动电机安装座(3)转动,从而带动动力组(6)转动。
6.根据权利要求5所述的一种具有高机动性高可控性的三旋翼无人机,其特征在于:所述电机安装座(3)包括固连为一体的电机安装座板(30)和电机安装座环(31),电机安装座环(31)的截面为圆环状结构,电机安装座板(30)上设有电机安装座通孔(301)和电机安装座板槽(302),动力组(6)安装在电机安装座通孔(301)上,并通过连接件固连,倾转舵机(5)安装在电机安装座板槽(302)内并通过螺栓与电机安装座板(30)固连,倾转舵机(5)转轴的轴线与电机安装座环(31)的轴线平行。
7.根据权利要求1所述的一种具有高机动性高可控性的三旋翼无人机,其特征在于:所述动力组(6)包括动力电机(60)和叶片(61),动力电机(60)的电机端与电机安装座板(30)固连,动力电机(60)的转轴端与叶片(61)相连,动力电机(60)工作时驱动叶片(61)转动。
8.根据权利要求1所述的一种具有高机动性高可控性的三旋翼无人机,其特征在于:所述相邻机臂(2)之间的夹角为120°。
技术总结
本技术公开了一种具有高机动性高可控性的三旋翼无人机,包括机架和机臂,机架上安装有机架连接件,机架通过机架连接件与机臂相连,机臂的数量为三且呈放射状均匀分布在机架上,机臂的端部安装有旋转机构和动力组,旋转机构带动动力组转动;机架内部安装有电池,机架的底部安装有起落架,电池分别与旋转机构和动力组电连接。本技术所提供的一种具有高机动性高可控性的三旋翼无人机,充分发挥三旋翼无人机的优势之处,同时解决了三旋翼无人机稳定性差,操纵性差,抗干扰能力差及容错性差的问题。
技术研发人员:祝洋,秦梓杰
受保护的技术使用者:西南交通大学
技术研发日:20230614
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!