一种轮腿混合式主动悬架和星球机器人漫步车
本技术涉及星球机器人漫步车,尤其涉及一种轮腿混合式主动悬架和星球机器人漫步车。
背景技术:
1、近年来,航天界再度掀起探月热潮。但月表环境恶劣,漫游车登陆后要面临结构松散且尖锐的月壤、跨过多石块砂砾、高低起伏断层地带,加之月球表面高达270℃的温差和低气压、低重力环境,这些都对漫游车设计提出了极大挑战。
2、其中,星球机器人漫步车的行走机构是在行星表面工作时间最长、工作环境最恶劣、载荷工况最复杂的机构,因此也是星球机器人漫步车在轨经常发生故障的机构。如美国的“勇气号”火星车轮采用整体开放性结构,它采用一块铝合金整体铸造加工技术,沟槽式履刺,保证轮子足够的牵引力、附着力和安全性,但由于车轮采用传统刚性结构,坚硬岩石面会对车轮产生很大作用力,使传统刚性车轮变形、变脆,最终导致其行驶性能下降。此外在遇到岩石托底地面时,现有的星球机器人漫步车由于障碍物的限制出现无法通过的状况,影响星球机器人漫步车的工作。
技术实现思路
1、本实用新型旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、鉴于此,本实用新型提供的一种轮腿混合式主动悬架和星球机器人漫步车,其中轮腿混合式主动悬架能够通过驱动件驱动车轮在径向上的转动,实现避障功能,保证星球机器人漫步车在星球上的工作效率。
3、具体而言,包括以下的技术方案:
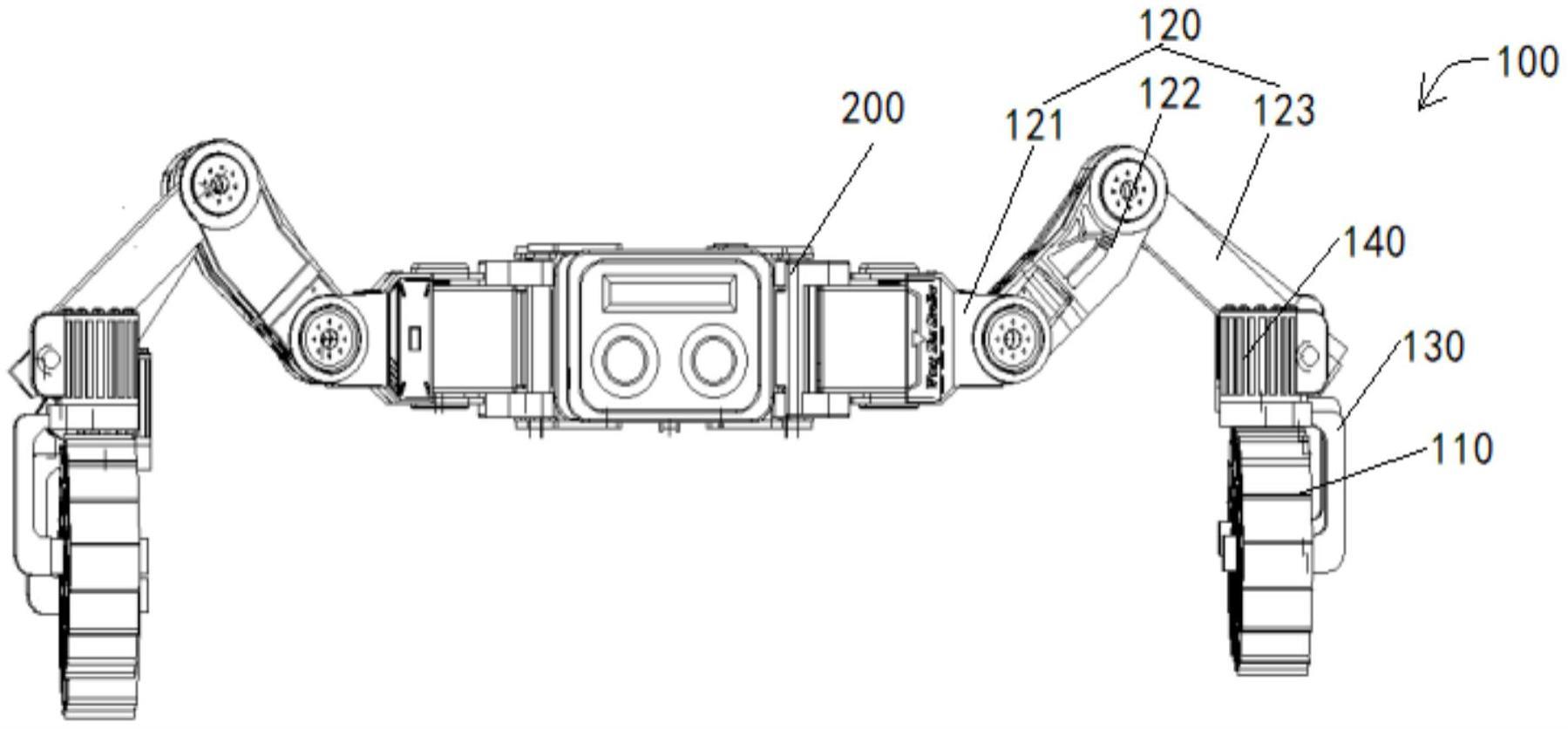
4、本实用新型的第一方面的实施例,提供了一种轮腿混合式主动悬架,用于星球机器人漫步车,所述轮腿混合式主动悬架包括车轮、机械腿、u形万向环和驱动件,所述机械腿的一端与所述星球机器人漫步车的车架本体铰接,所述机械腿的另一端通过所述u形万向环与所述车轮连接,所述u形万向环包括连接部和u形部,所述连接部呈l形,所述连接部的第一端与所述机械腿远离所述车架本体的一端铰接,所述连接部的第二端与u形部的第一端固定连接,所述u形部的第二端与所述车轮连接,所述驱动件的输出轴与所述u形部的第一端固定连接,所述驱动件的壳体与所述连接部的第一端固定连接,其中,所述连接部与所述机械腿的铰接轴,和所述机械腿与所述车架本体的铰接轴垂直设置。
5、可选地,所述机械腿包括依次铰接连接的大腿部、中间腿部和小腿部,所述大腿部远离所述中间腿部的一端与所述车架本体铰接,所述小腿部远离所述中间腿部的一端与所述连接部的第一端铰接,所述大腿部与所述中间腿部的铰接轴、所述中间腿部与所述小腿部的铰接轴,以及所述小腿部与所述连接部的铰接轴平行设置。
6、可选地,所述机械腿还包括:
7、第一舵机,所述第一舵机的壳体与所述车架本体固定连接,所述第一舵机的输出轴与所述大腿部固定连接;
8、第二舵机,所述第二舵机的壳体与所述大腿部固定连接,所述第二舵机的输出轴与所述中间腿部固定连接;
9、第三舵机,所述第三舵机的壳体与所述中间腿部固定连接,所述第三舵机的输出轴与所述小腿部固定连接。
10、可选地,所述机械腿的材质为铝合金。
11、可选地,所述车轮包括:内轮、外轮,以及设置于所述内轮和所述外轮之间的多个缓冲圈,所述内轮和所述外轮同心设置,所述内轮和所述外轮之间形成容纳空间,多个所述缓冲圈均匀设置于所述容纳空间内,所述外轮的厚度、所述内轮的厚度和所述缓冲圈的长度相同。
12、可选地,所述内轮包括一对内环、外圈和多个连接杆,一对所述内环与所述外圈同心设置,一对所述内环相背离的侧面之间的距离,与所述外圈的厚度相同,多个所述连杆用于连接所述内环和所述外圈,多个所述连杆均匀设置。
13、可选地,一对所述内环内固定设有电机壳,所述电机壳内设有无刷电机,无刷电机的输出轴通过联轴器与所述电机壳固定连接,通过所述无刷电机带动所述车轮的旋转,所述电机壳上设有突出部,所述突出部通过轴承与所述u形部的第二端连接。
14、可选地,所述外轮背离所述缓冲圈的一侧均匀设有多个轮刺,所述轮刺的长度与所述外轮的厚度相匹配。
15、可选地,所述外轮和所述缓冲圈的材质为弹性材质。
16、本实用新型第二方面的实施例,提供了一种星球机器人漫步车,所述星球机器人漫步车包括:
17、上述的轮腿混合式主动悬架。
18、本实用新型实施例提供的轮腿混合式主动悬架和星球机器人漫步车,轮腿混合式主动悬架包括车轮、机械腿、u形万向环和驱动件,机械腿的一端与星球机器人漫步车的车架本体铰接,当车轮锁定,能够实现机械腿的前后移动,也即模仿人或动物的足式行走方式,在不平整区域带动星球机器人漫步车的移动;u形万向环包括连接部和u形部,连接部呈l形,连接部的第一端与机械腿远离车架本体的一端铰接,连接部的第二端与u形部的第一端固定连接,u形部的第二端与车轮连接,驱动件的输出轴与u形部的第一端固定连接,驱动件的壳体与连接部的第一端固定连接,通过驱动件的驱动实现车轮径向的360°转动,能够有效避开岩石托底地面,实现星球机器人漫步车的继续行走,提高星球机器人漫步车的效率。
19、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种轮腿混合式主动悬架,用于星球机器人漫步车,其特征在于,所述轮腿混合式主动悬架包括车轮、机械腿、u形万向环和驱动件,所述机械腿的一端与所述星球机器人漫步车的车架本体铰接,所述机械腿的另一端通过所述u形万向环与所述车轮连接,所述u形万向环包括连接部和u形部,所述连接部呈l形,所述连接部的第一端与所述机械腿远离所述车架本体的一端铰接,所述连接部的第二端与u形部的第一端固定连接,所述u形部的第二端与所述车轮连接,所述驱动件的输出轴与所述u形部的第一端固定连接,所述驱动件的壳体与所述连接部的第一端固定连接,其中,所述连接部与所述机械腿的铰接轴,和所述机械腿与所述车架本体的铰接轴垂直设置。
2.根据权利要求1所述的轮腿混合式主动悬架,其特征在于,所述机械腿包括依次铰接连接的大腿部、中间腿部和小腿部,所述大腿部远离所述中间腿部的一端与所述车架本体铰接,所述小腿部远离所述中间腿部的一端与所述连接部的第一端铰接,所述大腿部与所述中间腿部的铰接轴、所述中间腿部与所述小腿部的铰接轴,以及所述小腿部与所述连接部的铰接轴平行设置。
3.根据权利要求2所述的轮腿混合式主动悬架,其特征在于,所述机械腿还包括:
4.根据权利要求1至3任一项所述的轮腿混合式主动悬架,其特征在于,所述机械腿的材质为铝合金。
5.根据权利要求1所述的轮腿混合式主动悬架,其特征在于,所述车轮包括:内轮、外轮,以及设置于所述内轮和所述外轮之间的多个缓冲圈,所述内轮和所述外轮同心设置,所述内轮和所述外轮之间形成容纳空间,多个所述缓冲圈均匀设置于所述容纳空间内,所述外轮的厚度、所述内轮的厚度和所述缓冲圈的长度相同。
6.根据权利要求5所述的轮腿混合式主动悬架,其特征在于,所述内轮包括一对内环、外圈和多个连接杆,一对所述内环与所述外圈同心设置,一对所述内环相背离的侧面之间的距离,与所述外圈的厚度相同,多个所述连接杆用于连接所述内环和所述外圈,多个所述连接杆均匀设置。
7.根据权利要求6所述的轮腿混合式主动悬架,其特征在于,一对所述内环内固定设有电机壳,所述电机壳内设有无刷电机,无刷电机的输出轴通过联轴器与所述电机壳固定连接,通过所述无刷电机带动所述车轮的旋转,所述电机壳上设有突出部,所述突出部通过轴承与所述u形部的第二端连接。
8.根据权利要求5所述的轮腿混合式主动悬架,其特征在于,所述外轮背离所述缓冲圈的一侧均匀设有多个轮刺,所述轮刺的长度与所述外轮的厚度相匹配。
9.根据权利要求5所述的轮腿混合式主动悬架,其特征在于,所述外轮和所述缓冲圈的材质为弹性材质。
10.一种星球机器人漫步车,其特征在于,所述星球机器人漫步车包括:
技术总结
本技术公开了一种轮腿混合式主动悬架和星球机器人漫步车。其中轮腿混合式主动悬架包括车轮、机械腿、U形万向环和驱动件,机械腿的一端与星球机器人漫步车的车架本体铰接,机械腿的另一端通过U形万向环与车轮连接,U形万向环包括连接部和U形部,连接部呈L形,连接部的第一端与机械腿远离车架本体的一端铰接,连接部的第二端与U形部的第一端固定连接,U形部的第二端与车轮连接,驱动件的输出轴与U形部的第一端固定连接,驱动件的壳体与连接部的第一端固定连接,其中,连接部与机械腿的铰接轴,和机械腿与车架本体的铰接轴垂直设置。能够通过驱动件驱动车轮在径向上的转动,实现避障功能,保证星球机器人漫步车在星球上的工作效率。
技术研发人员:陈祉亦,张驰,张鸿富,王一帆,胡岳函,孔祥伟
受保护的技术使用者:东北大学
技术研发日:20230619
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!