一种遥感勘测无人机的制作方法
本技术涉及无人机,特别是涉及一种遥感勘测无人机。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。
2、现有的无人机会搭配摄像头进行遥感勘测,但是摄像头处于固定状态,勘测角度无法调节,需要加以改进。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供一种遥感勘测无人机。
2、本实用新型通过以下技术方案来实现上述目的:
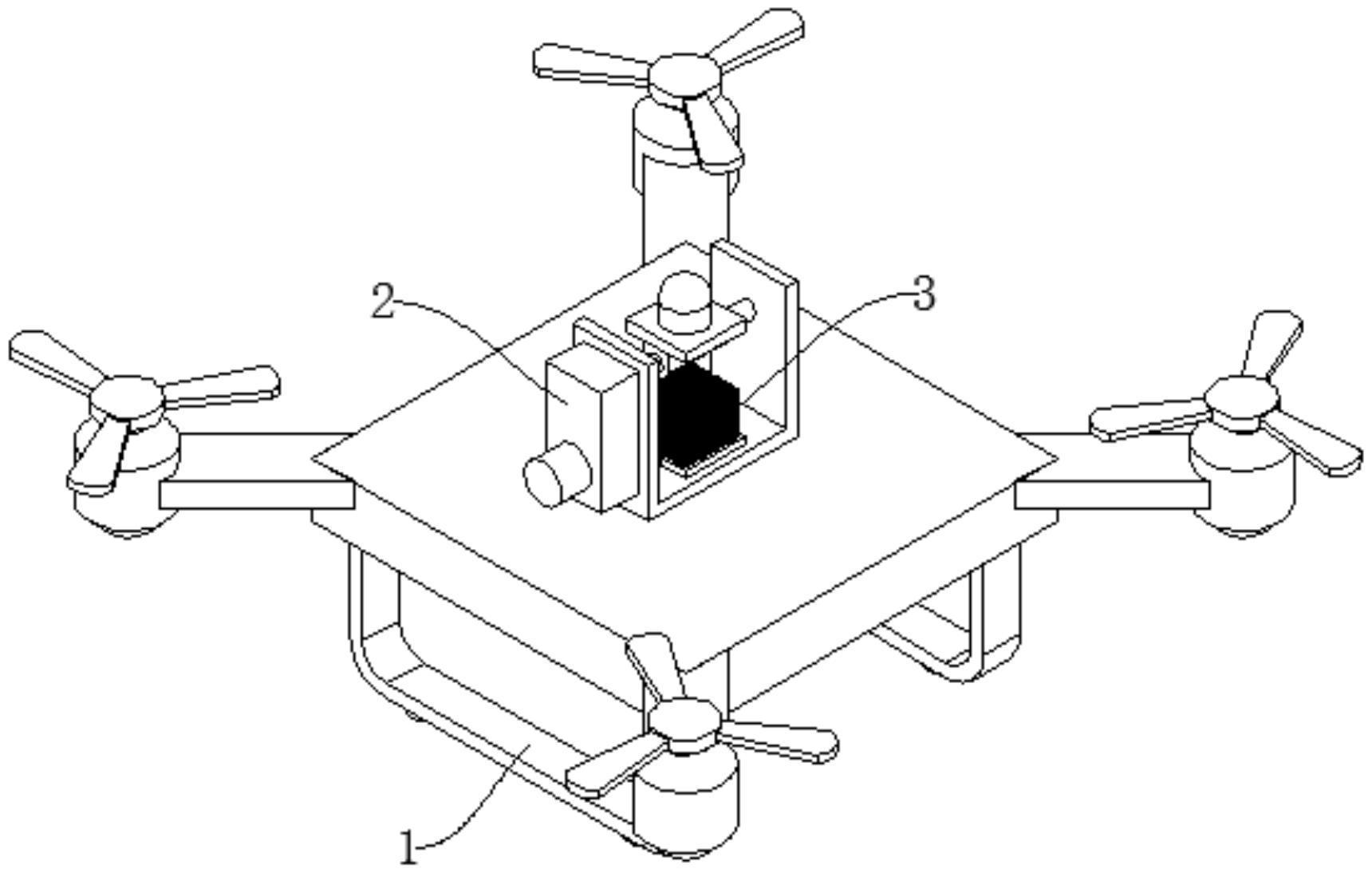
3、一种遥感勘测无人机,包括机体,还包括用于对周围环境进行勘测的勘测机构,所述勘测机构固定在所述机体上方;
4、所述勘测机构包括固定架、转动组件,所述转动组件安装在所述固定架上,所述转动组件包括传动箱、电机、第一转轴、第一皮带轮、传动带、第二皮带轮、第二转轴、固定套、固定板、摄像头,所述电机固定在所述传动箱侧面,所述第一转轴固定在所述电机输出端,所述第一皮带轮安装在所述第一转轴外侧,所述传动带安装在所述第一皮带轮上,所述第二皮带轮设置在所述第一皮带轮上方,所述第二转轴固定在所述第二皮带轮内侧,所述固定套安装在所述第二转轴上,所述固定板安装在所述固定套上方,所述摄像头安装在所述固定板上方。
5、优选的,清理机构安装在所述勘测机构上,所述清理机构包括清理组件、圆弧块、固定螺栓,所述圆弧块安装在所述清理组件两侧,所述固定螺栓安装在所述圆弧块上。
6、优选的,所述清理组件包括安装板、刷毛,所述刷毛固定在所述安装板上方。
7、优选的,所述电机与所述传动箱通过螺栓连接,所述传动带的材质为橡胶。
8、优选的,所述固定板的材质为不锈钢,所述摄像头与所述固定板通过螺栓连接。
9、优选的,所述刷毛与所述安装板粘接,所述刷毛的材质为尼龙。
10、与现有技术相比,本实用新型的有益效果如下:
11、通过设置勘测机构,需要调节摄像头的勘测角度时,启动电机,电机通过第一转轴带动第一皮带轮转动,第一皮带轮通过传动带带动第二皮带轮转动,第二皮带轮通过第二转轴带动固定套转动,固定套通过固定板带动摄像头转动,如此对摄像头的勘测角度进行调节,有效扩大了无人机勘测范围。
技术特征:
1.一种遥感勘测无人机,包括机体(1),其特征在于:还包括用于对周围环境进行勘测的勘测机构(2),所述勘测机构(2)固定在所述机体(1)上方;
2.根据权利要求1所述的一种遥感勘测无人机,其特征在于:清理机构(3)安装在所述勘测机构(2)上,所述清理机构(3)包括清理组件、圆弧块(303)、固定螺栓(304),所述圆弧块(303)安装在所述清理组件两侧,所述固定螺栓(304)安装在所述圆弧块(303)上。
3.根据权利要求2所述的一种遥感勘测无人机,其特征在于:所述清理组件包括安装板(301)、刷毛(302),所述刷毛(302)固定在所述安装板(301)上方。
4.根据权利要求1所述的一种遥感勘测无人机,其特征在于:所述电机(203)与所述传动箱(202)通过螺栓连接,所述传动带(206)的材质为橡胶。
5.根据权利要求1所述的一种遥感勘测无人机,其特征在于:所述固定板(210)的材质为不锈钢,所述摄像头(211)与所述固定板(210)通过螺栓连接。
6.根据权利要求3所述的一种遥感勘测无人机,其特征在于:所述刷毛(302)与所述安装板(301)粘接,所述刷毛(302)的材质为尼龙。
技术总结
本技术公开了一种遥感勘测无人机,包括机体,还包括用于对周围环境进行勘测的勘测机构,所述勘测机构固定在所述机体上方,所述勘测机构包括固定架、转动组件,所述转动组件安装在所述固定架上。本技术通过设置勘测机构,需要调节摄像头的勘测角度时,启动电机,电机通过第一转轴带动第一皮带轮转动,第一皮带轮通过传动带带动第二皮带轮转动,第二皮带轮通过第二转轴带动固定套转动,固定套通过固定板带动摄像头转动,如此对摄像头的勘测角度进行调节,有效扩大了无人机勘测范围。
技术研发人员:李林辉,黄筱,杜泽东,张林杰
受保护的技术使用者:中国电建集团贵阳勘测设计研究院有限公司
技术研发日:20230630
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!