无人飞行器及其机架的制作方法
本申请涉及飞行器,特别是涉及一种无人飞行器及其机架。
背景技术:
1、无人飞行器被广泛用于航拍、测绘、快递等众多领域。无人飞行器的轴距越大,其抗风力也越强,稳定性也越好,更有利于无人飞行器的使用。但是,在无人飞行器的轴距越大时,随之而来的是无人飞行器的在空间上所占用的尺寸也会越大,不便于使用者携带。
技术实现思路
1、基于此,有必要提供一种无人飞行器及其机架,以能够同时满足使用需求和携带需求。
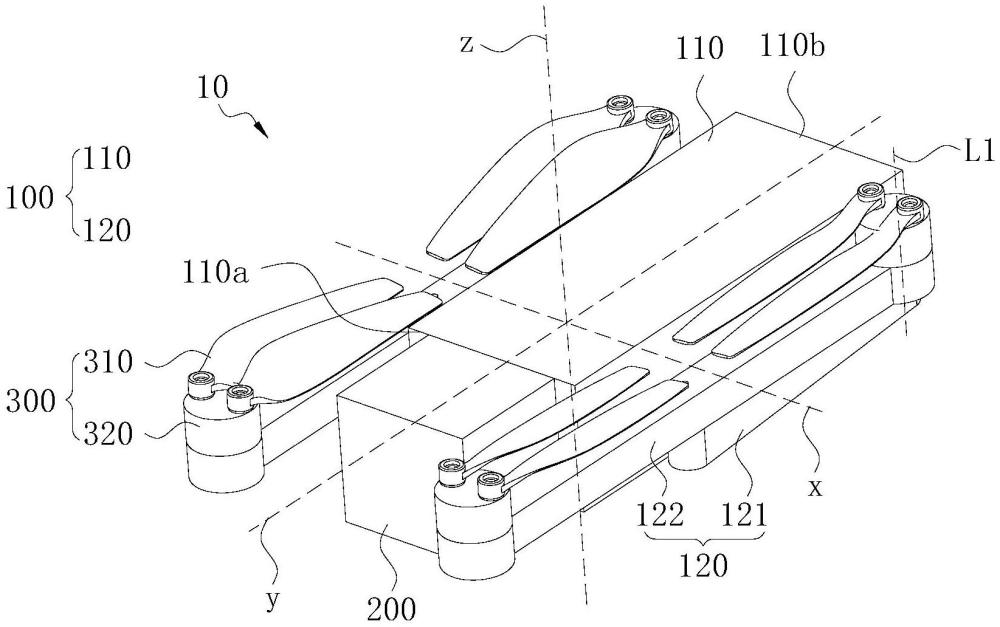
2、根据本申请的一个方面,本申请实施例提供了一种无人飞行器的机架,包括:
3、机身;以及
4、用于承载动力装置的机臂组件,动力装置用于提供飞行动力;机臂组件包括第一机臂和第二机臂,第一机臂与机身可转动连接,第二机臂与第一机臂可转动连接;
5、其中,机臂组件具有折叠状态和展开状态;
6、机臂组件处于折叠状态,第一机臂和第二机臂收拢于机身的侧面,第一机臂在参考面上的正投影为第一投影,第二机臂在参考面上的正投影为第二投影,第一投影和第二投影至少部分重叠,参考面垂直于无人飞行器的航向轴。
7、在其中一个实施例中,机臂组件处于折叠状态,第一投影基本位于第二投影内。
8、在其中一个实施例中,机臂组件处于折叠状态,第一投影与第二投影基本重叠。
9、在其中一个实施例中,机臂组件处于折叠状态,第一投影的延伸方向与第二投影的延伸方向基本平行。
10、在其中一个实施例中,机臂组件处于折叠状态,第一投影的延伸方向与第二投影的延伸方向所呈角度小于5度。
11、在其中一个实施例中,机臂组件处于折叠状态,第一投影的延伸方向与无人飞行器的横滚轴基本平行;和/或
12、机臂组件处于折叠状态,第二投影的延伸方向与无人飞行器的横滚轴基本平行。
13、在其中一个实施例中,第一机臂绕第一轴线可转动连接于机身,第二机臂绕第二轴线可转动连接于第一机臂;
14、第一轴线与第二轴线基本平行。
15、在其中一个实施例中,第一机臂绕第一轴线可转动连接于机身,第二机臂绕第二轴线可转动连接于第一机臂;
16、第一轴线与第二轴线所呈角度小于5度。
17、在其中一个实施例中,第一轴线和航向轴基本平行;和/或
18、第二轴线和航向轴基本平行。
19、在其中一个实施例中,第一轴线和航向轴呈第一预设角度,第一预设角度大于等于0度且小于等于30度;和/或
20、第二轴线和航向轴呈第二预设角度,第二预设角度大于等于0度且小于等于30度。
21、在其中一个实施例中,第二机臂具有沿第二机臂的纵长方向相对设置的第一端部和第二端部,第一端部和第二端部上分别设置动力装置;
22、沿第二机臂的纵长方向,第二机臂上位于第一端部和第二端部之间的部分与第一机臂可转动连接。
23、在其中一个实施例中,沿第二机臂的纵长方向,第二机臂具有依次连接的第一段、第二段和第三段,第一段远离第二段的一端为第一端部,第三段远离第二段的一端为第二端部;
24、第一段、第二段和第三段的纵向长度均相同;第二段与第一机臂可转动连接。
25、在其中一个实施例中,第二机臂朝向机身底部的一侧,与第一机臂朝向机身顶部的一侧连接;或者
26、第二机臂朝向机身顶部的一侧,与第一机臂朝向机身底部的一侧连接。
27、在其中一个实施例中,机臂组件处于展开状态,第一机臂和第二机臂展开于机身的侧面,在机臂组件从折叠状态转换为展开状态的过程中,第一机臂相对无人飞行器的横滚轴转动第三预设角度,第二机臂相对第一机臂转动第四预设角度;
28、其中,第三预设角度大于等于60度且小于等于120度;和/或
29、第四预设角度大于等于45度且小于等于135度。
30、在其中一个实施例中,第一机臂可转动连接于机身的前端或者机身的后端;或者
31、第一机臂可转动连接于机身上更靠近机身的前端或者机身的后端的部分。
32、在其中一个实施例中,机身在参考面上的正投影为第三投影,第三投影沿无人飞行器的横滚轴的轴向尺寸为预设尺寸;
33、其中,第一投影的纵向长度与预设尺寸的比值为0.33至0.66;和/或
34、第二投影的纵向长度与预设尺寸相同。
35、在其中一个实施例中,机臂组件设置有两个,两个机臂组件分别设于机身沿无人飞行器的横滚轴的相对两侧。
36、在其中一个实施例中,机身的前端用于安装摄像模组;
37、机臂组件处于折叠状态,沿无人飞行器的横滚轴的轴向,第二机臂的前端位于摄像模组的前端的前方。
38、根据本申请的另一方面,本申请实施例提供了一种无人飞行器,包括以上任一实施例中的无人飞行器的机架。
39、在其中一个实施例中,无人飞行器还包括设于第二机臂的动力装置,动力装置包括桨叶和设于第二机臂的驱动件,桨叶具有收纳状态;驱动件传动连接桨叶,用于驱动桨叶转动;
40、其中,桨叶位于第二机臂的顶侧,桨叶能够在收纳状态下与机身的顶部相贴合;或者
41、桨叶位于第二机臂的底侧,桨叶能够在收纳状态下与机身的底部相贴合。
42、上述无人飞行器及其机架中,机架至少包括机身和机臂组件,机臂组件包括第一机臂和第二机臂,第一机臂可转动连接于机身,第二机臂可转动连接于第一机臂,使用者可以拉开第二机臂使第一机臂和第二机臂远离机身而使飞行器处于展开状态,随之,使用者可以将第一机臂和第二机臂压向机身而使飞行器处于折叠状态。机臂组件处于折叠状态,第一机臂和第二机臂收拢于机身的侧面,在无人飞行器的航向轴的方向上看,第一机臂和第二机臂至少部分重叠,使得在折叠状态下的机臂组件所占用的尺寸可以更小。由此,通过上述展开形式和折叠形式的配合,能够使得在机臂组件处于展开状态下无人飞行器具有所需要的轴距的同时,减小在机臂组件处于折叠状态下无人飞行器所占用的尺寸,满足了使用需求和携带需求。
43、本申请实施例的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请实施例的实践了解到。
技术特征:
1.一种无人飞行器的机架,其特征在于,包括:
2.根据权利要求1所述的无人飞行器的机架,其特征在于,所述机臂组件处于所述折叠状态,所述第一投影基本位于所述第二投影内;或者
3.根据权利要求1所述的无人飞行器的机架,其特征在于,所述机臂组件处于所述折叠状态,所述第一投影的延伸方向与所述第二投影的延伸方向基本平行。
4.根据权利要求1所述的无人飞行器的机架,其特征在于,所述机臂组件处于所述折叠状态,所述第一投影的延伸方向与所述第二投影的延伸方向所呈角度小于5度。
5.根据权利要求1所述的无人飞行器的机架,其特征在于,所述机臂组件处于所述折叠状态,所述第一投影的延伸方向与所述无人飞行器的横滚轴基本平行;和/或
6.根据权利要求1-5任一项所述的无人飞行器的机架,其特征在于,所述第一机臂绕第一轴线可转动连接于所述机身,所述第二机臂绕第二轴线可转动连接于所述第一机臂;
7.根据权利要求1-5任一项所述的无人飞行器的机架,其特征在于,所述第一机臂绕第一轴线可转动连接于所述机身,所述第二机臂绕第二轴线可转动连接于所述第一机臂;
8.根据权利要求7所述的无人飞行器的机架,其特征在于,所述第一轴线和所述航向轴基本平行;和/或
9.根据权利要求7所述的无人飞行器的机架,其特征在于,所述第一轴线和所述航向轴呈第一预设角度,所述第一预设角度大于等于0度且小于等于30度;和/或
10.根据权利要求1-5任一项所述的无人飞行器的机架,其特征在于,所述第二机臂具有沿所述第二机臂的纵长方向相对设置的第一端部和第二端部,所述第一端部和所述第二端部上分别设置所述动力装置;
11.根据权利要求10所述的无人飞行器的机架,其特征在于,沿所述第二机臂的纵长方向,所述第二机臂具有依次连接的第一段、第二段和第三段,所述第一段远离所述第二段的一端为所述第一端部,所述第三段远离所述第二段的一端为所述第二端部;
12.根据权利要求1-5任一项所述的无人飞行器的机架,其特征在于,所述第二机臂朝向所述机身底部的一侧,与所述第一机臂朝向所述机身顶部的一侧连接;或者
13.根据权利要求1-5任一所述的无人飞行器的机架,其特征在于,所述机臂组件处于所述展开状态,所述第一机臂和所述第二机臂展开于所述机身的侧面,在所述机臂组件从折叠状态转换为展开状态的过程中,所述第一机臂相对所述无人飞行器的横滚轴转动第三预设角度,所述第二机臂相对所述第一机臂转动第四预设角度;
14.根据权利要求1-5任一项所述的无人飞行器的机架,其特征在于,所述第一机臂可转动连接于所述机身的前端或者所述机身的后端;或者
15.根据权利要求1-5任一项所述的无人飞行器的机架,其特征在于,所述机身在所述参考面上的正投影为第三投影,所述第三投影沿所述无人飞行器的横滚轴的轴向尺寸为预设尺寸;
16.根据权利要求1-5任一项所述的无人飞行器的机架,其特征在于,所述机臂组件设置有两个,两个所述机臂组件分别设于所述机身沿所述无人飞行器的横滚轴的相对两侧。
17.根据权利要求1-5任一项所述的无人飞行器的机架,其特征在于,所述机身的前端用于安装摄像模组;
18.一种无人飞行器,其特征在于,包括如权利要求1-17任一项所述的无人飞行器的机架。
19.根据权利要求18所述的无人飞行器,其特征在于,所述无人飞行器还包括设于所述第二机臂的动力装置,所述动力装置包括桨叶和设于所述第二机臂的驱动件,所述桨叶具有收纳状态;所述驱动件传动连接所述桨叶,用于驱动所述桨叶转动;
技术总结
本申请涉及飞行器技术领域,特别是涉及一种无人飞行器及其机架。机臂组件包括第一机臂和第二机臂,第一机臂可转动连接于机身,第二机臂可转动连接于第一机臂。机臂组件处于折叠状态,第一机臂和第二机臂收拢于机身的侧面,在无人飞行器的航向轴的方向上看,第一机臂和第二机臂至少部分重叠,使得在折叠状态下的机臂组件所占用的尺寸可以更小。
技术研发人员:请求不公布姓名
受保护的技术使用者:刘俊
技术研发日:20230710
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!