一种复合翼无人机尾舵连动装置的制作方法
本技术属于无人机,具体涉及一种复合翼无人机尾舵连动装置。
背景技术:
1、无人机主要包括固定翼无人机和螺旋翼无人机,其中固定翼无人机的机翼往往包括主翼、副翼、水平尾翼、尾舵等结构,其中,副翼是指安装在主翼的翼梢后缘的一小块可动的翼面,而尾舵则是安装在尾翼的翼梢后缘的一小块可动的翼面。
2、尾翼包括垂直水平尾翼和水平尾翼,现有技术中,两个水平尾翼上的两个尾舵往往是独立转动的,不仅需要两套驱动机构,造成空间占用,同时也容易造成两个尾舵转动角度不一致,而造成无人机的升降过程中的偏斜,为此,有必要设计一种由同一套驱动机构进行驱动并能够实现尾舵同步连动的装置。
技术实现思路
1、为了解决现有技术存在的上述问题,本方案提供了一种复合翼无人机尾舵连动装置。
2、本实用新型所采用的技术方案为:
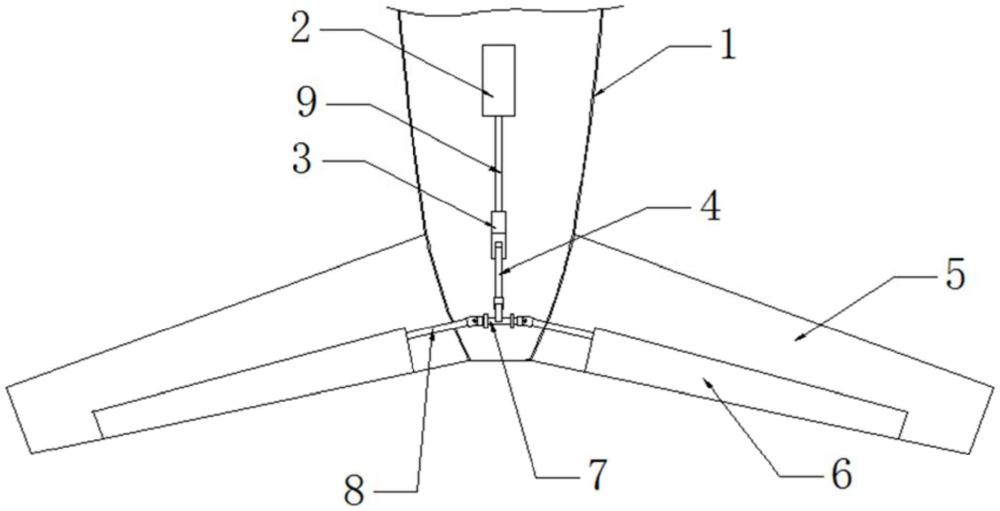
3、一种复合翼无人机尾舵连动装置,包括驱动机构、推杆、尾舵、连动杆、舵轴杆、臂杆和万向连接器;
4、在无人机两个水平尾翼上均设置有可转动的尾舵;舵轴杆与尾舵固定连接,且其一端伸入无人机的主机体内;所述连动杆设置于主机体的尾部,且其两端通过分别的万向连接器与舵轴杆相连;所述臂杆与连动杆的中部垂直连接;所述推杆的后端与臂杆转动连接;所述驱动机构用于控制推杆的前端沿主机体的前后方向移动,以通过臂杆控制连动杆转动,进而通过舵轴杆控制尾舵转动。
5、作为上述尾舵连动装置的备选结构或补充设计:在主机体内的尾部处固定设置有座板,所述连动杆可转动的连接于座板上。
6、作为上述尾舵连动装置的备选结构或补充设计:所述臂杆与推杆之间的夹角为80°-120°。
7、作为上述尾舵连动装置的备选结构或补充设计:所述驱动机构包括滑块,所述滑块与主机体机舱的内底部滑动连接,并能够沿主机体的前后方向滑动;所述推杆的前端与滑块转动连接。
8、作为上述尾舵连动装置的备选结构或补充设计:所述驱动机构还包括驱动器和传动杆;所述驱动器的驱动轴通过传动杆与滑块连接。
9、作为上述尾舵连动装置的备选结构或补充设计:所述驱动器为转动电机,所述传动杆为丝杆,所述滑块上设置有与丝杆啮合的内螺纹孔;所述转动电机与丝杆同轴固定连接。
10、作为上述尾舵连动装置的备选结构或补充设计:所述驱动器为伸缩电机,所述传动杆为直杆;所述伸缩电机与直杆同轴固定连接。
11、作为上述尾舵连动装置的备选结构或补充设计:两个水平尾翼呈八字形分布。
12、本实用新型的有益效果为:
13、1.本方案中,通过连动杆连接舵轴杆的方式,使得两个水平尾翼上安装的尾舵能够同步旋转和连动,从而保证尾舵转动候的角度一致,以降低无人机飞行时发生偏斜的概率;
14、2.本方案中两个水平尾翼上的尾舵由同一驱动机构进行驱动,而不需要两套驱动机构,节省了安装空间和无人机的整机重量。
技术特征:
1.一种复合翼无人机尾舵连动装置,其特征在于:包括驱动机构、推杆(4)、尾舵(6)、连动杆(7)、舵轴杆(8)、臂杆(10)和万向连接器(12);
2.根据权利要求1所述的复合翼无人机尾舵连动装置,其特征在于:在主机体(1)内的尾部处固定设置有座板(11),所述连动杆(7)可转动的连接于座板(11)上。
3.根据权利要求1所述的复合翼无人机尾舵连动装置,其特征在于:所述臂杆(10)与推杆(4)之间的夹角为80°-120°。
4.根据权利要求1所述的复合翼无人机尾舵连动装置,其特征在于:所述驱动机构包括滑块(3),所述滑块(3)与主机体(1)机舱的内底部滑动连接,并能够沿主机体(1)的前后方向滑动;所述推杆(4)的前端与滑块(3)转动连接。
5.根据权利要求4所述的复合翼无人机尾舵连动装置,其特征在于:所述驱动机构还包括驱动器(2)和传动杆(9);所述驱动器(2)的驱动轴通过传动杆(9)与滑块(3)连接。
6.根据权利要求5所述的复合翼无人机尾舵连动装置,其特征在于:所述驱动器(2)为转动电机,所述传动杆(9)为丝杆,所述滑块(3)上设置有与丝杆啮合的内螺纹孔;所述转动电机与丝杆同轴固定连接。
7.根据权利要求5所述的复合翼无人机尾舵连动装置,其特征在于:所述驱动器(2)为伸缩电机,所述传动杆(9)为直杆;所述伸缩电机与直杆同轴固定连接。
8.根据权利要求1所述的复合翼无人机尾舵连动装置,其特征在于:两个水平尾翼(5)呈八字形分布。
技术总结
本技术属于无人机技术领域,具体涉及一种复合翼无人机尾舵连动装置,包括驱动机构、推杆、尾舵、连动杆、舵轴杆、臂杆和万向连接器;在无人机两个水平尾翼上均设置有可转动的尾舵;舵轴杆与尾舵固定连接;连动杆设置于主机体的尾部,两端通过分别的万向连接器与舵轴杆相连;所述臂杆与连动杆的中部垂直连接;所述推杆的后端与臂杆转动连接;所述驱动机构用于控制推杆的前端沿主机体的前后方向移动,以通过臂杆控制连动杆转动,进而通过舵轴杆控制尾舵转动。本方案通过连动杆连接舵轴杆的方式,使得两个水平尾翼上安装的尾舵能够同步旋转和连动,从而保证尾舵转动候的角度一致,以降低无人机飞行时发生偏斜的概率。
技术研发人员:李敏,章双全,郑铁宁,马衍青
受保护的技术使用者:辰极智航(北京)科技有限公司
技术研发日:20230912
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!