一种多旋翼无人机的制作方法
本发明属于无人机,具体为一种多旋翼无人机。
背景技术:
1、无人机技术的迅速发展,使得多个无人机之间的互相连接成为一个新的研究领域;这种互相连接的意义在于,它能够实现更高效的任务执行、更强大的数据处理能力以及更智能的协同工作。
2、首先,多个无人机之间的互相连接可以提高任务执行的效率;在搜索和救援任务中,一个无人机可以负责搜索,而另一个无人机可以负责传输物资;通过互相连接,无人机可以快速地交换信息和位置信息,从而更快地找到目标。
3、其次,多个无人机之间的互相连接可以提供更强大的数据处理能力;无人机通常配备有多种传感器,可以收集大量的数据,通过互相连接,稳定的连接后使多个无人机共享数据更加便捷,从而获得更全面的信息,此外,多个无人机之间还可以进行协同分析,从而更快地识别出目标。
4、最后,多个无人机之间的互相连接可以实现更智能的协同工作,通过互相连接,无人机可以共享其状态和位置信息,从而更好地协调其行动;例如,在农业领域,多个无人机可以协同工作,从而更快地覆盖更大的区域。
5、总之,多个无人机之间的互相连接具有重要意义;可以提高任务执行的效率、提供更强大的数据处理能力以及实现更智能的协同工作。
6、现有技术一种组合式多旋翼无人机及其控制方法(公开号cn112977793b)的专利文件中记载了一种组合式多旋翼无人机,具有提高载重能力的效果。
7、现有技术一种模块化可变形无人机的结构(公开号cn113104213b)的专利文件中记载了一种模块化可变形无人机的结构,无人机部分损坏后可快速更换模块继续工作,结构可变形,适合多样化的任务需求,具有便于携带、快速部署、组合多样的效果。
8、但是上述发明中记载的多个无人机之间的组合方式,很难达到在飞行姿态中进行控制并形成互相组合的效果,同时,由于无人机中存在机翼距离机身越远,则无人机整体越稳定的效果,因此多无人机在进行空中组合时,相互之间最先接触的部位是需要避免产生接触的机翼部位;而将机翼设置于无人机杆体中间区域的应用方式,虽然避免了机翼的相互碰撞,又会影响正常使用时的机身利用率,且机翼外部伸出的杆体会增加安全距离,容易造成无人机飞行不稳定的问题。
技术实现思路
1、本发明的目的在于:一方面,为了解决多个无人机进行空中组合时,机翼之间互相干涉的同时,另一方面避免机翼干涉时对机身利用率较低的技术问题,提供一种多旋翼无人机。
2、本发明采用的技术方案如下:
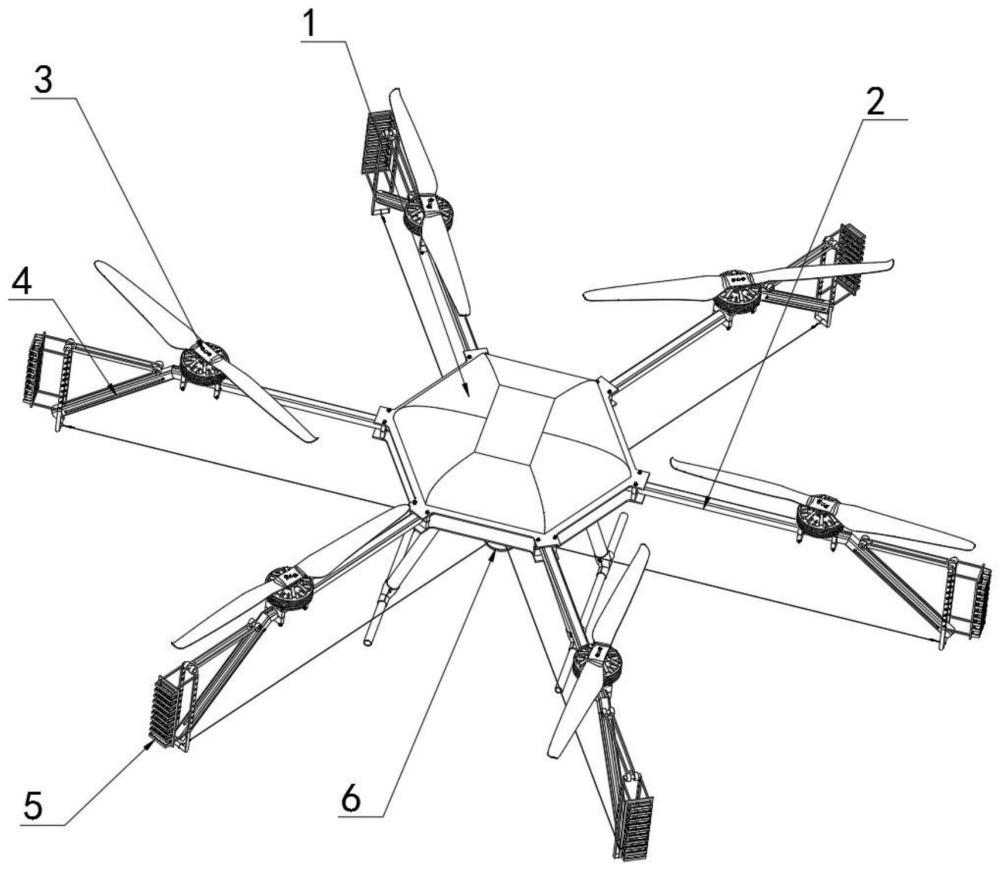
3、一种多旋翼无人机,包括由机架组件、机架组件外侧呈圆环形分布的多个旋翼组件以及机架组件与旋翼组件之间连接的固定杆组件,所述旋翼组件可滑动的安装于固定杆组件上,所述固定杆组件远离机架组件的一端可旋转的连接有活动杆组件,所述活动杆组件另一端设置有连接组件;
4、所述机架组件包括有架体及架体底部安装的支撑腿;
5、所述固定杆组件包括有与机架组件相连接的固定杆体;
6、所述活动杆组件包括有与固定杆体相连通的活动杆体,所述固定杆体与活动杆体内腔互相连通形成管道内腔,所述管道内腔设置有可滑动的第一滑动筒体与第二滑动筒体,所述第一滑动筒体与第二滑动筒体之间连接有万向轴组件,所述第一滑动筒体远离第二滑动筒体的一端端面轮廓处向外延伸有套筒,所述固定杆体内固定有电动伸缩杆,且电动伸缩杆输出端穿过套筒内腔与第一滑动筒体固定。
7、其中,所述万向轴组件包括有与第一滑动筒体相连接的球形轴体及与第二滑动筒体相连接的球形轴套,所述球形轴体与球形轴套球形转动连接。
8、其中,所述旋翼组件包括有旋翼电机、旋翼电机输出端固定的转动扇叶以及旋翼电机外侧安装的固定夹具,所述固定夹具与固定杆体及活动杆体均配合滑动连接,所述第一滑动筒体上设置有与旋翼电机固定的贯穿连杆。
9、其中,所述固定杆体上开设有配合贯穿连杆滑动的第一贯穿导槽,所述活动杆体上开设有配合贯穿连杆滑动的第二贯穿导槽,所述第二滑动筒体上固定有与第二贯穿导槽配合滑动的上滑块,所述第一滑动筒体弧形侧面上远离贯穿连杆的对称端固定有下滑块,所述固定杆体上开设有配合下滑块滑动的内侧槽。
10、其中,所述固定夹具向管道内壁一侧延伸有突出部,所述固定杆体外壁沿直径方向上开设有配合突出部滑动的第一外侧槽,所述活动杆体外壁沿直径方向上开设有配合突出部滑动的第二外侧槽。
11、其中,所述连接组件包括有由四个直杆段呈矩形框形连接的连接架、与连接架一侧直杆段转动连接的绞接连杆、与连接架固定连接的连接板及连接板远离连接架一侧固定的多个插接框架,所述连接架上与绞接连杆转动连接处相平行的另一直杆段设置为延伸杆。
12、其中,所述架体底部中心处设置有收放组件,所述收放组件包括有与架体固定的步进电机、步进电机输出端固定的绕线辊以及绕线辊上绕接的多个牵引线,多个所述牵引线远离绕线辊的自由端分别与多个连接组件中的延伸杆绕接固定。
13、其中,所述连接架内两个与延伸杆相连接的直杆段之间还连接有贯穿转轴,所述贯穿转轴与活动杆体远离固定杆体的一端转动连接,所述第二滑动筒体设置有延伸至活动杆体外侧的贯穿轴杆,所述绞接连杆远离连接架的一端与贯穿轴杆转动连接。
14、其中,多个所述插接框架呈直线等距排列,多个所述插接框架之间设置有容纳插接框架插接的插接间隙,所述插接框架靠近插接间隙的边缘处均设置有吸附磁链,所述插接框架内腔开设有容置吸附磁链的容置空腔。
15、其中,所述吸附磁链包括有绕容置空腔开口处环形分布的贯穿线、贯穿线穿设的多个小磁珠与大磁珠,多个所述小磁珠与大磁珠在贯穿线上两两间隔分布,所述大磁珠设置于容置空腔内部,所述小磁珠设置于容置空腔开口处,所述容置空腔开口处还设置有挡槽口,所述挡槽口的开口间距大于小磁珠的半径同时小于大磁珠的半径。
16、综上所述,由于采用了上述技术方案,本发明的有益效果是:
17、1、本发明中,采用了可滑动位移的的旋翼组件,由于采用了旋翼组件与机架组件之间多段式的连接结构,其中连接结构包括固定杆体与活动杆体,使多旋翼无人机装置在未形成拼接时,旋翼组件与机架组件之间的连接结构充分伸展达到最大利用状态;当多旋翼无人机装置准备进行拼接时,旋翼组件可滑移至固定杆体区域并同步展开连接组件,避免旋翼组件在拼接时造成碰撞。
18、2、本发明中,采用了可转动伸缩长度的活动杆组件,当套筒位于活动杆体与固定杆体之间连接处时,可保持对活动杆体与固定杆体之间轴向的固定作用;当万向轴组件的转动部位位于活动杆体与固定杆体之间连接处时,可实现活动杆体绕活动杆体与固定杆体之间连接处的平面垂直方向上转动,从而实现控制活动杆体旋转并展开连接组件的效果。
技术特征:
1.一种多旋翼无人机,包括由机架组件(1)、机架组件(1)外侧呈圆环形分布的多个旋翼组件(3)以及机架组件(1)与旋翼组件(3)之间连接的固定杆组件(2),其特征在于:所述旋翼组件(3)可滑动的安装于固定杆组件(2)上,所述固定杆组件(2)远离机架组件(1)的一端可旋转的连接有活动杆组件(4),所述活动杆组件(4)另一端设置有连接组件(5);
2.如权利要求1所述的一种多旋翼无人机,其特征在于:所述万向轴组件包括有与第一滑动筒体(33)相连接的球形轴体(37)及与第二滑动筒体(38)相连接的球形轴套(36),所述球形轴体(37)与球形轴套(36)球形转动连接。
3.如权利要求2所述的一种多旋翼无人机,其特征在于:所述旋翼组件(3)包括有旋翼电机(31)、旋翼电机(31)输出端固定的转动扇叶(32)以及旋翼电机(31)外侧安装的固定夹具(39),所述固定夹具(39)与固定杆体(21)及活动杆体(41)均配合滑动连接,所述第一滑动筒体(33)上设置有与旋翼电机(31)固定的贯穿连杆(332)。
4.如权利要求3所述的一种多旋翼无人机,其特征在于:所述固定杆体(21)上开设有配合贯穿连杆(332)滑动的第一贯穿导槽(23),所述活动杆体(41)上开设有配合贯穿连杆(332)滑动的第二贯穿导槽(42),所述第二滑动筒体(38)上固定有与第二贯穿导槽(42)配合滑动的上滑块(381),所述第一滑动筒体(33)弧形侧面上远离贯穿连杆(332)的对称端固定有下滑块(331),所述固定杆体(21)上开设有配合下滑块(331)滑动的内侧槽(24)。
5.如权利要求3所述的一种多旋翼无人机,其特征在于:所述固定夹具(39)向管道内壁一侧延伸有突出部,所述固定杆体(21)外壁沿直径方向上开设有配合突出部滑动的第一外侧槽(22),所述活动杆体(41)外壁沿直径方向上开设有配合突出部滑动的第二外侧槽(43)。
6.如权利要求1所述的一种多旋翼无人机,其特征在于:所述连接组件(5)包括有由四个直杆段呈矩形框形连接的连接架(46)、与连接架(46)一侧直杆段转动连接的绞接连杆(44)、与连接架(46)固定连接的连接板(51)及连接板(51)远离连接架(46)一侧固定的多个插接框架(52),所述连接架(46)上与绞接连杆(44)转动连接处相平行的另一直杆段设置为延伸杆(451)。
7.如权利要求6所述的一种多旋翼无人机,其特征在于:所述架体(11)底部中心处设置有收放组件(6),所述收放组件(6)包括有与架体(11)固定的步进电机(61)、步进电机(61)输出端固定的绕线辊(62)以及绕线辊(62)上绕接的多个牵引线(63),多个所述牵引线(63)远离绕线辊(62)的自由端分别与多个连接组件(5)中的延伸杆(451)绕接固定。
8.如权利要求7所述的一种多旋翼无人机,其特征在于:所述连接架(46)内两个与延伸杆(451)相连接的直杆段之间还连接有贯穿转轴(45),所述贯穿转轴(45)与活动杆体(41)远离固定杆体(21)的一端转动连接,所述第二滑动筒体(38)设置有延伸至活动杆体(41)外侧的贯穿轴杆(382),所述绞接连杆(44)远离连接架(46)的一端与贯穿轴杆(382)转动连接。
9.如权利要求6所述的一种多旋翼无人机,其特征在于:多个所述插接框架(52)呈直线等距排列,多个所述插接框架(52)之间设置有容纳插接框架(52)插接的插接间隙(58),所述插接框架(52)靠近插接间隙(58)的边缘处均设置有吸附磁链,所述插接框架(52)内腔开设有容置吸附磁链的容置空腔(53)。
10.如权利要求9所述的一种多旋翼无人机,其特征在于:所述吸附磁链包括有绕容置空腔(53)开口处环形分布的贯穿线(57)、贯穿线(57)穿设的多个小磁珠(55)与大磁珠(56),多个所述小磁珠(55)与大磁珠(56)在贯穿线(57)上两两间隔分布,所述大磁珠(56)设置于容置空腔(53)内部,所述小磁珠(55)设置于容置空腔(53)开口处,所述容置空腔(53)开口处还设置有挡槽口(54),所述挡槽口(54)的开口间距大于小磁珠(55)的半径同时小于大磁珠(56)的半径。
技术总结
本发明公开了一种多旋翼无人机,包括由机架组件、机架组件外侧呈圆环形分布的多个旋翼组件以及机架组件与旋翼组件之间连接的固定杆组件,所述旋翼组件可滑动的安装于固定杆组件上,所述固定杆组件远离机架组件的一端可旋转的连接有活动杆组件,所述活动杆组件另一端设置有连接组件。本发明中,采用了可滑动位移的的旋翼组件,当多旋翼无人机装置准备进行拼接时,旋翼组件可滑移至固定杆体区域并同步展开连接组件,避免旋翼组件在拼接时造成碰撞。
技术研发人员:王吉林,张立超,王军,管竟尧,张枨枨,游忠川
受保护的技术使用者:山东字节信息科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!