一种磁浮卫星平台的融合姿态测控方法及系统
本发明涉及卫星,具体涉及一种磁浮卫星平台的融合姿态测控方法及系统。
背景技术:
1、传统卫星采用平台舱和载荷舱固连的设计方法,平台舱飞轮、陀螺等活动部件的振动将不可避免地传递至载荷舱。磁浮卫星将平台舱与载荷舱物理隔离,可以有效隔绝卫星平台的干扰,还可以通过大带宽、超高精度磁浮作动器,提升卫星平台的姿态控制水平。
2、但是,现有的磁浮卫星的机体和载体之间采用磁轴承支撑,在整星机动过程中面临以下问题:
3、1)载体自身高带宽振动抑制及避免机体振动传递影响载体控制精度;
4、2)机体自身高带宽振动抑制及避免载体振动传递影响机体控制精度;
5、3)机体和载体的相对位姿控制,以避免二体相碰。
技术实现思路
1、针对上述问题,本发明的目的是提供一种磁浮卫星平台的融合姿态测控方法及系统,通过传感器信息融合获取姿态信息,然后利用机体的力矩输出装置及磁轴承的高带宽快响应特性,实现机体-载体的二体三环姿态高精度测量控制。
2、本发明提供了一种磁浮卫星平台的融合姿态测控方法,包括:
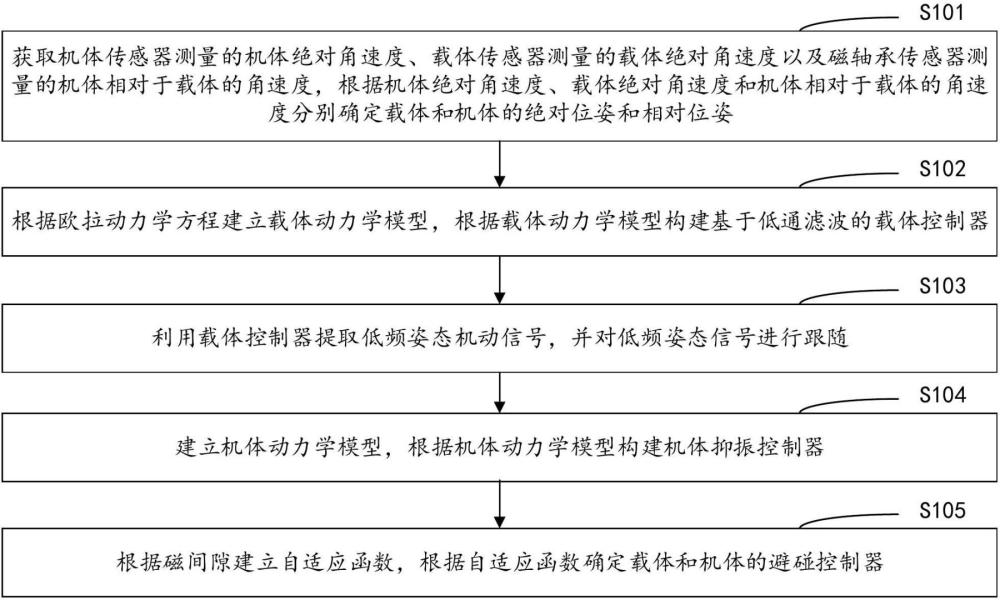
3、步骤s101,获取机体传感器测量的机体绝对角速度、载体传感器测量的载体绝对角速度以及磁轴承传感器测量的机体相对于载体的角速度,根据所述机体绝对角速度、载体绝对角速度和所述机体相对于载体的角速度分别确定载体和机体的绝对位姿和相对位姿;其中,所述机体传感器安装在机体上,所述载体传感器安装在载体上,所述磁轴承传感器安装在磁轴承上;
4、步骤s102,根据欧拉动力学方程建立载体动力学模型,根据所述载体动力学模型构建基于低通滤波的载体控制器;
5、步骤s103,利用所述载体控制器提取低频姿态机动信号,并对所述低频姿态机动信号进行跟随;
6、步骤s104,建立机体动力学模型,根据所述机体动力学模型构建机体抑振控制器;
7、步骤s105,根据磁间隙建立自适应函数,根据所述自适应函数确定载体和机体的避碰控制器。
8、在一种可能的实现方式中,步骤s101中,根据以下公式计算机体的绝对位姿:
9、;
10、其中,为机体相对于惯性空间的角速度,为机体传感器测量的机体绝对角速度,为载体传感器测量的载体绝对角速度,为磁轴承传感器测量的机体相对于载体的角速度在机体坐标系的投影,为机体坐标系到载体坐标系的转换矩阵,为传感器测量权值,且。
11、在一种可能的实现方式中,步骤s101中,根据以下公式计算载体的绝对位姿:
12、 ;
13、其中,为载体相对于惯性空间的角速度,为载体传感器测量的载体绝对角速度,为机体传感器测量的机体绝对角速度,为磁轴承传感器测量的机体相对于载体的角速度在机体坐标系的投影,为传感器测量权值,且。
14、在一种可能的实现方式中,步骤s102中,所述载体动力学模型基于如下公式建立:
15、;
16、其中,为机体转动惯量,为载体相对于惯性空间的角速度,为磁轴承对载体施加的控制力矩,为机体自身产生的振动,为机体通过磁轴承传递而来的振动。
17、在一种可能的实现方式中,步骤s102中,所述基于低通滤波的载体控制器通过如下公式实现:
18、;
19、其中,和为控制器参数,为载体相对于惯性空间的角速度,为载体指令角速度,为低通滤波器,为鲁棒项参数。
20、在一种可能的实现方式中,步骤s104中,所述机体动力学模型基于如下公式建立:
21、;
22、其中,为机体转动惯量,为机体相对于惯性空间的角速度,为机体上力矩输出装置对机体施加的控制力矩,为机体自身产生的振动;
23、在一种可能的实现方式中,步骤s104中,所述机体抑振控制器通过如下公式实现:
24、 ;
25、其中,和为控制器参数,为机体指令角速度,为鲁棒项参数,为机体相对于惯性空间的角速度。
26、在一种可能的实现方式中,步骤s105中,所述自适应函数为:
27、;
28、其中,为载体偏离中心位置的位移,为单侧磁间隙最大值。
29、在一种可能的实现方式中,所述避碰控制器通过如下公式实现:
30、;
31、其中,为避碰控制力矩,和为控制器参数,为力矩放大系数,为载体偏离中心位置的位移,为自适应函数。
32、本发明还提供了一种磁浮卫星平台的融合姿态测控系统,包括:
33、位姿确定模块,用于获取机体传感器测量的机体绝对角速度、载体传感器测量的载体绝对角速度以及磁轴承传感器测量的机体相对于载体的角速度,根据所述机体绝对角速度、载体绝对角速度和所述机体相对于载体的角速度确定载体和机体的绝对位姿和相对位姿;其中,所述机体传感器安装在机体上,所述载体传感器安装在载体上,所述磁轴承传感器安装在磁轴承上;
34、载体控制器构建模块,用于根据欧拉动力学方程建立载体动力学模型,根据所述载体动力学模型构建基于低通滤波的载体控制器;
35、提取模块,用于利用所述载体控制器提取低频姿态机动信号,并对所述低频姿态机动信号进行跟随;
36、机体抑振模块,用于建立机体动力学模型,根据所述机体动力学模型构建机体抑振控制器;
37、避碰控制器确定模块,用于根据磁间隙建立自适应函数,根据所述自适应函数确定载体和机体的避碰控制器。
38、本发明提供的磁浮卫星平台的融合姿态测控方法及系统,根据安装在机体及载体上的绝对位姿传感器及安装在磁轴承上的相对位置传感器的信息融合,确定载体和机体的绝对位姿和相对位姿;通过基于低通滤波的载体姿态跟随控制,使载体随动的同时隔绝机体传递的高频振动;基于自适应反馈控制的机体姿态控制,使机体自抵消磁轴承反作用力,避免载体振动回传的同时实现姿态机动;本发明通过融合传感器信得到姿态信息,利用机体的力矩输出装置及磁轴承的高带宽快响应特性,实现机体和载体的高精度姿态测量控制。
技术特征:
1.一种磁浮卫星平台的融合姿态测控方法,其特征在于,包括:
2.根据权利要求1所述的磁浮卫星平台的融合姿态测控方法,其特征在于,步骤s101中,根据以下公式计算机体的绝对位姿:
3.根据权利要求1所述的磁浮卫星平台的融合姿态测控方法,其特征在于,步骤s101中,根据以下公式计算载体的绝对位姿:
4.根据权利要求1所述的磁浮卫星平台的融合姿态测控方法,其特征在于,步骤s102中,所述载体动力学模型基于如下公式建立:
5.根据权利要求4所述的磁浮卫星平台的融合姿态测控方法,其特征在于,步骤s102中,所述基于低通滤波的载体控制器通过如下公式实现:
6.根据权利要求1所述的磁浮卫星平台的融合姿态测控方法,其特征在于,步骤s104中,所述机体动力学模型基于如下公式建立:
7.根据权利要求6所述的磁浮卫星平台的融合姿态测控方法,其特征在于,步骤s104中,所述机体抑振控制器通过如下公式实现:
8.根据权利要求1所述的磁浮卫星平台的融合姿态测控方法,其特征在于,步骤s105中,所述自适应函数为:
9.根据权利要求8所述的磁浮卫星平台的融合姿态测控方法,其特征在于,所述避碰控制器通过如下公式实现:
10.一种磁浮卫星平台的融合姿态测控系统,其特征在于,包括:
技术总结
本发明涉及完卫星技术领域,具体公开了一种磁浮卫星平台的融合姿态测控方法及系统,其中方法包括:S101,获取机体传感器测量的机体绝对角速度、载体传感器测量的载体绝对角速度以及磁轴承传感器测量的机体相对于载体的角速度,根据机体绝对角速度、载体绝对角速度和机体相对于载体的角速度分别确定载体和机体的绝对位姿和相对位姿;S102,根据欧拉动力学方程建立载体动力学模型,根据载体动力学模型构建基于低通滤波的载体控制器;S103,利用载体控制器提取低频姿态机动信号,并对低频姿态信号进行跟随;S104,建立机体动力学模型,根据机体动力学模型构建机体抑振控制器;S105,根据磁间隙建立自适应函数,根据自适应函数确定载体和机体的避碰控制器。
技术研发人员:任元,李磊,王卫杰,段乐强,王丽芬,张激扬,王宸宇
受保护的技术使用者:中国人民解放军战略支援部队航天工程大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!