自适用可复用空间附着捕获装置的制作方法
本发明涉及空间非合作目标捕获,尤其涉及一种自适用可复用空间附着捕获装置。
背景技术:
1、基于范德华力作用机制的仿生黏附材料具有高黏附力、可反复黏脱附等特点,而且能够适应多种材质形貌的物体表面,在空间领域有着广泛的应用前景。例如,将末端集成有仿生黏附材料的空间附着捕获装置朝着空间非合作目标弹射出,空间附着捕获装置与目标碰撞接触并建立附着连接,可实现对空间非合作目标的捕获。
2、附着捕获方法可应用于空间碎片等非合作目标的捕获上,相比传统的机械臂等刚性捕获方式,具有操作距离远、操作方式简单、对平台控制要求低、不受目标外形尺寸影响、捕获过程不会产生碎片等显著优点。
3、空间附着捕获装置捕获目标后,与目标间形成的黏附力大小与附着捕获装置末端的仿生黏附材料所受到的预压力有关,预压力来源于附着捕获装置与目标的接触碰撞,因此,碰撞力的大小将直接影响附着捕获装置与目标的黏附效果,当碰撞力过小,将不能为黏附材料提供足够的预压力,而碰撞力过大,可能导致黏附材料失效,甚至造成装置和目标损毁,因此,要求附着捕获装置能够在碰撞过程内为黏附材料提供合适预压条件。另一方面,对于空间非合作目标捕获来说,由于入轨成本较高,因此希望空间附着捕获装置具备可重复使用能力。
4、然而目前对于能够实现碰撞过程预压力控制的自适应可复用的空间附着捕获装置研究还较少。
5、中国发明专利cn103863583a提供了一种飞舌抓捕机构,包括驱动弹射机构、飞舌捕获机构、柔性索机构、解锁释放机构、轮转换装机构、瞄校系统、飞行器平台安装板;整个机构通过飞行器平台安装板与飞行器本体刚性连接;瞄校系统确定捕获目标后,驱动弹射机构推动飞舌捕获机构带动柔性索机构从飞舌弹射窗口弹出,飞舌捕获机构捕获目标,需要丢弃目标时,由解锁释放机构切断柔性索机构,驱动电机的输出轴与转动内轮环的中心轴连接,由驱动电机带动转动内轮环转动,进而带动下一个飞舌捕获机构位于飞舌弹射窗口位置,进行下一次捕获。
6、上述方案仅通过阻尼提供预压力,对于不同的目标和捕获距离,不能进行自动调节;同时,抓捕装置不能回收。
技术实现思路
1、为解决上述现有技术中存在的技术问题,本发明的目的在于提供一种的自适应可复用空间附着捕获装置,可在捕获过程中提供适当的预压条件,同时还可实现附着捕获装置的回收。
2、为实现上述发明目的,本发明提供一种自适应可复用空间附着捕获装置,包括:
3、阻尼可控缓冲单元,其一端用于与飞行器平台连接;
4、附着单元,包括基板,所述基板上设有仿生黏附材料;所述附着单元的远离所述仿生黏附材料的一端与所述阻尼可控缓冲单元的另一端连接;
5、压力检测装置,设置在所述附着单元上,用于实时测量附着捕获装置与目标接触过程中的碰撞力;
6、分离单元,设置在所述基板上,用于驱动所述仿生黏附材料与所述目标分离;
7、控制单元,与所述阻尼可控缓冲单元、所述分离单元以及所述压力检测装置电连接,用于根据所述压力检测装置的检测结果驱动所述阻尼可控缓冲单元输出预压阻尼,以及驱动所述分离单元沿所述基板伸缩设置。
8、根据本发明的一个技术方案,所述分离单元包括:
9、驱动电机,设置在所述基板的顶板上,其输出轴上设有主动齿轮;
10、从动齿轮,与所述主动齿轮啮合;
11、凸轮,与所述从动齿轮通过传动轴同轴设置,通过传动轴支架设置在所述基板的顶面上;所述基板上设有凸轮伸出孔,所述传动轴平行于所述基板设置,所述凸轮转动设置在所述凸轮伸出孔内。
12、根据本发明的一个技术方案,所述阻尼可控缓冲单元包括:
13、阻尼器壳体,其内部设有中空的阻尼介质内腔;所述阻尼介质内腔内填充有磁流变液;
14、活塞杆,其一端插入设置在所述阻尼介质内腔内,沿所述阻尼介质内腔伸缩设置;其另一端与所述附着单元连接;
15、线圈,设置在所述磁流变液内;所述线圈与所述控制单元电连接。
16、根据本发明的一个技术方案,所述阻尼器壳体的远离所述活塞杆的一端设有系绳。
17、根据本发明的一个技术方案,所述控制单元包括控制器和电源,所述控制器和所述电源设置在所述阻尼器壳体内,所述控制器与所述电源电连接;所述控制器与所述线圈电连接。
18、根据本发明的一个技术方案,还包括球铰自适应单元,包括:
19、弹簧连接板,套设在所述活塞杆上,所述压力检测装置为压力传感器,所述压力传感器设置在所述活塞杆与所述弹簧连接板之间;
20、球铰,其两端分别与所述活塞杆和所述附着单元连接;所述附着单元设置附着壳体,所述球铰与所述附着壳体的顶面铰接;
21、弹簧,其两端分别与所述弹簧连接板和所述附着壳体连接。
22、根据本发明的一个技术方案,还包括推杆复位单元,设置在所述阻尼器壳体上,包括推杆驱动装置和设置在所述推杆驱动装置上的推杆,所述推杆沿所述阻尼器壳体的靠近所述弹簧连接板的端面伸缩设置。
23、根据本发明的一个技术方案,所述弹簧为四个,在所述球铰的四周均匀布设。
24、本发明与现有技术相比,具有如下有益效果:
25、本发明提出了一种自适应可复用空间附着捕获装置,附着捕获装置集成了阻尼可控缓冲单元、附着单元、压力检测装置、分离单元和控制单元,可根据压力检测结果实时调控碰撞过程中阻尼可控缓冲单元输出的阻尼力,进而为仿生黏附材料提供合适的预压力,从而更好地黏附捕获目标;
26、分离单元设置在附着单元上,包括驱动电机、主动齿轮、从动齿轮、凸轮和传动轴,可通过驱动电机控制凸轮转动,实现附着捕获装置与目标的脱附,方便附着捕获装置的回收复用。
27、本发明提供的附着捕获装置结构简单,易于实现,相比传统的机械臂等刚性捕获方式,具有操作距离远、操作方式简单、对平台控制要求低、不受目标外形尺寸影响、捕获过程不会产生碎片等显著优点。
28、阻尼可控缓冲单元上设置推杆复位单元,可实现活塞杆的复位,方便阻尼可控缓冲单元的复用;附着单元与阻尼可控缓冲单元通过球铰自适应单元连接,球铰自适应单元包括球铰和弹簧,可提高附着捕获装置对目标的姿态容差适应能力,使附着捕获装置即使在倾斜碰撞目标时也能很好地贴合目标表面。
技术特征:
1.一种自适应可复用空间附着捕获装置,其特征在于,包括:
2.根据权利要求1所述的自适应可复用空间附着捕获装置,其特征在于,所述分离单元包括:
3.根据权利要求2所述的自适应可复用空间附着捕获装置,其特征在于,所述阻尼可控缓冲单元(4)包括:
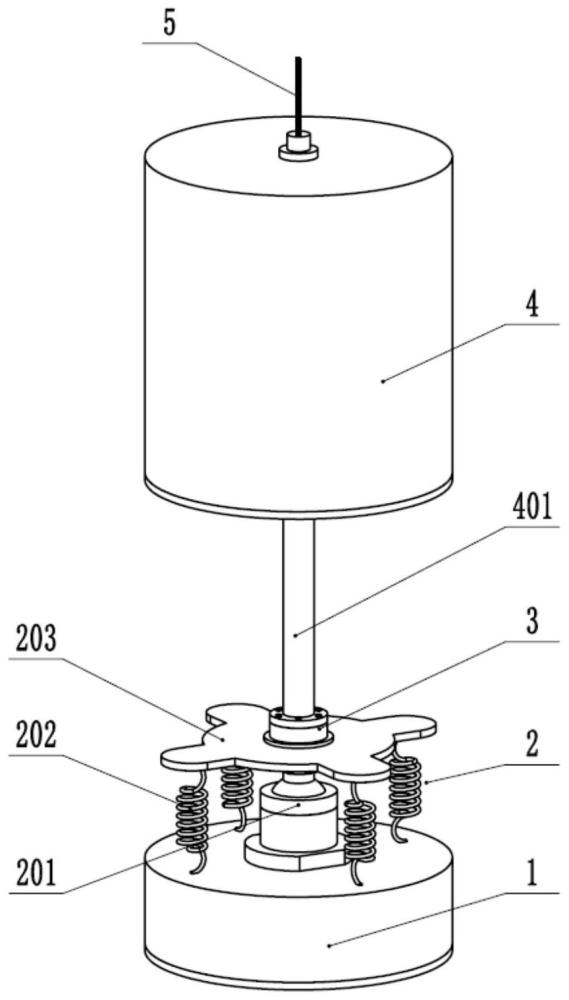
4.根据权利要求3所述的自适应可复用空间附着捕获装置,其特征在于,所述阻尼器壳体的远离所述活塞杆(401)的一端设有系绳(5)。
5.根据权利要求3所述的自适应可复用空间附着捕获装置,其特征在于,所述控制单元包括控制器(8)和电源(9),所述控制器(8)和所述电源(9)设置在所述阻尼器壳体内,所述控制器(8)与所述电源(9)电连接;所述控制器(8)与所述线圈(402)电连接。
6.根据权利要求3所述的自适应可复用空间附着捕获装置,其特征在于,还包括球铰自适应单元(2),包括:
7.根据权利要求6所述的自适应可复用空间附着捕获装置,其特征在于,还包括推杆复位单元(6),设置在所述阻尼器壳体上,包括推杆驱动装置和设置在所述推杆驱动装置上的推杆(601),所述推杆(601)沿所述阻尼器壳体的靠近所述弹簧连接板(203)的端面伸缩设置。
8.根据权利要求6所述的自适应可复用空间附着捕获装置,其特征在于,所述弹簧(202)为四个,在所述球铰(201)的四周均匀布设。
技术总结
本发明涉及一种自适应可复用空间附着捕获装置,包括:阻尼可控缓冲单元、附着单元、压力检测装置、分离单元和控制单元,附着单元的基板上设有仿生黏附材料;附着单元的一端与阻尼可控缓冲单元连接;压力检测装置,用于实时测量附着捕获装置与目标接触过程中的碰撞力;分离单元用于驱动仿生黏附材料与目标分离;控制单元可根据压力检测装置的检测结果驱动阻尼可控缓冲单元输出预压阻尼,以及驱动分离单元沿基板伸缩设置。本发明根据压力检测结果控制阻尼可控缓冲单元提供可控可变的阻尼力,可向附着单元提供适当的预压力,提高了目标的捕获效果;附着单元可通过分离单元与目标分离,实现附着捕获装置的回收复用。
技术研发人员:解正友,陈新龙,朱孟萍,郭继唐,陈大可,任雅静,高原
受保护的技术使用者:中国空间技术研究院
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!