一种给定远火点的气动捕获进入条件空间搜索方法
本发明涉及航空航天,具体为一种给定远火点的气动捕获进入条件空间搜索方法。
背景技术:
1、气动捕获是气动辅助变轨的一种形式,该技术利用目标天体大气的阻力作用减小航天器的速度,从而实现轨道捕获,有效解决了行星捕获轨道设计中燃料消耗和时间成本的矛盾。对于希望航天器被捕获后进入目标轨道的行星探测任务,气动捕获通常只需一次进入大气,将双曲线轨道速度减小为椭圆轨道速度实现捕获——航天器以双曲线轨道进入大气,利用大气减速并消耗能量,同时控制航天器的轨迹,当减速到合适的状态时以椭圆轨道速度出大气形成初始捕获轨道,然后以较小的燃料消耗变轨进入目标轨道。
2、气动辅助变轨的概念最早于二十世纪六十年代被提出,此后专家学者对气动捕获和气动减速技术进行了研究。其中对于气动捕获技术,已有的研究方向包括分析其可行性和安全性、航天器热设计和气动参数对减速效果的影响、任务目标轨道和航天器参数对进入走廊宽度的影响等。研究结果表明在行星探测任务中使用气动捕获技术可节省大量的燃料,进而采用更小、更廉价的火箭发射航天器,同时可缩短转移时间,增加有效载荷质量,大大降低探测任务对速度增量的要求,尤其在航天器质量较大的载人行星探测任务上有明显优势。
3、气动捕获技术中,进入条件求取是任务设计的重要部分。气动捕获的进入条件研究与入口处的状态量、飞行器特征均有关,根据研究的具体问题其内容可能包括进入速度与进入航迹角关系、升阻比与进入航迹角宽度等。有关进入条件的研究按分析方法的不同主要分为两类:一类从气动捕获任务的可行性出发,总结气动捕获需满足的基本约束条件,如出口速度满足减速要求、飞行中满足热流要求、载人任务满足宇航员能承受的过载要求等,并从任务的基本约束中计算气动捕获走廊;另一类则从任务设计目标出发,典型目标包括以出口条件或燃耗为目标,在计算中引入仿真过程求取进入条件,该类的分析的仿真过程又分为使用常值倾侧角和可变倾侧角两类。
4、对于不同的任务要求,气动捕获的设计目标也不同,其中目标轨道(停泊轨道)高度为气动捕获任务中一类典型的任务目标,能直接根据目标轨道约束求取适宜的进入条件是该类设计问题的期望。此外在通过仿真求取气动捕获轨迹进入条件的过程中,对控制量的处理是气动捕获轨迹设计的要点之一,典型的做法是将控制量倾侧角作为常值处理,也有部分研究引入预测校正制导修正过程中的倾侧角,当控制量在飞行过程中不能改变或不能取为最优控制序列,则无法保证该组进入条件对任务目标的可行性,进而无法准确反映进入条件的边界,导致轨道捕获成功率低。
技术实现思路
1、本发明的目的是:针对现有技术中无法准确反映进入条件的边界,导致轨道捕获成功率低的问题,提出一种给定远火点的气动捕获进入条件空间搜索方法。
2、本发明为了解决上述技术问题采取的技术方案是:
3、一种给定远火点的气动捕获进入条件空间搜索方法,包括以下步骤:
4、步骤一:获取大气层高度rair以及目标圆轨道高度
5、步骤二:获取描述气动捕获过程中大气层内飞行部分的动力学模型;
6、步骤三:基于步骤二中的动力学模型,对飞行过程中各参量建立约束;
7、步骤四:基于步骤三建立的约束,设置气动捕获速度v1,并设置初始条件,即令r0=rair、v0=v1、γ0∈[-π/2,π/2],之后设置终端条件,即令rf=rair,之后设置终端约束为飞行器出口时形成椭圆轨道,即轨道能量ε小于零,且形成的椭圆轨道的远拱点高度ha等于目标圆轨道高度即之后利用动力学模型建立以最小化入口航迹角为优化指标的轨迹规划问题,并记录所得入口航迹角为γmin1,其中,r0为入口高度,rf为出口高度,γ0为入口航迹角,v0为目标轨道的入口速度;
8、步骤五:设置气动捕获速度v1,并设置初始条件,即令r0=rair、v0=v1、γ0∈[-π/2,π/2],之后设置终端条件,即令rf=rair,之后设置终端约束为飞行器出口时形成椭圆轨道,且形成的椭圆轨道的远拱点高度ha等于目标圆轨道高度即之后利用动力学模型建立以最大化入口航迹角为优化指标的轨迹规划问题,并记录所得入口航迹角为γmax1,并根据γmin1和γmax1,得到此时入口航迹角宽度δγ1;
9、步骤六:设定速度步长δv0,并根据δv0和v1得到v2,即v2=v1-δv0,之后令入口速度v0=v2,重复步骤四和步骤五,得到入口航迹角边界γmin2、γmax2,以及入口航迹角宽度δγ2;
10、步骤七:根据δv0和v2得到v3,即v3=v2-δv0,之后令入口速度v0=v3,重复步骤四和步骤五,得到入口航迹角边界γmin3、γmax3,以及入口航迹角宽度δγ3;
11、步骤八:利用δγ1、δγ2以及δγ3之间的变化选取新的步长δv1,并令δv0=δv1,重复步骤六和步骤七;
12、步骤九:重复步骤八,不断更新速度步长,直到所得入口航迹角宽度为0或问题不存在可行解,此时的入口速度则为该目标轨道下的最小进入速度vmin;
13、步骤十:令v2=v1+δv0、v3=v2+δv0,重复步骤四至步骤九,进而得到该目标轨道下的最大进入速度vmax;
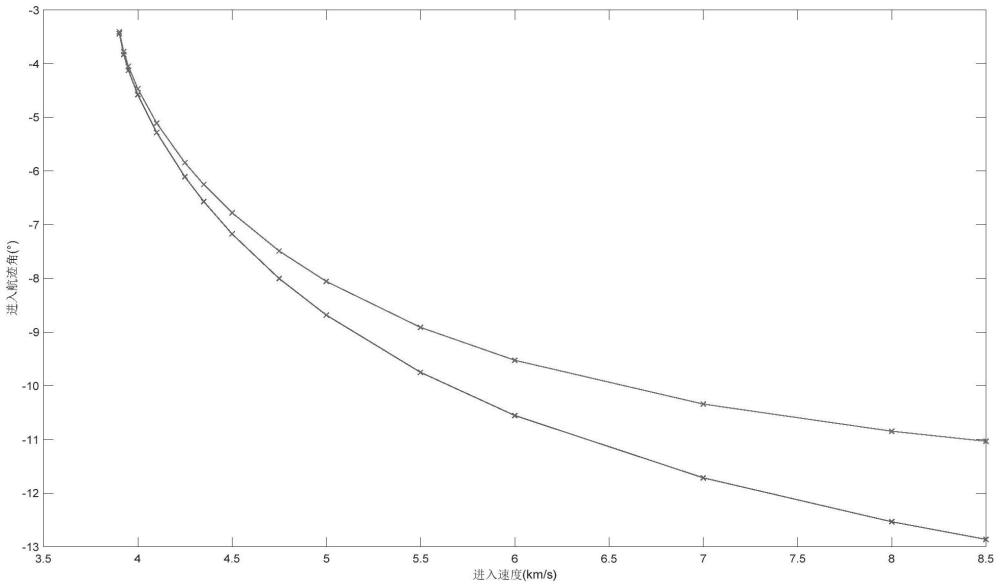
14、步骤十一:计算vmin至vmax之间,每一进入速度所对应的入口航迹角宽度,所有入口航迹角宽度构成的入口航迹角区间,即为目标轨道下的进入条件;
15、步骤十二:在步骤四和步骤五的轨迹规划问题中引入过载约束n和热流约束n≤nmax,重复步骤四至步骤十一,得到目标轨道的气动捕获进入条件可行域区间,其中,nmax和为约束限制。
16、进一步的,所述动力学模型表示为:
17、
18、
19、
20、其中,r为轨道半径,v为速度,γ为航迹倾角,m为飞行器质量,g为中心天体重力加速度,l为升力,d为阻力,ρ为大气密度,s为参考面积,cl为升力系数,cd为阻力系数,为高度状态量的变化率,为速率状态量的变化率,为航迹角状态量的变化率,σ为控制量倾侧角。
21、进一步的,所述步骤三中对飞行过程中各参量建立约束具体为:
22、设定倾侧角的约束范围[σmin,σmax],其中,σmin为控制量倾侧角σ的最小值,σmax为控制量倾侧角σ的最大值,同时对状态量设置约束范围,设置边界约束入口rin与出口高度rout为大气层高度,即rin=rout=rair,入口航迹角不做约束。
23、进一步的,所述轨道能量ε表示为:
24、
25、其中,vf为出口速度,μ为引力常数。
26、进一步的,所述步骤四中形成的椭圆轨道的远拱点高度ha等于目标圆轨道高度表示为:
27、
28、其中,rmar为火星半径,a为出口轨道半长轴,ra为远拱点半径,γf为出口处的航迹角。
29、进一步的,所述步骤四中轨迹规划问题描述为:
30、u*=argminj(u,γ)
31、j(u,γ)=γ(t0)
32、所述步骤五中轨迹规划问题描述为:
33、u*=argminj(u,γ)
34、j(u,γ)=-γ(t0)
35、其中,u*为最优控制量序列,j(·)为待优化的量,u为控制量序列,γ为航迹角,γ(t0)为初始时刻航迹角。
36、进一步的,所述步骤三中约束包括动力学约束、边界约束以及过程约束;
37、所述动力学约束、边界约束表示为:
38、r0=rair
39、v0=vin
40、
41、
42、所述过程约束表示为:
43、r∈[rd,rair]
44、v∈[vmin,vmax]
45、
46、σ∈[σmin,σmax]
47、其中,rmar为火星半径,a为出口轨道半长轴,rd为最低高度阈值,vin为进入速度。
48、进一步的,所δv1表示为:
49、δv1=cδv0
50、其中,c为缩放系数,
51、进一步的,所述过载约束n表示为:
52、
53、进一步的,所述热流约束表示为:
54、
55、其中,rn为航天器头部曲率半径,kq、n、m为拟合系数。
56、本发明的有益效果是:
57、本技术给出一种针对给定目标轨道高度的气动捕获任务的进入条件空间搜索方法,基于轨迹优化问题求解了不同进入速度条件在控制量倾侧角可变情况下的进入航迹角范围,通过可调节的控制量和直接的优化指标保证了所求取航迹角边界的完整性和正确性。在进入条件空间搜索中,通过取值向两侧延伸的方式搜索问题的求解边界进而确定了进入速度的边界,从进入速度和进入航迹角两方面更全面地反映了针对特定任务的进入条件空间可行域,进而可以准确反映进入条件的边界,提升了轨道捕获的成功率。此外在搜索中利用变步长计算,根据进入条件区间变化率修正步长进而修正算例密度,减少了计算步骤的同时获得了更能够体现真实情况的条件区间。
58、在本技术提出的规划问题中,除基本约束外还可根据任务设计需要加入其他约束,如热流密度、过载等,该类约束反映了飞行器材料结构与任务是否载人等对飞行器环境耐受能力的影响,本技术根据不同约束条件规划所得的进入条件范围,能够适应各种任务设计需要。
- 还没有人留言评论。精彩留言会获得点赞!