环形棒状包装容器移送装置的制作方法
1.本发明涉及能够与固定收纳数量无关地调节提取数量的环形棒状包装容器移送装置,并且涉及如下的环形棒状包装容器移送装置:在收纳从棒形包装装置排出的棒状包装容器并提取(withdrawals)所收纳的棒状包装容器时,在收纳和提取过程中使用发挥伺服(servo)功能的伺服机构,使得一次收纳棒状包装容器的数量和一次提取的数量之差导致的不稳定的移送状态实现稳定化,从而可以与所收纳的棒状包装容器的固定数量无关地在提取时自由变更提取数量。
背景技术:
2.具有可以填充粉末或液相内容物的棒形收容部的棒状包装容器由纵向形成的纵向粘结面和以规定间隔横向形成的横向粘结面构成。在这种由纵向粘结面和横向粘结面形成的收容部收容粉末或液相内容物。
3.像这样,通过自动制作棒状包装容器的过程来连续供给包装纸,而所供给的包装纸形成为圆形,且纵向形成的边缘部分得到热熔敷,来形成纵向粘结面,从而制成管形态,并且,在每个规定间隔实现横向热熔敷,从而形成横向粘结面来制作。
4.在相当于棒状包装容器的下部的部分得到热熔敷来形成横向粘结面的状态下,向棒状包装容器的内部供给规定量的粉末或液相内容物,之后,使相当于棒状包装容器的上部的部分得到热熔敷来形成横向粘结面,使得棒状包装容器的内部得到密封。在以规定的间隔形成的横向粘结面实现切割,来制作单位棒状包装容器。
5.在棒形包装装置中制作的棒状包装容器一次排出多个。为了变更以这种方式排出的棒状包装容器的数量,需要改变棒形包装装置的结构,因此,从规定的棒形包装装置排出的棒状包装容器的数量通常为固定的数量。
6.按固定的数量排出的棒状包装容器被投入于箱子等,并供给到使用场所。这种投入于箱子等的棒状包装容器的数量可根据箱子等的大小而有所不同。即,尽管棒形包装装置所排出的数量固定,也会产生投入于箱子等的棒状包装容器的数量根据箱子大小而有所不同的问题。
7.因此,以往需要有人根据所需的数量来一一清点按固定的数量排出的棒状包装容器的数量,并重新投入于箱子等。由此,需要额外的人力和时间,从而增加非效率性。
8.用于解决这种问题的现有技术是韩国公开实用新型第20-1991-0014217号,下文对其进行考察。
9.现有技术涉及自动收纳棒糖包装容器的自动收纳装置,并涉及与在糖自动包装机械的排出口的前方使用引导板划分多个区间的移送式输送机和斗式(bucket)输送机相关联的装置。
10.但是,在现有技术中仅公开了简单具有与所排出的棒状包装容器的数量相匹配的箱子等,并收集所排出的棒状包装容器来简单地投入于箱子等的装置的技术特征。
11.即,属于在投入于箱子的棒状包装容器的数量和棒形包装装置所排出的棒状包装
容器的数量不同的情况下无法适用的技术特征。即使适用,也只能使用与棒形包装装置所排出的棒状包装容器的数量相匹配的箱子。
12.用于投入到箱子的棒状包装容器的数量不同于棒形包装装置所排出的棒状包装容器的数量的情况下,依旧存在需要重新一一清点数量后投入于箱子的问题。
技术实现要素:
13.发明所要解决的问题
14.为了解决上述现有技术的问题,提出将棒形包装装置所排出的棒状包装容器自动投入于箱子等的装置。
15.具体地,提供环形棒状包装容器移送装置,在上述环形棒状包装容器移送装置中,即使棒形包装装置一次排出的棒状包装容器的数量和投入于箱子等一次投入的棒状包装容器的数量不同,也使一次收纳棒状包装容器的数量和一次提取棒状包装容器的数量之差导致的不稳定的移送状态稳定化,从而可以与所收纳的棒状包装容器的固定的数量无关地在提取时自由变更提取数量。
16.用于解决问题的方案
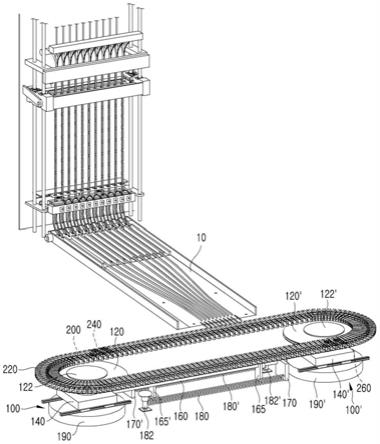
17.为了解决上述现有技术的问题,本发明的环形棒状包装容器移送装置包括:一对伺服机构100、100’,以留有规定的间隔的方式设置;环链200,安装于上述一对伺服机构100、100’,并在上述一对伺服机构100、100’之间以履带形态移动;以及多个棒状包装容器收纳台220,在连续安装于上述环链200的上端面的状态下,收纳从棒形包装装置的排出部10排出的多个棒状包装容器。
18.上述一对伺服机构100、100’分别包括:伺服旋转体120、120’,能够进行旋转,并安装有上述环链200;前进后退移动台140、140’,能够进行前进移动或后退移动,且固定结合有上述伺服旋转体120、120’的中心轴122、122’;规定长度的杆160、160’,上述杆160、160’的一端与上述前进后退移动台140、140’固定结合;以及弹簧180、180’,上述弹簧180、180’的一端为与规定的固定体182、182’固定结合的状态,上述弹簧180、180’的另一端与上述杆160、160’的另一端相连接。
19.优选地,以上述杆160、160’的另一端为基准,上述弹簧180、180’的一端所固定结合的上述规定的固定体182、182’位于上述杆160、160’的一端所处的方向。
20.优选地,上述一对伺服机构100、100’的各个上述杆160、160’及上述弹簧180、180’在上述一对伺服机构100、100’中位于任一个伺服机构100的前进后退移动台140和另一个伺服机构100’的前进后退移动台140’之间。
21.优选地,本发明还包括:与上述环链200进行齿轮啮合的第一伺服齿轮240和第二伺服齿轮260。
22.从上述棒形包装装置的排出部10排出的多个棒状包装容器被收纳于多个上述棒状包装容器收纳台220后,收纳有棒状包装容器的多个上述棒状包装容器收纳台220通过上述第一伺服齿轮240的运行来进行前进移动,从多个上述棒状包装容器收纳台220提取收纳于多个上述棒状包装容器收纳台220的多个棒状包装容器后,未收纳棒状包装容器的状态的多个上述棒状包装容器收纳台220通过上述第二伺服齿轮260的运行来进行前进移动。
23.通过上述第一伺服齿轮240的一次运行来进行前进移动的收纳有棒状包装容器的
多个上述棒状包装容器收纳台220的数量和通过上述第二伺服齿轮260的一次运行来进行前进移动的未收纳棒状包装容器的状态的多个上述棒状包装容器收纳台220的数量互不相同。
24.优选地,本发明还包括:固定台190、190’,安装有上述前进后退移动台140、140’,且上述前进后退移动台140、140’以能够进行前进移动或后退移动的方式得到安装;连接台170、170’,在上述连接台170、170’的一侧固定结合有上述杆160、160’的另一端,在上述连接台170、170’的另一侧固定结合有上述弹簧180、180’的另一端;以及杆引导部165、165’,在被固定的状态下,被上述杆160、160’贯通,并引导上述杆160、160’的移动。
25.在上述固定台190、190’中,随着上述前进后退移动台140、140’因上述弹簧180、180’的弹力而向一侧方向移动,固定结合于上述前进后退移动台140、140’的上述杆160、160’向与上述前进后退移动台140、140’的移动方向相同的方向移动,并因上述杆160、160’的移动而使上述连接台170、170’卡在上述杆引导部165、165’来限制上述杆160、160’及上述前进后退移动台140、140’的移动。
26.发明效果
27.通过上述的解决问题的手段,即使排出并一次收纳于棒状包装容器收纳台的棒状包装容器的数量和从棒状包装容器收纳台一次提取并投入于箱子等的棒状包装容器的数量不同,也可以在一对伺服机构向稳定的方向反馈由这种数量之差引起的不稳定的移送状态,从而能够以稳定的移送状态继续移送棒状包装容器。
28.由此,即使棒形包装装置所排出的棒状包装容器的数量为固定的数量,且以与棒状包装容器的固定的排出数量存在差异的数量提取棒状包装容器,也可以维持稳定的移送状态,并且,可以与棒形包装装置所排出的棒状包装容器的固定的数量无关地根据投入棒状包装容器的箱子等的大小来改变棒状包装容器的提取数量。
29.因此,不需要追加人力及时间,并且,在具有这种环形棒状包装容器移送装置的状态下,可以与任何棒形包装装置无关地改变投入于箱子等的棒状包装容器的数量,从而增加作业的效率性。
附图说明
30.图1为简要示出本发明的环形棒状包装容器移送装置的图。
31.图2为示出从侧面观察本发明的环形棒状包装容器移送装置的状态的图。
32.图3为示出在本发明中去除棒状包装容器收纳台的状态下的一个伺服机构的图。
33.图4及图5为示出在本发明中为了说明伺服机构的运行而简化的运行状态的图。
34.附图标记的说明
35.10:棒形包装装置的排出部
36.100、100’:一对伺服机构
37.120、120’:一对伺服旋转体
ꢀꢀꢀꢀꢀꢀꢀꢀ
122、122’:中心轴
38.140、140’:一对前进后退移动台
39.160、160’:一对杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
165、165':一对杆引导部
40.170、170’:一对连接台
41.180、180’:一对弹簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
182、182’:一对固定体
42.190、190’:一对固定台
43.200:环链
44.220:棒状包装容器收纳台
45.240:第一伺服齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
260:第二伺服齿轮。
具体实施方式
46.以下,参照附图对本发明的方法的优选实施例进行说明。在这过程中,附图所示的线的厚度或结构要素的大小等可以为了说明的明确性和方便性而以夸张的方式示出。
47.并且,后述的术语是考虑到本发明中的功能来定义的术语,这可以根据使用人员或运用人员的意图或惯例而有所不同。因此,应基于本说明书全文的内容来对这种术语进行定义。
48.在本发明中,伺服(servo)是指环形棒状包装容器移送装置从稳定的状态因运行而变动为不稳定的状态的情况下,向稳定的方向进行反馈,从而以维持稳定化状态的方式进行自动控制,而伺服机构是指发挥这种自动控制功能的机构。
49.参照图1至图3对结构要素进行说明。
50.本发明的环形棒状包装容器移送装置包括一对伺服机构100、100’及环链200。
51.一对伺服机构100、100’以留有规定的间隔,并通过环链200来连接的状态设置。通过这种环链200的移动,从棒形包装装置的排出部10排出的棒状包装容器被移送。棒状包装容器与收容粉末或液相状态的内容物或者与收容何种形态的内容物无关地包括其包装容器的形态为棒形的所有情况。对此将进行后述。
52.一对伺服机构100、100’以通过环链200来连接的状态留有规定的间隔,并可以在维持这种规定的间隔的情况下进行前进移动或后退移动。在维持规定的间隔的情况下进行以前进移动或后退移动,对环形棒状包装容器移送装置的不稳定的状态进行反馈,从而以稳定的状态进行维持。
53.一对伺服机构100、100’共包括一对伺服旋转体120、120’、前进后退移动台140、140’、杆160、160’、弹簧180、180’及固定台190、190’。
54.一对固定台190、190’相互留有规定的间隔来进行设置,并以固定于设有一对伺服机构100、100’的规定的场所的状态进行设置。在这种固定台190、190’安装有可进行前进移动或后退移动的前进后退移动台140、140’。
55.具体地,由规定的主体形成的前进后退移动台140、140’的下端安装于上述的固定台190、190’,而可以在固定台190、190’和前进后退移动台140、140’的下端之间具有引导部以及位于这种引导部的内侧的轴承等机构,使得这种前进后退移动台140、140’的下端可以进行前进移动或后退移动。
56.一对前进后退移动台140、140’可以在安装于上述的固定台190、190’的状态下进行前进移动或后退移动。因将要进行后述的弹簧180、180’的弹力而维持向外侧推挤出的规定的力量。即,维持向一对前进后退移动台140、140’相互远离的方向推挤出的规定的力量。通过将要后述的履带形态的环链200来相连接,从而以维持规定的间隔的方式进行设置。
57.在一对前进后退移动台140、140’固定结合有伺服旋转体120、120’的中心轴122、122’。伺服旋转体120、120’以中心轴122、122’为轴进行旋转。通过中心轴与前进后退移动
台140、140’相结合的伺服旋转体120、120’随着前进后退移动台140、140’的前进移动或后退移动来进行移动和旋转。
58.在这种一对伺服旋转体120、120’安装环链200。因此,环链200、200’是履带的形态,在上述环链200、200’的一侧包围一个伺服旋转体120的侧面,在上述环链200、200’的另一侧包围另一伺服旋转体120’的侧面。由此,一对伺服旋转体120、120’通过将要后述的弹簧180、180’来维持彼此远离的规定的力量,但因这种环链200而以维持规定的间隔的方式进行设置。
59.伺服旋转体120、120’的侧面可以为齿轮形态,以便卡住环链200,并且,环链200卡在这种齿轮形态的侧面,环链200通过将要后述的第一伺服齿轮240及第二伺服齿轮260的运行来沿着伺服旋转体120、120’的侧面移动,由此,伺服旋转体120、120’进行旋转。
60.一对杆160、160’以规定长度形成。上述一对杆160、160’的一端与前进后退移动台140、140’固定结合。通过前进后退移动台140、140’的前进移动或后退移动来实现杆160、160’的前进移动或后退移动。
61.一对杆160、160’中的任一个杆160为与任一个前进后退移动台140固定结合并向另一个前进后退移动台140’所处的方向长长地设置的状态。同样,另一个杆160’为与另一个前进后退移动台140’固定结合,并向任一个杆160所处的方向长长地设置的状态。
62.在杆160、160’的一端与前进后退移动台140、140’固定结合的状态下,杆160、160’的另一端与连接台170、170’固定结合。连接台170、170’为将要后述的弹簧180、180’的另一端固定结合的状态,结果,连接台170、170’对杆160、160’和弹簧180、180’进行连接。弹簧180、180’的弹力经由连接台170、170’向杆160、160’传递,结果,向前进后退移动台140、140’传递。在这种连接台170、170’的一侧固定结合可移动的杆160、160’的另一端,在上述连接台170、170’的另一侧结合具有弹力的弹簧180、180’的另一端,结果,连接台170、170’能够以与杆160、160’和弹簧180、180’相结合的状态进行移动。
63.一对弹簧180、180’的一端与规定的固定体182、182’固定结合,一对弹簧180、180’的另一端与上述的连接台170、170’的另一侧相结合。
64.在一对弹簧180、180’的另一端与连接台170、170’固定结合的状态下,弹簧180、180’维持拉长的状态,在始终维持要缩短的弹力的同时,在上述一对弹簧180、180’的一端与规定的固定体182、182’固定结合的状态下,通过连接台170、170’的移动使弹簧180、180’拉长或缩短。
65.在一对杆160、160’长长地设置的状态,一对杆160、160’所贯通的一对杆引导部165、165’以固定于规定的场所的状态进行设置。在杆160、160’贯通这种杆引导部165、165’的状态下,杆160、160’进行前进移动或后退移动。杆引导部165、165’引导杆160、160’向规定的方向进行前进移动或后退移动。
66.虽然杆160、160’贯通杆引导部165、165’,但无法贯通以规定的面积形成的连接台170、170’。因此,随着杆160、160’向规定的方向移动规定距离以上,在杆引导部165、165’卡住连接台170、170’的情况下,杆160、160’无法继续向规定的方向移动,由此,前进后退移动台140、140’的移动受到限制。
67.在环链200以履带形态安装于一对伺服旋转体120、120’的状态下,连接一对伺服旋转体120、120’。因此,在环链200的环内设置一对伺服旋转体120、120’。任一个伺服旋转
体120在由环链200形成的环内位于一侧,另一个伺服旋转体120’在由环链200形成的环内位于另一侧,一对伺服旋转体120、120’因弹簧180、180’的弹力而向相互远离的方向维持力量,而一个伺服旋转体120和另一个伺服旋转体120’可在环链200的环内形成极和极的状态下进行设置。
68.棒状包装容器收纳台220连续安装于环链200的上端面。从棒形包装装置的排出部10同时排出的多个棒状包装容器同时被收纳于多个棒状包装容器收纳台220。
69.环链200在安装于一对伺服旋转体120、120’的状态下形成环。在这种环链200的上端面连续安装有棒状包装容器收纳台220。因此,通过环链200的履带形态的移动来安装棒状包装容器收纳台220。
70.在一个棒状包装容器收纳台220安装一个棒状包装容器。当通过环链200的移动使棒状包装容器收纳台220接近棒形包装装置的排出部10时,从棒形包装装置的排出部10同时排出的固定数量的多个棒状包装容器同时被收纳于数量与所排出的棒状包装容器的数量相同的多个棒状包装容器收纳台220。
71.环链200的移动通过第一伺服齿轮240及第二伺服齿轮260的运行而实现移动。第一伺服齿轮240和第二伺服齿轮260在互不相同的位置与环链200齿轮啮合。
72.第一伺服齿轮240在由环链200形成的环中位于与棒形包装装置的排出部10相接触的环部分。
73.如上所述,从棒形包装装置的排出部10排出的棒状包装容器为固定数量的多个。这种多个棒状包装容器同时被相同数量的棒状包装容器收纳台220收纳。
74.之后,环链200通过第一伺服齿轮240的运行来进行前进移动,而通过一次第一伺服齿轮240的运行来进行前进移动的棒状包装容器收纳台220的数量与同时被收纳于棒状包装容器收纳台220的棒状包装容器的数量相同。
75.作为一例,在8个棒状包装容器被收纳于棒状包装容器收纳台220后,通过一次第一伺服齿轮240的运行,8个棒状包装容器收纳台220沿着环链200移动。这种8个棒状包装容器的数量为在棒形包装装置中制作的固定的数量。如上所述,为了变更所排出的棒状包装容器的数量,需要改变棒形包装装置的结构,而改变棒形包装装置的结构需要诸多时间和费用而并不容易,因而暂时使所排出的棒状包装容器为固定的状态。
76.第二伺服齿轮260在由环链200形成的环中位于从棒状包装容器收纳台220提取棒状包装容器的地点的环部分。
77.从棒状包装容器收纳台220提取的棒状包装容器的数量可根据这种棒状包装容器所投入的箱子等的大小而有所不同。
78.在上述的一例中,同时被棒状包装容器收纳台220收纳的棒状包装容器虽然为8个,但为了投入于箱子等而提取的数量可以为8个或4个或2个。不同于同时所收纳的棒状包装容器的数量,在需要提取4个棒状包装容器的情况下,在棒状包装容器收纳台220提取4个棒状包装容器,之后,4个棒状包装容器收纳台220通过一次第二伺服齿轮260的运行来进行前进移动。即,在提取4个棒状包装容器后,通过一次第二伺服齿轮260的运行,使提取之后棒状包装容器未被收纳的状态的4个棒状包装容器收纳台220前进移动。
79.结果,如同所示的一例,通过一次第一伺服齿轮240的运行来进行前进移动的收纳有棒状包装容器的多个棒状包装容器收纳台220的数量和通过一次第二伺服齿轮260的运
行来进行前进移动的未收纳有棒状包装容器的状态的多个棒状包装容器收纳台220的数量可以互不相同。
80.在未具有一对伺服机构100、100’的状态下,一侧的向第一伺服齿轮240前进移动的棒状包装容器收纳台220的数量变得更多,另一侧的通过第二伺服齿轮260前进移动的棒状包装容器收纳台220的数量变得更少,由此,一侧的环链200变得松弛,另一侧的环链200变得紧凑,结果,移送装置无法正常运行。
81.在未具有一对伺服机构100、100’的状态下,第一伺服齿轮240的一次运行时间(作为一例,10秒钟)和第二伺服齿轮260的一次运行时间(作为一例,5秒钟)互不相同,因此,若在第一伺服齿轮240的一次运行时间内,第二伺服齿轮260运行2次,则总的运行时间可以变得相同,并且,即使实现第二伺服齿轮260的一次运行,然后直接实现之后的一次运行,也因其时间间隔而发生环链200的松弛和紧凑,结果,移送装置无法正常运行。
82.为了在这种不稳定的状态下向稳定的方向进行反馈,本发明的环形棒状包装容器移送装置具有一对伺服机构100、100’。
83.参照图4及图5对本发明的环形棒状包装容器移送装置的运行进行说明。
84.作为用于简化说明的一例,从棒形包装装置的排出部10排出的棒状包装容器为8个,因此,属于8个棒状包装容器同时被收纳于8个棒状包装容器收纳台220的状态,相反,就提取棒状包装容器的部分而言,在收纳有棒状包装容器的状态的8个棒状包装容器收纳台220中同时提取的棒状包装容器假设为4个。即,虽然从棒形包装装置同时排出的棒状包装容器为8个,但需要同时投入于箱子等的棒状包装容器为4个的情况。
85.这种一例仅用于简化说明,并不用于限制本发明的实施范围或保护范围。
86.图4为在同时排出8个且被收纳于棒状包装容器收纳台220的状态下,通过一次第一伺服齿轮240的运行使8个棒状包装容器收纳台220同时前进移动的状态,但就提取的部分而言,在8个棒状包装容器收纳台220中提取4个棒状包装容器,并通过一次第二伺服齿轮260的运行使4个棒状包装容器收纳台220前进移动的状态。
87.这种状态为环链200向一侧(图4中的左侧)倾斜的状态。在一侧(图4中的左侧)变得松弛的环链200随着伺服机构100向一侧(图4中的左侧)移动而使变得松弛的环链200变回正常状态。
88.伺服机构100的前进后退移动台140经由杆160来接收弹簧180的弹力。以杆160的另一端为基准,与弹簧180的一端固定结合的规定的固定体182向杆160的一端所处的方向设置。在弹簧180固定于固定体182的状态下维持要缩短的力量,结果,这种弹簧180的要缩短的力量经由杆160来对前进后退移动台140产生影响。因此,前进后退移动台140持续处于维持向外侧推挤出的力量的状态。在这种状态下,若环链200变得松弛,则因前进后退移动台140的要推挤出的力量而进行移动,并使环链200恢复正常状态。
89.前进后退移动台140、伺服旋转体120、杆160及连接台170向环链200变得松弛的一侧(图4中的左侧)方向移动,且弹簧180缩短。此时,在杆160移动规定程度的距离以上的情况下,连接台170卡在杆引导部165,从而无法继续向一侧(图4中的左侧)移动,因此,前进后退移动台140的移动也受到限制。
90.通过第二伺服齿轮260的运行,向另一侧(图4中的右侧)方向前进移动的棒状包装容器收纳台220的数量少于向一侧(图4中的左侧)方向前进移动的棒状包装容器收纳台220
的数量。因此,通过第一伺服齿轮240的运行,8个棒状包装容器收纳台220向一侧(图4中的左侧)前进移动,同时,通过第二伺服齿轮260的运行,4个棒状包装容器收纳台220向另一侧(图4中的右侧)前进移动,由此,在另一侧(图4中的右侧),环链200变得紧凑。像这样,借助变得紧凑的环链200的力量,伺服旋转体120’、前进后退移动台140’、杆160’及连接台170'向一侧(图4中的左侧)方向移动,弹簧180'变长。结果,在另一侧(图4中的右侧),解除环链200的紧凑,并恢复正常状态。
91.图5为在图4的一例中,在不存在第一伺服齿轮240的运行的状态下,已经提取并未收纳有棒状包装容器的4个棒状包装容器收纳台220结束前进移动,之后重新通过第二伺服齿轮260的运行使提取棒状包装容器的剩余4个棒状包装容器收纳台220前进移动的状态。
92.图5表示在图4中一对伺服机构100、100’已经向一侧(图5中的左侧)方向倾斜的状态下重新向另一侧(图5中的右侧)倾斜并恢复到原状态的状态。
93.在一对伺服机构100、100’已经向一侧(图5中的左侧)方向倾斜的状态下,在没有第一伺服齿轮240运行的情况下,仅第二伺服齿轮260进行一次运行。由此,在提取的部分中,4个棒状包装容器收纳台220向另一侧(图5中的右侧)移动,使另一侧(图5中的右侧)的环链200变得松弛。相反,在一侧(图5中的左侧),4个棒状包装容器收纳台220向另一侧(图5中的右侧)方向前进移动,环链200变得紧凑。
94.在这种状态下,一对伺服机构100、100’向另一侧(图5中的右侧)移动,并使环链200恢复正常状态。
95.伺服机构100’的前进后退移动台140’经由杆160’来接收弹簧180’的弹力。以杆160’的另一端为基准,与弹簧180’的一端固定结合的规定的固定体182’向杆160’的一端所处的方向设置。在弹簧180’固定于固定体182’的状态下维持要缩短的力量,结果,这种弹簧180’的要缩短的力经由杆160’来对前进后退移动台140’产生影响。因此,前进后退移动台140’持续处于维持向外侧推挤出的力量的状态。在这种状态下,若环链200变得松弛,则因前进后退移动台140’的要推挤出的力量而进行移动,并使环链200恢复正常状态。
96.前进后退移动台140’、伺服旋转体120’、杆160’及连接台170’向环链200变得松弛的另一侧(图5中的右侧)方向移动,且弹簧180’缩短。此时,在杆160’移动规定程度的距离以上的情况下,连接台170’卡在杆引导部165’,从而无法继续向另一侧(图5中的右)移动,因此,前进后退移动台140的移动也受到限制。
97.随着向另一侧(图5中的右侧)前进移动的4个棒状包装容器收纳台220的数量,在一侧(图5中的左侧),环链200变得紧凑。像这样,借助变得紧凑的环链200的力量,伺服旋转体120、前进后退移动台140、杆160及连接台170'向另一侧(图5中的右侧)方向移动,弹簧180变长。结果,在一侧(图5中的左侧),解除环链200的紧凑,并恢复正常状态。
98.优选地,根据图4及图5所示的内容,考虑到一对伺服机构100、100’的设置方便性及运行的效率性,一对杆160、160’、一对连接台170、170’、一对弹簧180、180’及一对杆引导部165、165’位于一对前进后退移动台140、140’之间,即,位于一个前进后退移动台140和另一个前进后退移动台140’之间。
99.以上,本说明书以本发明所属技术领域的普通技术人员可以容易地理解和再现本发明的方式参照附图所示的实施例进行了说明,但这仅为例示,只要是本发明所属技术领域的普通技术人员,就可以理解可从本发明的实施例中实施多种变形及等同的其他实施
例。因此,本发明的保护范围应由权利要求书而定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1