改进的用于显示信息的系统的制作方法
1.本发明涉及一种改进的用于向自走式操作机器的操作者显示信息的系统。
背景技术:
2.已知显示单元安装在伸缩臂叉车或“伸缩式升降机”的舱室的面板中并且向操作者示出为了机器的正确控制所必要的信息,诸如负载图、平移速度、由分布在车辆上的传感器测量的数据以及尤其是表示车辆的稳定状态的指标。
3.操作者经常报告的一个问题是在他们操作伸缩式升降臂时,对于操作者来说必须小心地观察升降设备和由升降设备承载的负载,二者都是为了正确地执行所进行的操作并且为了明显的安全原因;然而,出于完全相同的原因并且准确地说当操作者操作臂时,他们必须监控显示器以便知道由显示器显示的各个参数的变化。
4.对于伸缩臂叉车的操作者来说,这种情况是相当不方便的,这不仅对作业效率有不利的影响,而且还可能导致执行操纵中的错误。
技术实现要素:
5.构成本发明的基础的技术目的是提供一种克服上述现有技术的限制的自走式操作机器。
6.所指出的技术目的通过操作一种自走式操作机器来实现。该自走式操作机器配备有舱室和用于向位于所述舱室中的操作者显示信息的显示系统,其中,所述显示系统包括至少一个能移动的显示元件。
附图说明
7.如附图所示,在所提出的机器的优选实施例的非限制性描述中,本发明的其他特征和优点将更加显而易见,在附图中:
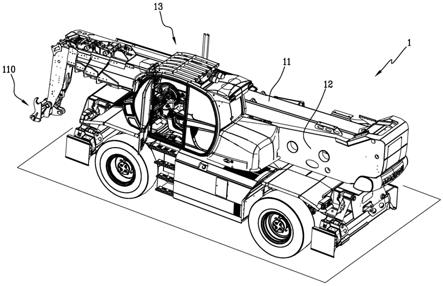
8.图1是根据本发明的机器的轴测图;
9.图2是根据第一实施例的图1的机器的舱室的内部的轴测图;以及
10.图3和图4是根据本发明的第二实施例的处于两个不同的操作构造的图1的机器的舱室的内部的视图。
具体实施方式
11.参考附图,参考标号1整体上表示根据本发明的自走式操作机器。
12.更详细地,根据本发明的机器1优选是伸缩臂叉车并且可以是旋转式的(诸如图1的机器)或固定式的,或者也可以是铰接型的。
13.所提出的机器1包括可在轮子上移动的托架或底盘、驾驶员舱室、伸缩式升降臂11,该伸缩式升降臂可以安装在可旋转平台12上,该可旋转平台如果存在的话还具有舱室13,臂在其远端处配备有耦接装置110,该耦接装置是由申请人制作的在伸缩臂叉车中常用
的类型,这允许更换设备111及其与机器1的液压和电子设备的连接。
14.如图3和图4中示意性地示出的,术语设备111指的是用于接合负载2的配件(诸如叉形件、横向转运装置、绞机、抓持器等)和用于使人升降以及根据需要使负载(诸如保持架)升降的配件。
15.臂11铰接到可旋转平台12,以便在液压汽缸或类似的致动器的致动下在下位置与上位置之间竖直地振荡,该下位置是基本上水平的,而在上位置中,臂11接近于竖直。
16.臂11可延伸并可收回,并且更准确地,该臂包括多个部段,这些部段一个插入在另一个中、彼此同轴并且设计成沿着轴向方向平移。
17.臂11的伸长和收回也由一个或多个液压汽缸或其他致动器产生。
18.平台12的旋转也优选由液压致动器产生,该液压致动器例如与机架相关联,以相同的方式,优选地,使装备相对于其接合部中的一个或多个移动的致动器是液压的。
19.液压致动器受到安装在机器1上的电动液压分配器的支配,该电动液压分配器由位于舱室13中的命令部通过已知方法来控制。
20.在实践中,根据本发明的机器1包括位于舱室13中的命令部,诸如由操作者o(见图2)致动的操作杆、踏板、按钮等;通过作用在命令部上来产生从分配器14接收的信号,然后调节臂11的、设备111的和平台12的(或其他可移动元件的)的致动器的操作。
21.本发明还涉及驱动致动器是电动机械的和非液压型的情况。
22.根据本发明的一个重要的方面,机器1包括用于向位于舱室13中的操作者o显示信息的系统,该系统包括至少一个可移动显示元件3。
23.该可移动显示元件3特别设计成向操作者o显示与机器的稳定状态相关的信息,具体涉及机器所经受的倾覆力矩即时多么接近危险阈值,超出该危险阈值则存在对臂的力矩的限制或抑制。
24.实际上,伸缩臂叉车配备有用于控制倾覆力矩(例如,纵向力矩)的系统并且具有表示邻近危险状态的程度的指示。
25.该指示可以例如是位于显示器上的例如由一系列led限定的刻度条。
26.此外,显示元件3还可以向操作者o显示上述现有技术中由传统显示器承载的信息和数据,也就是说,通过非限制性示例,诸如负载图、平移速度、由在车辆上分布的传感器测量的数据等。
27.根据具体实施例,如图2所示,显示元件3是“物理”显示器,即,该显示元件是在电子显示装置31中制备的屏幕,例如触摸屏幕或“被动”型屏幕,该电子显示装置包括壳体、用户界面(除了触屏功能的电子器件之外,或作为触屏功能的电子器件的替代方案,用户界面可包括按钮、杆或类似的命令部)和一个或多个微处理器或微控制器,该一个或多个微处理器或微控制器控制机器1的操作数据的显示和通过上述用户界面传递的信息和指令。
28.如果显示元件3是物理显示器,则其还可以通过用于显示上述信息的一些器件的组合来限定,例如,屏幕加上位于上述显示装置31处的一个或多个物理指示器。
29.更详细地,在本发明的具体的非限制性实施例中,还可以存在由显示器的上述顺序性形成的刻度条,这允许操作者由于检测到的倾覆力矩而立刻了解接近危险状态的程度。
30.例如,该条包括不同颜色的led;考虑到绿色led、黄色led和红色led之间的顺序性
给出了具有潜在风险状态多么即将发生的直观概念。
31.另外地或可替代地,刻度指示可以在屏幕上“虚拟地”呈现,也就是说,该刻度指示不是led等形式,而是图形指标。
32.根据本发明的显示元件3的一个重要方面是该显示元件可手动和/或自动地移动,以便允许其定位在舱室13内部位于(尤其是在使用操作臂11期间)对操作者o来说便利的位置处。
33.出于这个目的,根据第一实施例,根据本发明的显示系统包括支撑显示装置31并允许移动的机构。
34.例如,该机构可由沿着引导件移动的一个或多个铰接臂或一个或多个托架构成,该引导件例如沿着舱室13的直立部延伸或具有其他解决方案。
35.如果移动是手动的,则该机构可根据操作者o的动作而重新构造,在这种情况下,操作者通过手将配备有显示器3的显示装置31拉动到期望位置,并且一旦显示装置位于对于伸缩臂叉车的操作者o来说最便利的位置处,该机构还能够将显示装置31保持在位。
36.根据实施例,如图3和图4示意性地示出的,显示系统包括位于舱室13内部的发光的投射装置32,该投射装置被设计成使上述显示元件3投在表面s(例如,舱室13的玻璃或挡风玻璃的内表面)上,从而被反射并被操作者o看到。
37.在实践中,在这种情况下,投射装置32发送表示显示单元3的光束,该光束具有对于控制伸缩臂叉车1来说有用的信息,特别是对于执行伸缩式升降臂11的操纵来说有用的信息。
38.投射装置32被设计成用于调节沿反射表面s投射的显示器3的位置,也就是说,该投射装置在手动激活的情况下能够使其根据操作者o的指令来移动,或者自动移动,自动移动是下文讨论的选项。
39.在这种情况下,显示器3不是“物理”的,即,该显示器不是屏幕而是“虚拟的”,这是因为该显示器是由投射器32发射的反射光束限定的。
40.在本发明的可以在“物理”显示器和“虚拟”显示器的情况下都被致动的一个具体版本中,所讨论的显示器3自动移动。
41.在这种情况下,所提出的机器1首先可以包括用于检测与操作臂11的位置相关的至少一个参数并用于根据该位置参数来产生位置信号的器件。
42.检测器件可以包括一个或多个位置传感器,该一个或多个位置传感器被设计成确定负载2(或者在任何情况下,设备111)相对于基准(该基准例如由机器1的托架构成)或操作者o在舱室13中的位置或其他位置的相对位置。
43.这些传感器中的一个可以测量臂11与托架之间的角度,并且另一个可以测量臂11的滑动或伸长,并且这两个传感器可以包括适当地连接到杆以确定角度或连接到缆线以确定长度的编码器或者包括在驱动汽缸中的位置传感器或者其他类型的传感器。
44.在该版本中,机器1还可包括处理器件,该处理器件被设计成接收上述位置信号并且包括定位模块,该定位模块被构造成根据移动信号产生定位信号并被设计成建立显示元件3的目标位置。
45.应当注意,在本描述中,处理器件可以包括处理单元,出于清楚且完整地描述功能的目的,该处理单元在此处被分成单独的功能模块。
46.在实践中,处理单元可以由单个电子装置构成,该电子装置也是在这种类型的机器上常见的类型,诸如控制单元,该控制单元被适当地编程以执行所描述的功能;各个模块可以对应于形成编程装置的一部分的硬件单元和/或软件。
47.可替代地或另外地,这些功能可由可分布有上述功能模块的多个电子装置来执行。
48.一般而言,处理单元可以具有一个或多个微处理器或微控制器,以用于执行包含在存储器模块中的指令,并且上述功能模块还可以基于它们所在的网络架构而分布在多个本地或远程计算器上。
49.根据具有由于移动机构而移动的物理显示器3的实施例,该移动机构可以连接到移动器件(例如电动机),该移动器件被设计成接收上述移动信号并相应地致动移动机构。
50.在具有虚拟显示器3的解决方案的情况下,投射装置32被设计成接收移动信号并因此使投射的显示元件3移动,从而改变光束的投射方向。
51.优选地,处理器件的定位模块被构造成产生移动信号,该移动信号被设计成将显示元件3定位在这样的位置:在该位置中,相对于舱室13中的操作者o的视角,该显示元件保持靠近设备111或负载2并且优选在旁边。
52.例如,显示器3的位置可以用从操作者o的视角与设备111或负载2的图像整合的方式来调节;换言之,考虑到从操作者o的位置指向显示器3和负载2(或设备111)的视线,这些可以具有基本上恒定的角距离。
53.在虚拟显示器3的情况下,其投射在挡风玻璃的表面s上的图像可以相对于负载2(或设备111)的图像的相对距离保持在基本上恒定的距离处,如由风挡玻璃内部的操作者o所看到的。
54.具体地,操作臂11能够升高和降低或延伸和收回,从操作者o的角度来说,这通常意味着负载2和承载负载的设备111被看到升高或降低。
55.出于这个原因,如果设备111不执行负载2的横向移动但例如是固定叉形件或固定保持架,则显示器3将根据臂11的移动而自动升高和降低,其行程是根据负载2(或设备111)的从操作者o的视角观察到的竖直偏移来调节的,使得观察显示器3的方向总是接近于指向负载2的方向,即,在能够一眼看到二者的距离处。
56.在一种情况下,显示装置31将升高和降低(物理显示器),在另一种情况下,显示装置将是构成虚拟显示器3的光束在风挡的内表面上的反射。
57.另一方面,如果设备111还具有横向移动,例如振荡绞机或旋转式叉形件等,则显示器3的位置也将根据负载2(或设备111)的位置在横向(即,水平)方向上调节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1