一种破袋装置的制作方法
1.本发明涉及一种垃圾集中收集装置,具体地说是一种垃圾集中收集并对湿垃圾进行破袋投放的装置。
背景技术:
2.目前,垃圾分类、撤桶定时定点投放垃圾进行得有段时间了,最近又遇到了新的问题。就是「湿垃圾要破袋再投放」这件事。很多网友在社交主页发表状态称:支持垃圾分类,但是在具体工作实施过程中,屡出状况。好不容易适应了在规定时间固定地点投放垃圾的节奏。现在又要湿垃圾破袋投放,破袋过程中难免会碰到湿垃圾,如果不套袋改用容器倾倒,又要清洗并拿回家,太麻烦了。不过,在现在垃圾分类处置的前提下,湿垃圾如果前期不破袋,那么在末端处置中,一方面塑料袋等杂质容易卡住湿垃圾处理设备,二来难降解的塑料袋也会大大影响湿垃圾的整体发酵,降低处置效率,所以湿垃圾是一定要破袋投放的!但是,目前少有一款能方便破袋的垃圾收集装置。
技术实现要素:
3.为了克服上述缺陷,本发明提供一种破袋装置,该装置包括壳体、割刀、电磁铁、围栏、控制模块,该装置可挂在垃圾桶的后方,装有割刀的围栏置于垃圾桶口的上方,投放时只要提着湿垃圾袋放入破袋装置的围栏里,垃圾袋底就会被割刀自动割破,无须用手去捏袋底倒垃圾,可免洗手,为推动湿垃圾破袋投放提供了一款实用安全的破袋工具。
4.本发明解决其技术问题所采取的技术措施是,壳体的前面设门,门上安装控制开关,壳体的顶上设把手,便于提携,壳体的一侧接入电源线,为壳体的电磁铁和控制模块供电,所述割刀的刀柄上部、电磁铁和控制模块安装在壳体内,割刀延伸至壳体下部,所述围栏设置在壳体下部,用于将割刀围在围栏内,以策安全;壳体的背面设置挂攀,用于将壳体挂在垃圾桶口上。
5.所述割刀的头部可设置成尖刀形、锯齿形、耙形、钩形,割刀设为左刀和右刀,所述左刀的上部与壳体固定,所述左刀和右刀的刀柄通过短轴连接成剪刀状,短轴与壳体固定,所述短轴作为支点,支点下部的刀柄是阻力臂,支点上部的刀柄是动力臂,两条刀柄的下端向前折成“u”字形,所述“u”字形的末端制成尖刀状作为割刀刀刃部。静态时,两个割刀合拼在一起,动态时,两个割刀可张合,所述割刀用于割破垃圾袋的底部;所述右刀的动力臂上部长于左刀的动力臂,所述右刀的上部一侧用弹簧与壳体连接,拉动右刀上端向左运动,右刀的上部的另一侧连接电磁铁的拉杆,用于拉动右刀向右运动,电磁铁动作时右割刀绕短轴旋转,割刀的刀刃部会与左刀的刀刃部远离和靠近;。
6.所述控制的感应探头安装在栏框的中下部,用于探测围栏内是否有垃圾袋存在;控制模块的测温探头安装在栏框的上部,控制模块的感应区域在围栏范围内,控制模块设定破袋程序和安全程序,通过控制模块设置一定的阈值,来实现对割刀的执行标的,包括以下程序:破袋程序是指垃圾袋的底部投入围栏内,垃圾袋底部碰触到刀状构件时,控制模块
通过激光或者红外线或者碰触来感应,当控制模块接收到感应信号后,对电磁铁发出动作指令,电磁铁对割刀作n次的推拉动作,在做割袋的同时并伴有拍打垃圾袋的动作,n次割袋动作后,需将空垃圾袋向上提出,刀状构件才能复位,以策安全,当空垃圾袋向上提出后,刀状构件复位待命,并预备第二次割袋动作;所述安全程序中设置测温探头(现有技术),其目的是;测量围栏范围内是否有热源进入,如人的肢体部分(手),不小心伸入围栏内,热感应探头将测得的信息传递给控制模块,控制模块立即锁住割刀的动作指令,以确保安全。
7.使用时,将破袋装置挂在垃圾桶上,携割刀的围栏置于垃圾桶口上,投放者只要将湿垃圾袋提着置于围栏内,等待割刀n次动作后,抖一下空垃圾袋并向上提出,投入其它垃圾桶内即可。这样,人机联动,简单、干净、安全地完成一湿垃圾破袋投放的过程。
8.由于设置了破袋装置,不需要用手去倒提袋底倒垃圾,不会弄脏手,也无需携家庭垃圾桶投放,因此,可免洗手和洗桶,不仅省水,而且干净,从而达到湿垃圾破袋安全投放的目的。
9.本发明的有益效果是,方便湿垃圾的安全破袋投放,可免设洗涤器械,不仅省水,而且干净,结构简单。
附图说明
10.下面结合附图对发明作进一步说明。
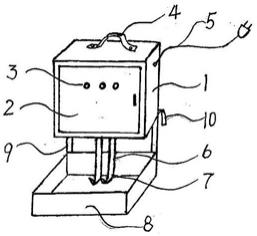
11.图1是一种破袋装置的结构示意图。
12.图2是刀的结构和控制模块的安装位置示意图。图3是种破袋投放程序流程图。
13.图中,1、壳体,2、门,3、开关,4、把手,5、电源线,6、刀柄,7、割刀,8、围栏,9、档杆,10、挂攀,11、左刀,12、右刀,13、右刀,14、刀刃部,15、弹簧,16、电磁铁,17、拉杆,18、控制模块,19、感应探头,20、测温探头。
具体实施方式
14.在图1中,壳体1的前面设门2,门上安装控制开关3,壳体的顶上设把手4,便于提携,壳体的一侧接入电源线5,为壳体的电磁铁和控制模块供电,所述割刀的刀柄6上部、电磁铁和控制模块安装在壳体内,割刀7延伸至壳体下部,所述围栏8通过档杆9安装在壳体下部,用于将割刀围在围栏内,以策安全;壳体的背面设置挂攀10,用于将壳体挂在垃圾桶口上。
15.在图2中,所述割刀7的头部可设置成尖刀形、锯齿形、耙形、钩形,割刀设为左刀11和右刀12,所述左刀的上部与壳体固定,所述左刀和右刀的刀柄通过右刀13连接成剪刀状,短轴与壳体固定,所述短轴作为支点,支点下部的刀柄是阻力臂,支点上部的刀柄是动力臂,两条刀柄的下端向前折成“u”字形,所述“u”字形的末端制成尖刀状作为割刀的刀刃部14;所述右刀的动力臂上部长于左刀的动力臂,所述右刀的上部一侧用弹簧15与壳体连接,拉动右刀上端向左运动,右刀的上部的另一侧连接电磁铁16的拉杆17,用于拉动右刀向右运动,电磁铁动作时右刀绕短轴旋转,割刀的刀刃部会与左刀的刀刃部远离和靠近;所述控制模块18的感应探头19安装在栏框8的中下部,用于探测围栏内是否有垃圾袋存在;控制模块的测温探头20安装在栏框8的上部,控制模块的感应区域在围栏范围
内。
16.在图3中,是控制模块设定的破袋程序和安全程序,通过控制模块设置一定的阈值,来实现对割刀的执行标的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1