机器人门卫的制作方法
机器人门卫
背景技术:
1.本文公开的主题一般涉及运送系统的领域,并且特别地涉及用于协助位于运送系统附近的个体的方法和设备。
2.对于某些个体来说,取决于个体在建筑物中位于何处,诸如例如电梯系统、自动扶梯系统和移动步道之类的运送系统以及其他建筑物位置有时可能难以在建筑物内定位。
技术实现要素:
3.根据实施例,提供了一种使用机器人门卫(concierge)系统来协助个体的方法。该方法包括:使用分配给所述运送系统的机器人的传感器系统来确定所述个体需要协助;以及通过所述机器人来协助个体。
4.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:使用所述传感器系统来确定所述个体需要信息;以及通过所述机器人向所述个体提供所述信息。
5.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:从建筑物系统管理器传送所述信息;以及在所述机器人处接收所述信息。
6.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:使用所述机器人从建筑物系统管理器请求所述信息;从所述建筑物系统管理器传送所述信息;以及在所述机器人处接收所述信息。
7.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:所述信息与方向、目录(directory)和时间表(schedule)中的至少一个有关。
8.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:从请求信息的所述个体接收问题;以及通过所述机器人向所述个体提供所述信息。
9.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:使用所述传感器系统的麦克风或所述传感器系统的相机从请求信息的所述个体接收问题;以及通过所述机器人向所述个体提供所述信息。
10.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:所述问题由所述个体使用由所述相机捕获的手势语言来传达。
11.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:从请求信息的所述个体接收问题;以及通过以下中的至少一个向所述个体提供所述信息:可听地使用所述机器人的扬声器,视觉上使用所述机器人的显示装置,以及视觉上使用所述机器人的臂。
12.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:确定所述个体需要方向;以及向所述个体提供方向。
13.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:确定所述个体需要方向;以及通过以下中的至少一个向所述个体提供方向:可
听地使用所述机器人的扬声器,视觉上使用所述机器人的显示装置,以及视觉上使用所述机器人的臂。
14.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:确定所述个体需要到达目的地的方向;以及指示所述机器人将所述个体引导到所述目的地。
15.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:确定所述个体想要使用所述运送系统;以及使用所述机器人来为所述个体控制所述运送系统的操作。
16.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:确定所述个体想要使用所述运送系统,所述运送系统是包括电梯轿厢的电梯系统;以及使用所述机器人来为所述个体呼叫所述电梯轿厢。
17.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:确定所述个体想要使用所述运送系统,所述运送系统是包括电梯轿厢的电梯系统;以及使用所述机器人,通过使用所述机器人的臂或通过与所述电梯系统的调度器和所述电梯系统的控制器中的至少一个通信,来保持所述电梯系统的门打开以便所述个体进入所述电梯轿厢。
18.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:确定所述个体想要使用所述运送系统,所述运送系统是包括电梯轿厢的电梯系统;以及通过延伸所述机器人的臂以保持所述电梯系统的门打开以便所述个体进入所述电梯轿厢,来使用所述机器人保持所述电梯系统的门打开以便所述个体进入所述电梯轿厢,其中所述臂与所述电梯系统的门反向(reversal)传感器相互作用,或者并且所述臂按压所述电梯系统的门打开按钮。
19.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:使用所述传感器系统的麦克风、所述传感器系统的显示装置或手势语言,来询问所述个体是否需要信息。
20.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:使用所述传感器系统的麦克风、所述传感器系统的显示装置或手势语言,来询问所述个体是否想要使用所述运送系统。
21.除了本文所述的特征中的一个或多个特征之外,或者作为备选方案,另外的实施例可以包括:使用分配给运送系统的机器人的传感器系统来检测所述个体。
22.根据另一实施例,提供了体现在非暂时性计算机可读介质上的计算机程序产品。该计算机程序产品包括指令,所述指令当由处理器执行时,使处理器执行操作,所述操作包括:使用分配给运送系统的机器人的传感器系统来确定所述个体需要协助;以及通过机器人来协助所述个体。
23.本公开的实施例的技术效果包括使用机器人门卫系统来帮助需要协助的个体。
24.除非另有明确指出,否则前述特征和元素可采用各种组合方式来组合而没有排他性。根据以下描述和附图,这些特征和元素及其操作将变得更加明显。然而,应当理解,下面的描述和附图旨在本质上是说明性和解释性的,并且是非限制性的。
附图说明
25.本公开通过示例的方式示出并且不限于附图,在附图中,相同的参考标号表示相似的元素。
26.图1是可以采用本公开的各种实施例的电梯系统的示意图;图2示出了根据本公开的实施例用于协助个体的机器人门卫系统的示意图;以及图3是根据本公开的实施例使用图2的机器人门卫系统来协助个体的方法的流程图。
具体实施方式
27.图1是电梯系统101的透视图,所述电梯系统101包括电梯轿厢103、配重105、受拉构件107、导轨109、机器111、位置参考系统113和控制器115。电梯轿厢103和配重105通过受拉构件107彼此连接。受拉构件107可包括或配置成例如绳索、钢缆和/或涂层钢带。配重105配置成平衡电梯轿厢103的负载,并且配置成促进电梯轿厢103在电梯井117内并沿着导轨109相对于配重105同时并且在相对方向上移动。
28.受拉构件107接合机器111,所述机器111是电梯系统101的高架(overhead)结构的部分。机器111配置成控制电梯轿厢103和配重105之间的移动。位置参考系统113可安装在电梯井117顶部处的固定部分上,例如安装在支撑件(support)或导轨上,并且可配置成提供与电梯轿厢103在电梯井117内的位置有关的位置信号。在其他实施例中,位置参考系统113可直接安装到机器111的移动组件,或者可位于如本领域中已知的其他位置和/或配置中。位置参考系统113可以是如本领域中已知的用于监测电梯轿厢和/或配重的位置的任何装置或机构。例如,但不限于,位置参考系统113可以是编码器、传感器或其他系统,并且可包括速度感测、绝对位置感测等,如本领域技术人员将领会的那样。
29.控制器115如所示出的那样位于电梯井117的控制器室121中,并且配置成控制电梯系统101以及特别是电梯轿厢103的操作。例如,控制器115可向机器111提供驱动信号,以控制电梯轿厢103的加速、减速、调平、停止等。控制器115还可配置成从位置参考系统113或任何其他期望的位置参考装置接收位置信号。当在电梯井117内沿着导轨109向上或向下移动时,电梯轿厢103可停止在一个或多个层站125处,如由控制器115所控制的那样。虽然在控制器室121中示出,但是本领域技术人员将领会,控制器115能够位于和/或配置在电梯系统101内的其他位置或定位中。在一个实施例中,控制器可远程定位或位于云中。
30.机器111可包括马达或类似的驱动机构。根据本公开的实施例,机器111配置成包括电驱动马达。用于马达的电力供应可以是任何电源,包括电力网,所述电源与其他组件组合供应给马达。机器111可包括曳引轮,所述曳引轮向受拉构件107施加力以使电梯轿厢103在电梯井117内移动。
31.虽然利用包括受拉构件107的绕绳系统来示出和描述,但采用使电梯轿厢在电梯井内移动的其他方法和机构的电梯系统可采用本公开的实施例。例如,实施例可用于使用线性马达将运动施加到电梯轿厢的无绳电梯系统中。实施例还可用于使用液压升降机将运动施加到电梯轿厢的无绳电梯系统中。图1仅是出于说明性和解释性目的而呈现的非限制性示例。
32.在其他实施例中,系统包括在楼层之间和/或沿着单个楼层移动乘客的运送系统。
这样的运送系统可包括自动扶梯、人员移动装置(people mover)等。因此,本文中描述的实施例不限于电梯系统,诸如在图1中所示出的电梯系统。在一个示例中,本文中公开的实施例可以是可适用的运送系统(诸如电梯系统101)以及运送系统的运送设备(诸如电梯系统101的电梯轿厢103)。在另一个示例中,本文中公开的实施例可以是可适用的运送系统(诸如自动扶梯系统)以及运送系统的运送设备(诸如自动扶梯系统的移动楼梯)。
33.电梯系统101还包括一个或多个电梯门104。电梯门104可整体地附连到电梯轿厢103和/或电梯门104可位于电梯系统101的层站125上。本文中公开的实施例可适用于整体地附连到电梯轿厢103的电梯门104和/或位于电梯系统101的层站125上的电梯门104两者。电梯门104打开以允许乘客进入和离开电梯轿厢103。
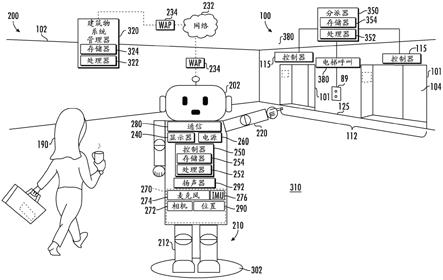
34.现在,在继续参考图1的情况下参考图2,示出根据本公开的实施例的机器人门卫系统200。应当领会,虽然特定系统在示意框图中被单独定义,但是系统中的每个或任何可经由硬件和/或软件以其他方式组合或分离。机器人门卫系统200包括机器人202和/或与机器人202无线通信。理解的是,示出了一个机器人202,本文中公开的实施例可适用于具有一个或多个机器人202的机器人门卫系统200。机器人202配置成向个体190提供协助。个体190可以正在寻找电梯系统100或到达其他任何地方的方向。在一个示例中,机器人202可以配置成识别个体190并将个体190引导到电梯系统101。在另一个示例中,机器人202可以配置成从个体190接收问题并对该问题进行响应。问题可以是“我在哪里可以找到电梯”并且机器人202可以通过以口头回答响应、利用机器人202的臂220指引和/或朝向电梯系统101移动使得个体190可以跟随,来将个体引导到电梯系统101。
35.理解的是,虽然将电梯系统101用于示例性说明,但是本文中公开的实施例可应用于将运送设备用于运输的其他运送系统,诸如例如自动扶梯、移动步道等。
36.如图2中所示,建筑物102内的建筑物电梯系统100可包括电梯组112中组织的多个不同的单个电梯系统101。电梯系统101包括电梯轿厢103(为简单起见在图2中未示出)。理解的是,虽然两个电梯系统101用于示例性说明,但是本文中公开的实施例可应用于具有一个或多个电梯系统101的建筑物电梯系统100。另外,为了便于说明,图2中示出的电梯系统101被组织成电梯组112,但是理解的是,电梯系统101可被组织成一个或多个电梯组112。电梯组112中的每个可包含一个或多个电梯系统101。电梯组112中的每个还可位于不同的层站125上。
37.图2的建筑物中的层站125可以具有位于电梯系统101附近的电梯呼叫装置89。电梯呼叫装置89将电梯呼叫380传送到建筑物电梯系统100的调度器(dispatcher)350。应领会,虽然调度器是在示意框图中单独定义的,但是调度器350可经由硬件和/或软件组合在任何控制器115或其他装置中。电梯呼叫380可包括电梯呼叫380的源。电梯呼叫装置89可包括目的地输入选项,其包括电梯呼叫380的目的地。电梯呼叫装置89可以是按钮和/或触摸屏并且可被手动或自动激活。例如,电梯呼叫380可通过个体190或机器人202经由电梯呼叫装置89输入电梯呼叫380来发送。电梯呼叫装置89也可以是配置成传送电梯呼叫380的移动装置,并且机器人202可以拥有所述移动装置以传送电梯呼叫380。移动装置可以是智能电话、智能手表、膝上型计算机、或本领域技术人员已知的任何其他移动装置。
38.控制器115可以是组合的、本地的、远程的、云等。调度器350可以是本地的、远程的、云等。调度器350与每个电梯系统101的控制器115通信。备选地,可存在对所有电梯系统
101是公共的并且控制所有电梯系统101的单个控制器,而不是如图2中所示的两个单独的控制器115。调度器350可以是配置成选择要分配给电梯呼叫380的最佳电梯轿厢103的“群组”软件。调度器350管理与电梯组112有关的电梯呼叫装置89。
39.调度器350配置成控制和协调多个电梯系统101的操作。调度器350可以是电子控制器,其包括处理器352和相关联的存储器354,相关联的存储器354包括计算机可执行指令,所述计算机可执行指令当由处理器352执行时,使处理器352执行各种操作。处理器352可以是但不限于广泛的一系列可能架构中的任何一种的单处理器或多处理器系统,包括同构或异构布置的图形处理单元(gpu)硬件、数字信号处理器(dsp)、专用集成电路(asic)、中央处理单元(cpu)或现场可编程门阵列(fpga)。存储器354可以是但不限于随机存取存储器(ram)、只读存储器(rom)或其他电子、光、磁或任何其他计算机可读介质。
40.调度器350与建筑物电梯系统100的电梯呼叫装置89通信。调度器350配置成接收从电梯呼叫装置89传送的电梯呼叫380。调度器350配置成管理从电梯呼叫装置89进入的电梯呼叫380,并且命令一个或多个电梯系统101响应于电梯呼叫380。
41.机器人202可配置成使用控制器250控制机器人202的操作,来完全自主地操作。控制器250可以是电子控制器,其包括处理器252和相关联的存储器254,所述相关联的存储器254包括计算机可执行指令,所述计算机可执行指令当由处理器252执行时,使处理器252执行各种操作。处理器252可以是但不限于广泛的一系列可能架构中的任何一种的单处理器或多处理器系统,包括同构或异构布置的图形处理单元(gpu)硬件、数字信号处理器(dsp)、专用集成电路(asic)、中央处理单元(cpu)或现场可编程门阵列(fpga)。存储器254可以是诸如例如随机存取存储器(ram)、只读存储器(rom)、或其他电子、光、磁或任何其他计算机可读介质之类的存储装置。
42.机器人202包括配置成向机器人202供电的电源260。电源260可包括能量收集装置和/或能量存储装置。在实施例中,能量存储装置可以是机载(onboard)电池系统。电池系统可包括但不限于锂离子电池系统。机器人202可配置成移动到外部电源(例如,电插座),从而为电源260充电。
43.机器人202包括扬声器292,所述扬声器292配置成向位于机器人202附近的个体190传递可听的词、音乐和/或声音。机器人202还包括显示装置240,所述显示装置240配置成向位于机器人202附近的个体190在视觉上显示信息。例如,显示装置240可以是平面屏幕监视器、计算机平板或智能电话装置。在实施例中,显示装置240可位于机器人202的头部上,或者可代替机器人202的头部。在实施例中,显示装置240是由机器人202携带的计算机平板或类似的显示装置。
44.机器人202可永久地或暂时地安置在(即,位于)电梯大厅310内,电梯大厅310位于电梯系统101附近的层站125上。机器人202可包括用于移动机器人202的推进系统210。机器人202可在整个电梯大厅310中移动、在整个层站125中远离电梯大厅310移动、和/或可经由电梯系统101和/或楼梯(未示出)移动到其他层站。推进系统210可以是模拟人腿部的腿部系统,如图2中所示。如图2中所示,推进系统210可包括用于移动机器人202的两个或更多腿部212。理解的是,虽然腿部系统用于示例性说明,但是本文中公开的实施例可以可应用于具有用于运输的其他推进系统的机器人,其他推进系统诸如例如轮系统、旋翼(rotorcraft)系统、气垫运载(hovercraft)系统、轮胎(tread)系统,或者可利用可以是本
领域技术人员已知的任何推进系统。还理解的是,具有人形外观的机器人202被用于示例性说明,本文中公开的实施例可应用于不具有人形外观的机器人。
45.机器人202包括用于收集传感器数据的传感器系统270。传感器系统270可包括但不限于惯性测量单元(imu)传感器276、相机272、麦克风274和位置传感器系统290。imu传感器276配置成检测机器人202的加速度。imu传感器276可以是诸如例如加速度计、陀螺仪之类的传感器、或者本领域技术人员已知的类似传感器。imu传感器276可检测加速度以及加速度的导数或积分,诸如例如速度、加加速度(jerk)、加加加速度(jounce)、加加加加速度(snap)等。
46.相机272可以配置成捕获机器人202周围的区域的图像。相机272可以是静止图像相机、视频相机、深度传感器、热感(thermal)相机和/或本领域技术人员已知的任何其他类型的成像装置。在一个实施例中,控制器250可以配置成使用图像识别来分析由相机272捕获的图像以标识个体190。在另一个实施例中,控制器250可以配置成将图像作为原始数据传送以便由建筑物系统管理器320处理。图像识别不仅可以标识个体190,而且还可以标识个体190是否表现为迷路和/或需要信息。面部识别和面部表情的分析可以用于确定个体190是否看起来迷路和/或需要信息。备选地,机器人202可以利用扬声器292来询问个体190“你迷路了吗”、“你需要方向吗”、“你要去哪里”或“你需要协助”。当确定个体190看起来迷路和/或需要方向时,则控制器250配置成以来自机器人202的扬声器292的可听通信的形式或者以经由机器人202的显示装置240的视觉通信的形式向个体提供信息。例如,信息可以是在显示装置240上显示为书面路线规划(turn
‑
by
‑
turn)方向或在显示装置240上显示为地图的到达电梯系统101的方向。相机272也可以用于捕获由个体190所执行的手势语言的图像,对该手势语言进行分析以理解个体190可能需要什么帮助。
47.麦克风274配置成检测声音。麦克风274配置成检测机器人202附近的可听声音,诸如例如,机器人202附近的个体190所说的语言。在一个实施例中,控制器250可以配置成使用语言识别软件来分析由麦克风274捕获的声音并且相应地响应。在另一个实施例中,控制器250可以配置成将声音作为原始数据传送以便由建筑物系统管理器320处理。例如,麦克风274可以检测询问问题的个体190,诸如例如“电梯在哪里”。控制器250和/或建筑物系统管理器320配置成分析此问题并确定适当的响应,诸如例如,提供到达最近的电梯系统101的方向。可以使用扬声器292可听地给出方向或者以地图或书面路线规划方向的形式在显示装置240上视觉上显示方向。机器人202还可以通过使个体190跟随机器人202来将个体190引导到其目的地。在另一个示例中,由个体190请求的问题或信息也可以采取关于在建筑物内或在本地区域中发生的本地事件的问题的形式。例如,个体190可以询问机器人202“明天会议在什么时间开始”,并且机器人202可以(可听地或视觉上)以明天安排的会议的开始时间来答复。在另一个示例中,个体190可以询问机器人202“明天音乐会什么时间在市中心发生”,并且机器人202可以(可听地或视觉上)以明天音乐会发生的开始时间来答复。在另一个示例中,个体190可以询问机器人202“我可以在哪里找到医生”,并且机器人202可以(可听地或视觉上)以医生的位置来答复。
48.在又一个示例中,个体190可以请求机器人202为个体190呼叫电梯轿厢103。个体190可以包括特定的层站作为要包括在电梯呼叫中的期望目的地,诸如例如,“我想去第七楼层”。机器人202可以物理移动到电梯呼叫装置89,并且按压电梯呼叫装置89上的正确按
钮以将乘客送到他们的期望目的地。在实施例中,机器人202可以在打开的电梯门104之间延伸臂220,将电梯轿厢103保持在层站125处,以便个体190搭乘电梯轿厢103。机器人202的延伸臂220与电梯系统101的门反向传感器(为了简单起见未示出)相互作用,以防止电梯门104关闭。备选地,机器人202也可通过按压电梯轿厢103内的“门打开”按钮来保持电梯门104为个体190打开。
49.机器人202还包括配置成检测机器人202的位置302的位置传感器系统290。机器人202的位置302还可以包括机器人202相对于其他物体的位置302,以便允许机器人202通过建筑物的走廊导航并且防止机器人202撞到物体或个体190。位置感测系统290可以使用一个感测装置或感测装置的组合,感测装置包括但不限于gps、无线信号三角测量、声呐(sonar)、雷达(radar)、激光雷达(lidar)、图像识别或本领域技术人员已知的任何其他位置检测或碰撞避免系统。位置传感器系统290可以利用gps以便检测机器人202的位置302。位置传感器系统290可以利用建筑物102内的无线信号的三角测量,以便确定机器人202在建筑物102内的位置。例如,位置传感器系统290可以利用来自整个建筑物102中已知位置中的wap 234的无线信号的接收信号强度(例如,rssi)来对机器人202在建筑物102内的位置进行三角测量。为了避免与物体碰撞,位置传感器系统290可以另外使用声呐、雷达、激光雷达或图像识别(卷积神经网络)。在初始部署或位置重置时,机器人202可以执行学习模式,使得机器人202可以变得熟悉环境。
50.机器人202包括通信模块280,其配置成允许机器人202的控制器250与建筑物系统管理器320通信。通信模块280能够通过计算机网络232向建筑物系统管理器320传送数据和从建筑物系统管理器320接收数据。计算机网络232可以是云计算网络。
51.通信模块280可以使用短程无线协议通过无线接入协议装置(wap)234与计算机网络232通信。短程无线协议可以包括但不限于蓝牙、wi
‑
fi、halow(801.11ah)、zwave、zigbee或无线m
‑
bus。备选地,通信模块280可以使用远程无线协议直接与计算机网络232通信。远程无线协议可以包括但不限于蜂窝、lte(nb
‑
iot、cat m1)、lora、卫星、ingenu或sigfox。
52.建筑物系统管理器320可以使用短程无线协议通过wap 234与计算机网络232通信。建筑物系统管理器320可以使用远程无线协议直接与计算机网络232通信。
53.建筑物系统管理器320是电子控制器,其包括处理器322和相关联的存储器324,所述相关联的存储器324包括计算机可执行指令,所述计算机可执行指令当由处理器322执行时,使处理器322执行各种操作。处理器322可以是但不限于广泛的一系列可能架构中的任何一个的单处理器或多处理器系统,包括同构或异构布置的现场可编程门阵列(fpga)、中央处理单元(cpu)、专用集成电路(asic)、数字信号处理器(dsp)或图形处理单元(gpu)硬件。存储器324可以是存储装置,诸如例如,随机存取存储器(ram)、只读存储器(rom)或其他电子、光、磁或任何其他计算机可读介质。
54.建筑物系统管理器320可以配置成获得、存储和向机器人202提供信息,该信息可以用于协助个体或回答个体190对机器人202拥有的问题。如上所述,该信息可以包括方向和地图。该信息还可以包括在机器人202所位于的建筑物102处或者在建筑物102周围的区域中发生的事件的时间表。该信息还可以包括建筑物102内和/或建筑物102周围的区域中的人或位置的目录信息。建筑物系统管理器320还可以执行建筑物102内的气候控制和/或建筑物102的建筑物访问控制。
55.现在参考图3,同时参考图1和2的组件。图3示出了根据本公开的实施例使用图2的机器人门卫系统200来协助个体190的方法400的流程图。在实施例中,方法400由图2的机器人门卫系统200执行。
56.在框404处,使用分配给运送系统的机器人202的传感器系统270来检测个体190。机器人202可以被分配给运送系统以协助可以使用运送系统的或者步行经过运送系统的个体190。在实施例中,运送系统可以是具有电梯轿厢103的电梯系统101。
57.在框406处,使用机器人202的传感器系统270确定个体190需要协助。在框408处,通过机器人202来协助个体190。在框406处,可以通过使用传感器系统270确定个体190需要信息来确定个体190需要协助,并且然后在框408中可以通过机器人202将信息提供给个体190。机器人202可以从建筑物系统管理器320接收信息。建筑物系统管理器320可以自动地将该信息推送或传送到机器人202。备选地,机器人202可以周期性地从建筑物系统管理器320请求信息,以预期可能从个体190期望的信息,或者当确定个体需要该信息时,机器人202可以实时地从建筑物系统管理器320请求该信息。该信息可以与方向、目录和时间表中的至少一个有关。
58.在框406中,可以通过从请求信息的个体190接收问题来确定个体190需要协助,并且然后在框408中,可以通过机器人202将该信息提供给个体190。可以使用传感器系统270的麦克风274从个体接收问题。备选地,当个体执行手势语言时,可使用传感器系统270的相机272从个体接收问题。机器人202可以使用机器人202的扬声器292可听地向个体190提供信息。机器人202可以使用机器人202的显示装置240在视觉上向个体190提供信息。机器人202可以使用机器人202的臂220在视觉上向个体190提供信息。
59.在框406中,可以通过确定个体190需要方向来确定个体190需要协助,并且然后在框408中,机器人202可以向个体190提供方向。可以使用机器人202的传感器系统270来确定个体190需要方向。例如,机器人202可以使用相机272来确定个体190视觉上看起来需要方向或迷路,机器人202使用麦克风274听到个体190说他们需要方向或迷路,或者机器人202可以利用相机272视觉上看到个体190使用手势语言指示他们需要方向或迷路。机器人202可以使用机器人202的扬声器292可听地向个体190提供方向。机器人202可以使用机器人202的显示装置240视觉上向个体190提供方向。机器人202可以使用机器人202的臂220视觉上向个体190提供方向。
60.在框406中,可以通过确定个体190想要使用运送系统来确定个体190需要协助,并且然后在框408中,机器人202可以为个体190控制运送系统的操作。在实施例中,运送系统可以是具有电梯轿厢103的电梯系统101。机器人202可以通过使用机器人202为个体190呼叫(即,传送电梯呼叫380)电梯轿厢103来控制电梯系统101的操作。电梯呼叫380可由机器人202手动按压电梯呼叫装置89来发出。机器人202可通过使用机器人202保持电梯系统101的门104打开以便个体190进入电梯轿厢103来控制电梯系统101的操作。机器人202可通过延伸机器人202的臂220以保持电梯系统101的门104打开以便个体190进入电梯轿厢103来控制电梯系统101的操作。在实施例中,机器人202通过臂220与电梯系统101的门反向传感器相互作用来保持门104打开。在另一个实施例中,机器人202通过臂220按压电梯系统101的门打开按钮来保持门104打开。在另一个实施例中,机器人202可以通过短程无线协议和远程无线协议中的至少一个直接与电梯系统101通信。在另一个实施例中,机器人202可以
通过短程无线协议和远程无线协议中的至少一个直接与电梯系统101的调度器350通信。在另一个实施例中,机器人202可以通过短程无线协议和远程无线协议中的至少一个直接与电梯系统101的控制器115通信。
61.虽然以上描述已经以特定顺序描述了图3的流程,但是应当理解,除非在所附权利要求书中另有特别要求,否则步骤的顺序可以改变。
62.如上所述,实施例可以采取处理器实现的过程和用于实践那些过程的装置(诸如处理器)的形式。实施例还可以采取包含指令的计算机程序代码(例如,计算机程序产品)的形式,所述指令体现在有形介质(例如,非暂时性计算机可读介质)中,有形介质诸如软盘、cd rom、硬盘驱动器或任何其他非暂时性计算机可读介质,其中,当计算机程序代码被加载到计算机中并由计算机执行时,计算机变为用于实践实施例的装置。例如,实施例还可以采取计算机程序代码的形式,而无论计算机程序代码是存储在存储介质中、加载到计算机中和/或由计算机执行;还是通过某种传输介质传送、加载到计算机中和/或由计算机执行;还是通过某种传输介质传送,诸如通过电线或电缆、通过光纤、或经由电磁辐射来传送,其中,当计算机程序代码加载到计算机中并由计算机执行时,计算机变成用于实践示例性实施例的装置。当在通用微处理器上实现时,计算机程序代码段配置微处理器以创建特定的逻辑电路。
63.术语“大约”旨在包括与基于提交本技术时可用的设备的特定量和/或制造公差的测量相关联的误差程度。
64.本文所使用的术语仅出于描述特定实施例的目的,并且不旨在限制本公开。如本文所使用的单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文另有明确指示。还将理解,术语“包括”和/或“包含”在本说明书中使用时,指定所述特征、整数、步骤、操作、元素和/或组件的存在,但不排除一个或多个其他特征、整数、步骤、操作、元素组件和/或其群组的存在或添加。
65.本领域技术人员将理解,本文示出和描述了各种示例实施例,每个示例实施例具有特定实施例中的某些特征,但本公开并不因此受限。相反,本公开可以被修改以并入此前未描述但与本公开的范围相称的任何数量的变型、变更、替代、组合、子组合或等同布置。另外,虽然已经描述了本公开的各种实施例,但是应当理解,本公开的方面可以仅包括所描述的实施例中的一些。因此,本公开不应被视为由前述描述限制,而是仅由所附权利要求的范围限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1