一种装有自动气锤的包装料斗的制作方法
[0001]
本实用新型涉及饲料生产加工技术领域,尤其涉及一种装有自动气锤的包装料斗。
背景技术:
[0002]
饲料,是所有人饲养的动物的食物的总称,比较狭义地一般饲料主要指的是农业或牧业饲养的动物的食物,饲料包括大豆、豆粕、玉米、鱼粉、氨基酸、杂粕、乳清粉、油脂、肉骨粉、谷物、饲料添加剂等十余个品种的饲料原料。
[0003]
在饲料加工企业中,产品产出时,一般用成品料仓做为缓冲,再进行包装作业,但为迎合市场需求同一条生产线需满足多个产品生产,然而不同产品原料会产生差异;在产品包装下料过程中,流动性好的产品往往打包顺畅,流动性较差的产品往往在成品缓冲仓结拱,导致下料、包装不顺畅,影响生产效率。
技术实现要素:
[0004]
本实用新型的目的在于:为了解决流动性较差的产品往往在成品缓冲仓结拱,导致下料、包装不顺畅,影响生产效率的问题,而提出的一种装有自动气锤的包装料斗。
[0005]
为了实现上述目的,本实用新型采用了如下技术方案:
[0006]
一种装有自动气锤的包装料斗,包括料斗本体和入料口,所述料斗本体的内部安装有料位传感器,所述料斗本体的外壁上安装有减震支座且减震支座上安装有控制器和电磁阀,所述料斗本体的底部倾斜状的侧壁上对称安装有两个气锤,所述料斗本体的内部设有清理搅拌机构,所述料斗本体的上表壁设有驱动清理搅拌机构转动的电机。
[0007]
作为上述技术方案的进一步描述:
[0008]
所述料位传感器的输出端与控制器的输入端电性连接,所述控制器的输出端与电磁阀的输入端电性连接,所述电磁阀的输出端与气锤的输入端电性连接。
[0009]
作为上述技术方案的进一步描述:
[0010]
所述清理搅拌机构包括人字形的转动杆,所述转动杆的两个底端均固定有倾斜状的清理壳体且清理壳体的底部设有刮板。
[0011]
作为上述技术方案的进一步描述:
[0012]
所述刮板延伸清理壳体的内腔并与清理壳体的内壁之间通过弹簧弹性连接。
[0013]
作为上述技术方案的进一步描述:
[0014]
所述转动杆的外表壁固定有搅拌杆。
[0015]
作为上述技术方案的进一步描述:
[0016]
所述转动杆的底部设有多个加强筋。
[0017]
综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
[0018]
1、本实用新型中,通过料位传感器、控制器和电磁阀的设置,可使得气锤自动启动对料斗本体进行敲击,达到下料顺畅的目的,另一个产品生产完成需排空成品料斗本体时,
气锤自动敲击,使料斗本体内壁残留清除干净,避免下一品种生产时,产生交叉污染,即减少人工操作,保证顺畅下料,工作效率得到提高,同时也降低了产品交叉污染的风险。
[0019]
2、本实用新型中,通过电机和清理搅拌机构的设置,可减少物料在由于自身重力的作用导致下端的物料被压实,使得下料更加顺利,提高了下料效率。
附图说明
[0020]
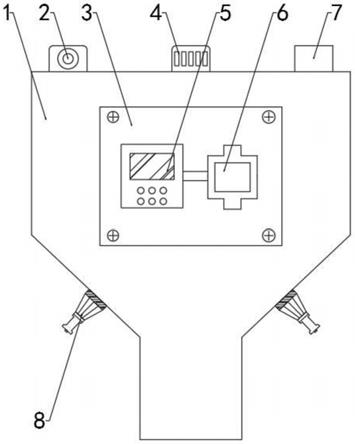
图1示出了根据本实用新型实施例提供的料斗本体外部结构示意图;
[0021]
图2示出了根据本实用新型实施例提供的料斗本体内部结构示意图;
[0022]
图3示出了根据本实用新型实施例提供的清理搅拌机构结构示意图;
[0023]
图例说明:
[0024]
1、料斗本体;2、料位传感器;3、减震支座;4、电机;5、控制器;6、电磁阀;7、入料口;8、气锤;9、清理搅拌机构;901、转动杆;902、搅拌杆;903、清理壳体;904、刮板;905、弹簧;906、加强筋。
具体实施方式
[0025]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
[0026]
请参阅图1-3,本实用新型提供一种技术方案:一种装有自动气锤的包装料斗,包括料斗本体1和入料口7,料斗本体1的内部安装有料位传感器2,料斗本体1的外壁上安装有减震支座3且减震支座 3上安装有控制器5和电磁阀6,减震支座3可对控制器5和电磁阀 6进行减震,减震支座3为现有技术在此不多赘述,料斗本体1的底部倾斜状的侧壁上对称安装有两个气锤8,料斗本体1的内部设有清理搅拌机构9,料斗本体1的上表壁设有驱动清理搅拌机构9转动的电机4,料位传感器2的输出端与控制器5的输入端电性连接,控制器5的输出端与电磁阀6的输入端电性连接,电磁阀6的输出端与气锤8的输入端电性连接,随着料位的下降,料位传感器2检测到料位较低时,料位传感器2将信号传递给控制器5,控制器5通过电磁阀 6使得气锤8自动启动对料斗本体1进行敲击,达到下料顺畅的目的。
[0027]
具体的,如图3所示,清理搅拌机构9包括人字形的转动杆901,转动杆901贯穿料斗本体1的内壁与电机4的输出轴传动连接,转动杆901的两个底端均固定有倾斜状的清理壳体903且清理壳体903的底部设有刮板904,清理壳体903与料斗本体1底部内壁的倾斜角度相同,刮板904延伸清理壳体903的内腔并与清理壳体903的内壁之间通过弹簧905弹性连接,弹簧905可给予刮板904一个弹力,刮板 904可在此弹力下与料斗本体1的内壁贴合。
[0028]
具体的,如图3所示,转动杆901的外表壁固定有搅拌杆902,转动杆901在转动的过程中可使得搅拌杆902对物料进行搅拌,使得物料较均匀的分布。
[0029]
具体的,如图3所示,转动杆901的底部设有多个加强筋906,加强筋906与转动杆901为一体成型结构,加强筋906提高了转动杆 901的抗折弯能力。
[0030]
工作原理:在饲料下料的过程中,打开电机4,电机4的输出轴带动转动杆901发生转动,转动杆901在转动的过程中,刮板904对料斗本体1的内壁进行刮动,可减少物料在料
斗本体1内壁处的堆积,随着料位的下降,料位传感器2检测到料位较低时,料位传感器2将信号传递给控制器5,控制器5通过电磁阀6使得气锤8自动启动对料斗本体1进行敲击,达到下料顺畅的目的。
[0031]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1