托盘式自动供料器的制作方法
[0001]
本实用新型涉及pcb板加工设备领域技术,尤其是指一种托盘式自动供料器,其主要是应用于异形插件机上。
背景技术:
[0002]
在pcb电路板的加工过程中,有一道重要的插件工序,即将电子元器件运送至指定位置,再由异形插件机将电子元器件插入到pcb 板上预设好的线脚插孔中,然后进行焊接固定。
[0003]
现有的将电子元器件运送至指定位置的方式一般为人工方式,自动化程度低,而且,由于电子元件数量多,加大了人工上料的工作量,降低上料效率。
[0004]
因此,本实用新型专利申请中,申请人精心研究了一种托盘式自动供料器来解决上述问题。
技术实现要素:
[0005]
有鉴于此,本实用新型针对现有技术存在之缺失,其主要目的是提供一种托盘式自动供料器,其使得整体为托盘的来料方式提供上料,实现异形插件机的自动取料,自动化程度较高,提高取料效率。
[0006]
为实现上述目的,本实用新型采用如下之技术方案:
[0007]
一种托盘式自动供料器,包括有一主控制器、一料仓、上下层叠设置于料仓内的若干托盘、一用于拉出托盘和抓取托盘上物料的三轴机构以及一用于暂存三轴机构所抓取之物料并对其整形的供料交换平台,其中:
[0008]
所述料仓具有前端开口,所述三轴机构设置于料仓的前端开口处且所述三轴机构可相对于料仓可上下、左右以及前后位移,所述供料交换平台位于料仓的前方,所述主控制器分别电连接于三轴机构和供料交换平台。
[0009]
作为一种优选方案,所述料仓包括有顶板和分别连接于顶板左、右端的左侧板、右侧板,所述左侧板和右侧板均沿上下方向延伸设置;
[0010]
所述左侧板和右侧板的内侧面均沿其延伸方向间距设置有相互平行的若干托盘存放机构,每一托盘存放机构包括有导引电机、转动连接于相应侧板的两导引滑轮和位于导引滑轮之间的一支撑板,两导引滑轮分别对称设置于支撑板的前、后侧,每一导引滑轮的上端面与支撑板的上端面位于同一平面上,所述支撑板沿前后方向延伸设置;
[0011]
所述左侧板和右侧板的外侧面针对每一前侧的导引滑轮设置有一第二导引齿轮,每一导引滑轮通过同步轴连接相应的第二导引齿轮,所述导引电机的输出轴套设有第一导引齿轮,所述第一导引齿轮可选择性啮合第二导引齿轮。
[0012]
作为一种优选方案,针对每一托盘设置有一用于锁固和解锁托盘的托盘保护机构,所述三轴机构上设置有沿前后方向延伸的前后滑轨,所述托盘保护机构包括有驱动气缸、适配于前后滑轨上沿前后滑轨可往复位移式设置的滑块以及设置于料仓外侧壁上的第
一活动臂;
[0013]
所述第一活动臂具有用于枢接料仓的第一枢接部和分别位于第一枢接部前、后侧的第一旋转臂、第二旋转臂;
[0014]
所述第一旋转臂枢接有锁止部,所述料仓上设置有贯通内部的若干让位孔,所述锁止部适配于让位孔内且锁止部可选择性伸入料仓内部或不伸入料仓内部,所述第二旋转臂的内侧壁与料仓的外侧壁上之间连接有复位弹性元件,所述驱动气缸的输出端朝向后连接有延伸部,所述延伸部的内侧壁一体往内延伸形成有第一止挡部,所述第二旋转臂的外侧壁一体往外延伸形成有第二止挡部,所述驱动气缸设置于滑块上以使得第一止挡部随滑块位移而选择性接触或不接触第二止挡部。
[0015]
作为一种优选方案,所述三轴机构包括有上下平移装置、前后平移装置、左右平移装置、用于拉出托盘的取盘装置以及用于抓取托盘上物料的抓料机械手;
[0016]
所述上下平移装置驱动连接取盘装置以使取盘装置沿上下方向位移,所述前后平移装置驱动连接抓料机械手以使取盘装置沿前后方向位移,所述左右平移装置驱动连接抓料机械手以使取盘装置沿左右方向位移。
[0017]
作为一种优选方案,所述料仓的前端开口处设置有沿上下方向延伸的第一滑轨,所述上下平移装置包括有适配于第一滑轨上沿第一滑轨可往复位移式设置的第一平移滑动座和用于驱动第一平移滑动座位移的第一平移驱动机构,所述取盘装置设置于第一平移滑动座上以随第一平移滑动座沿第一滑轨往复位移。
[0018]
作为一种优选方案,所述料仓于第一滑轨所在的侧面安装有沿上下方向间距式分布的若干第一光电开关,所述第一平移滑动座设置有第一挡光板,所述第一挡光板随第一平移滑动座位移而遮挡相应第一光电开关的受光口。
[0019]
作为一种优选方案,所述取盘装置包括有第一支架和第一驱动电机,所述第一支架设置于第一平移滑动座上,所述第一支架的左侧内壁和右侧内壁上均设置有一取盘传动机构,两取盘传动机构对称设置;
[0020]
每一取盘传动机构包括有第一传动轮、第二传动轮以及辅助传动轮,所述第一传动轮位于第二传动轮的前方,所述辅助传动轮位于第一传动轮和第二传动轮之间,所述第一驱动电机的输出轴连接有第一电机带轮,所述第一电机带轮、辅助传动轮、第一传动轮和第二传动轮四者之间套设有使四者同步转动的传送带,所述第一传动轮、第二传动轮和第一电机带轮均设置于传送带的内侧,所述辅助传动轮设置于传送带的外侧。
[0021]
作为一种优选方案,所述取盘装置上设置有沿前后方向延伸的第二滑轨;
[0022]
所述前后平移装置包括有适配于第二滑轨上沿第二滑轨可往复位移式设置的第二平移滑动座和用于驱动第二平移滑动座位移的第二平移驱动机构,所述抓料机械手设置于第二平移滑动座上以随第二平移滑动座沿第二滑轨往复位移。
[0023]
作为一种优选方案,所述前后平移装置还驱动连接左右平移装置以使左右平移装置沿前后方向位移;抓料机械手通过左右平移装置设置于第二平移滑动座上;
[0024]
所述左右平移装置包括有第二支架、设置于第二支架上的第二驱动电机和转动连接于第二支架的第三传动轮,所述第二支架设置于前后平移装置的第二平移滑动座上,所述第二驱动电机的输出轴连接有第二电机带轮,所述抓料机械手位于位于第二电机带轮和第三传动轮之间,所述第二电机带轮和第三传动轮两者之间套设有使两者同步转动的第二
传动带,所述抓料机械手设置于第二传动带上以随第二传动带沿左右向往复位移。
[0025]
作为一种优选方案,所述供料交换平台包括有用于暂存三轴机构所抓取之若干物料的至少两轨道以及设置于每一轨道前端的一整形机构;
[0026]
每一轨道沿前后方向延伸布置,每一轨道具有暂存腔,所述暂存腔具有后端进口和前端出口,所述前后平移装置驱动抓料机械手靠近或远离暂存腔的后端进口;
[0027]
所述整形机构包括有整形驱动机构和整形治具,所述整形驱动机构驱动连接整形治具以驱动整形治具靠近或远离相应轨道的前端出口,所述整形治具的上端往下凹设有后端开口的整形槽,所述整形槽的后端开口正对暂存腔的前端出口。
[0028]
本实用新型与现有技术相比具有明显的优点和有益效果,具体而言:
[0029]
其主要是料仓和三轴机构配合,使得整体为托盘的来料方式提供上料,实现异形插件机的自动取料,自动化程度较高,提高取料效率;
[0030]
其次是,通过托盘保护机构,能够起到对托盘于托盘存放机构上的保护作用,避免托盘在不需要被取出时从托盘存放机构上脱离,保证托盘于托盘存放机构上的稳定性;
[0031]
再者是,通过第一光电开关和第二光电开关的设置,有利于判断抓料机械手在相应方向平移的位置;
[0032]
以及,整体结构设计巧妙合理,各部件之间组装方便和牢固,确保了整体在工作过程中的稳定性和可靠性。
[0033]
为更清楚地阐述本实用新型的结构特征和功效,下面结合附图与具体实施例来对本实用新型进行详细说明。
附图说明
[0034]
图1是本实用新型之较佳实施例的应用于异形插件机上的结构示意图;
[0035]
图2是图1的侧视图;
[0036]
图3是本实用新型之较佳实施例的第一立体组装结构示意图;
[0037]
图4是本实用新型之较佳实施例的第二立体组装结构示意图(主要显示料仓、托盘存放机构、第一平移驱动机构和部分托盘保护机构);
[0038]
图5是图4所示结构的另一角度示意图;
[0039]
图6是本实用新型之较佳实施例的局部放大结构示意图(主要显示第一光电开关和第一挡光板);
[0040]
图7是本实用新型之较佳实施例的三轴机构局部立体组装结构示意图;
[0041]
图8是本实用新型之较佳实施例的取盘装置立体组装结构示意图(显示第二平移滑动座和第二滑轨);
[0042]
图9是本实用新型之较佳实施例的前后平移装置立体组装结构示意图(显示第二光电开关和第二挡光板);
[0043]
图10是本实用新型之较佳实施例的左右平移装置立体组装结构示意图(显示抓料机械手);
[0044]
图11是本实用新型之较佳实施例的托盘保护机构局部结构示意图;
[0045]
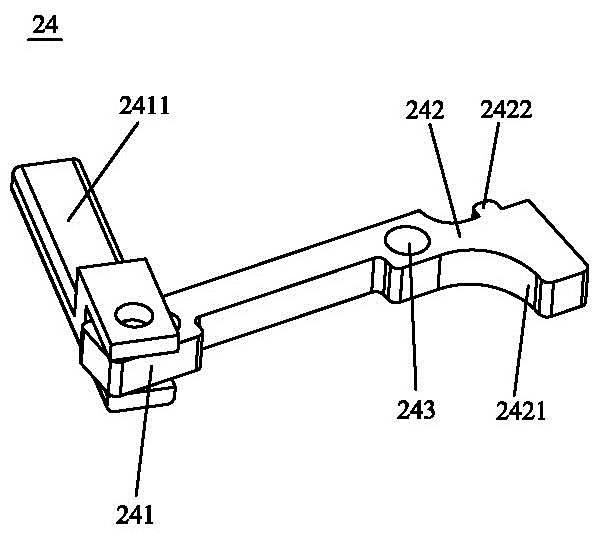
图12是本实用新型之较佳实施例的第一活动臂局部结构示意图(未显示复位弹性元件);
[0046]
图13是本实用新型之较佳实施例的供料交换平台组装结构示意图(显示多轨道);
[0047]
图14是本实用新型之较佳实施例的供料交换平台组装分解结构示意图(显示一轨道);
[0048]
图15是本实用新型之较佳实施例的轨道立体组装结构示意图;
[0049]
图16是本实用新型之较佳实施例的轨道俯视图;
[0050]
图17是本实用新型之较佳实施例的轨道分解结构示意图;
[0051]
图18是本实用新型之较佳实施例的整形治具俯视图;
[0052]
图19是本实用新型之较佳实施例的宽度调节机构连接于轨道上的放大结构示意图;
[0053]
图20是本实用新型之较佳实施例的大致控制原理框图。
[0054]
附图标识说明:
[0055]
10、底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11、壳体
[0056]
111、主控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112、显示屏
[0057]
113、急停按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
114、电源开关按钮
[0058]
115、换料按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
116、暂停按钮
[0059]
117、启动按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
118、复位按钮
[0060]
20、料仓
[0061]
201、顶板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202、左侧板
[0062]
203、右侧板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
204、让位孔
[0063]
21、托盘
[0064]
221、导引电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2211、第一导引齿轮
[0065]
222、导引滑轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
223、支撑板
[0066]
2231、横向部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2232、竖向部
[0067]
224、加强杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
225、第二导引齿轮
[0068]
226、同步轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23、托盘保护机构
[0069]
231、驱动气缸
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
232、滑块
[0070]
24、第一活动臂
[0071]
241、第一旋转臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2411、锁止部
[0072]
242、第二旋转臂
[0073]
2421、第二止挡部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2422、凸部
[0074]
243、第一枢接部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
244、第一光电开关
[0075]
245、延伸部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2451、第一止挡部
[0076]
25、第一滑轨
[0077]
30、三轴机构
[0078]
301、前后滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302、抓料机械手
[0079]
310、上下平移装置
[0080]
311、第一平移滑动座
ꢀꢀꢀꢀꢀꢀ
312、第一挡光板
[0081]
313、转动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
314、第四传动轮
[0082]
315、第三传动带
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
316、转动电机
[0083]
317、第九传动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
318、同轴转动轮
[0084]
319、第一传动带
[0085]
320、取盘装置
[0086]
321、第一驱动电机
ꢀꢀꢀꢀꢀꢀꢀꢀ
3211、第一电机带轮
[0087]
322、后支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
323、左支架
[0088]
324、右支架
[0089]
3241、第二光电开关
ꢀꢀꢀꢀꢀꢀꢀ
3242、限位块
[0090]
325、第一传动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
326、第二传动轮
[0091]
327、辅助传动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
328、第二滑轨
[0092]
329、传送带
[0093]
330、前后平移装置
[0094]
331、第二平移滑动座
ꢀꢀꢀꢀꢀꢀ
332、第五传动轮
[0095]
333、第六传动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
334、第七传动轮
[0096]
335、第八传动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
336、第三驱动电机
[0097]
3361、第三电机带轮
ꢀꢀꢀꢀꢀꢀꢀ
337、第四传动带
[0098]
340、左右平移装置
[0099]
341、第二支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3411、第二挡光板
[0100]
342、第二驱动电机
ꢀꢀꢀꢀꢀꢀꢀꢀ
3421、第二电机带轮
[0101]
343、第三传动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
344、第二传动带
[0102]
40、供料交换平台
[0103]
401、前端出口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
402、后端进口
[0104]
41、轨道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
411、轨道后板
[0105]
412、盖板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4121、条形孔
[0106]
413、第一轨道侧板
ꢀꢀꢀꢀꢀꢀꢀꢀ
414、底板
[0107]
415、第二轨道侧板
[0108]
42、整形机构
[0109]
43、整形驱动机构
[0110]
431、整形滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
432、整形滑动座
[0111]
433、整形气缸
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4331、凹槽
[0112]
44、整形治具
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
441、整形槽
[0113]
4411、第一引脚核对槽
ꢀꢀꢀꢀꢀ
4412、第二引脚核对槽
[0114]
4413、导向斜边
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4414、斜向整形面
[0115]
4415、水平整形面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
442、防呆块
[0116]
45、基板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
46、整形控制器
[0117]
47、第二活动臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
471、第二枢接部
[0118]
472、第三旋转臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
473、第四旋转臂
[0119]
48、调节气缸
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
49、振动装置
[0120]
50、异形插件机。
具体实施方式
[0121]
请参照图1和图2所示,其显示出了本实用新型之较佳实施例位于异形插件机50的前端。请参照图3至图20所示,其显示出了本实用新型之较佳实施例的具体结构,一种托盘式自动供料器,包括有一主控制器111、一底座10、一连接于底座10上端的料仓20、一壳体11、上下层叠设置于料仓20内的若干托盘21、一用于拉出托盘21和抓取托盘21上物料的三轴机构30以及一用于暂存三轴机构30所抓取之物料并对其整形的供料交换平台40,供料交换平台40的前半段位于异形插件机50内,其中:
[0122]
所述壳体11罩设于料仓20的上端、左端、右端和后端面,所述料仓20具有前端开口和后端开口,所述三轴机构30设置于料仓20的前端开口处且所述三轴机构30可相对于料仓20可上下、左右以及前后位移,所述供料交换平台40位于料仓20的前方且供料交换平台40悬空于底座10的上方,优选地,所述供料交换平台40的下端通过支撑杆401连接底座10。
[0123]
所述主控制器111位于壳体11内,所述壳体11的左侧上设置有显示屏112、急停按钮113、电源开关按钮114、换料按钮115、暂停按钮116、启动按钮117以及复位按钮118,所述主控制器111分别电连接于三轴机构30、供料交换平台40、显示屏112、急停按钮113、电源开关按钮114、换料按钮115、暂停按钮116、启动按钮117以及复位按钮118。
[0124]
如图3至图5所示,在本实施例中,所述料仓20包括有顶板201和分别连接于顶板201左、右端的左侧板202、右侧板203,所述左侧板202和右侧板203均沿上下方向延伸设置;
[0125]
所述左侧板202和右侧板203的内侧面均沿其延伸方向间距设置有相互平行的若干托盘存放机构,每一托盘存放机构包括有导引电机221、转动连接于相应侧板的两导引滑轮222和位于导引滑轮222之间的一支撑板223,所述主控制器111电连接导引电机221。每一托盘21设置于相应的支撑板223上。两导引滑轮222分别对称设置于支撑板223的前、后侧,每一导引滑轮222的上端面与支撑板223的上端面位于同一平面上,所述支撑板223沿前后方向延伸设置,两支撑板223之间连接有两加强杆224,所述支撑板223的截面为l型,其具有左右方向水平延伸的横向部2231和一体连接于横向部2231外侧的竖向部2232,所述横向部2231用于承载托盘21;所述加强杆224沿左右方向延伸设置,所述加强杆224的左、右端分别连接相应的竖向部2232。
[0126]
所述左侧板202和右侧板203的外侧面针对每一前侧的导引滑轮222设置有一第二导引齿轮225,每一导引滑轮222通过同步轴连接相应的第二导引齿轮225,所述导引电机221的输出轴套设有第一导引齿轮2211,所述第一导引齿轮2211随下述驱动气缸231的驱动下可选择性啮合第二导引齿轮225。
[0127]
在本实施例中,如图4、图6和图11所示,针对每一托盘21设置有一用于锁固和解锁托盘21的托盘保护机构23,所述三轴机构30上设置有沿前后方向延伸的前后滑轨301,优选地,所述前后滑轨301设置于下述左支架323上。所述托盘保护机构23包括有驱动气缸231、适配于前后滑轨301上沿前后滑轨301可往复位移式设置的滑块232以及设置于料仓20外侧壁上的第一活动臂24;所述主控制器111电连接驱动气缸231。如图12所示,所述第一活动臂24具有用于枢接料仓20的第一枢接部243和分别位于第一枢接部243前、后侧的第一旋转臂241、第二旋转臂242;
[0128]
所述第一旋转臂241枢接有锁止部2411,所述料仓20上设置有贯通内部的若干让位孔204,每一让位孔204位于每一导引滑轮222的上方,所述锁止部2411适配于让位孔204
内且锁止部2411可选择性伸入料仓20内部或不伸入料仓20内部,所述第二旋转臂242的内侧壁与料仓20的外侧壁上之间连接有复位弹性元件(图中未显示),优选地,所述第二旋转臂242凸设有便于复位弹性元件套设的凸部2422,所述复位弹性元件为弹簧。所述驱动气缸231的输出端朝向后连接有延伸部245,优选地,导引电机221也设置于驱动气缸231的输出端上;所述延伸部245的内侧壁一体往内延伸形成有第一止挡部2451,所述第二旋转臂242的外侧壁一体往外延伸形成有第二止挡部2421,所述驱动气缸设231置于滑块232上以使得第一止挡部2451随滑块位移而选择性接触或不接触第二止挡部2421。
[0129]
当滑块232沿前后滑轨301往后位移时,第一止挡部2451与第二止挡部2421接触后,复位弹性元件受压缩变形,第一旋转臂241向外张开,锁止部2411不伸入料仓20内以解锁托盘21便于托盘21离开托盘存放机构;当滑块232沿前后滑轨301往前位移时,第一止挡部2451与第二止挡部2421不接触后,在复位弹性元件的复位作用力下,第二旋转臂242向外复位,第一旋转臂241向内复位以使锁止部2411伸入料仓20内部形成对托盘21的锁固防止托盘21在非工作状态下脱离托盘存放机构。
[0130]
如图7至图10所示,所述三轴机构30包括有上下平移装置310、前后平移装置330、左右平移装置340、用于拉出托盘21的取盘装置320以及用于抓取托盘21上物料的抓料机械手302,所述主控制器111电连接抓料机械手302。优选地,抓料机械手302可以为吸盘机械手或夹料机械手,在此不作限定。另外,所述抓料机械手302也可以相对左右平移装置作升降移动。
[0131]
所述上下平移装置310驱动连接取盘装置320以使取盘装置320沿上下方向位移,所述前后平移装置330驱动连接抓料机械手302以使取盘装置320沿前后方向位移,所述左右平移装置340驱动连接抓料机械手302以使取盘装置320沿左右方向位移。
[0132]
如图4至图6所示,在本实施例中,所述料仓20的前端开口处设置有沿上下方向延伸的第一滑轨25,所述上下平移装置310包括有适配于第一滑轨25上沿第一滑轨25可往复位移式设置的第一平移滑动座311和用于驱动第一平移滑动座311位移的第一平移驱动机构,所述取盘装置320设置于第一平移滑动座311上以随第一平移滑动座311沿第一滑轨25往复位移。
[0133]
所述料仓20于第一滑轨25所在的侧面安装有沿上下方向间距式分布的若干第一光电开关244,所述主控制器111电连接第一光电开关244。所述第一平移滑动座311设置有第一挡光板312,所述第一挡光板312随第一平移滑动座311位移而遮挡相应第一光电开关244的受光口。
[0134]
如图4和图5所示,所述第一平移驱动机构包括有一转动电机316和转动连接于料仓20的两第四传动轮314、两第九传动轮317,所述主控制器111电连接转动电机316。所述左侧板202和右侧板203上分别设置一第四传动轮314和一第九传动轮317,两第四传动轮314之间通过一旋转轴一体连接。所述转动电机316设置于底座10上,所述转动电机316的输出轴连接有转动轮313,所述第九传动轮317设置于第四传动轮314的正上方,所述第四传动轮314同轴转动连接有同轴转动轮318,所述第九传动轮317和第四传动轮314两者之间套设有使两者同步转动的第三传动带315,所述同轴转动轮318和转动轮313两者之间套设有使两者同步转动的第一传动带319,所述第三传动带315驱动连接第一平移滑动座311以驱动第一平移滑动座311上下向位移。
[0135]
如图8所示,在本实施例中,所述取盘装置320包括有第一支架和第一驱动电机321,所述主控制器111电连接第一驱动电机321。所述第一支架设置于第一平移滑动座311上,所述第一支架的左侧内壁和右侧内壁上均设置有一取盘传动机构,两取盘传动机构对称设置;优选地,所述第一支架包括后支架322以及对称设置于后支架322左、右侧的左支架323、右支架324,所述左支架323和右支架324分别连接后支架322,所述左支架323的右侧壁和右支架324的左侧壁上设置前述取盘传动机构。
[0136]
每一取盘传动机构包括有第一传动轮325、第二传动轮326以及辅助传动轮327,所述第一传动轮325位于第二传动轮326的前方,所述第一传动轮325的前方设置有限位块3242用于限位于传送带329上的托盘。所述辅助传动轮327位于第一传动轮325和第二传动轮326之间,所述第一驱动电机321的输出轴连接有第一电机带轮3211,所述第一电机带轮3211、辅助传动轮327、第一传动轮325和第二传动轮326四者之间套设有使四者同步转动的传送带329,所述第一传动轮325、第二传动轮326和第一电机带轮3211均设置于传送带329的内侧,所述辅助传动轮327设置于传送带329的外侧。
[0137]
在本实施例中,所述取盘装置320上设置有沿前后方向延伸的第二滑轨328,优选地,所述左支架323和右支架324的上端面均设置有第二滑轨328;如图9所示,所述前后平移装置330包括有适配于第二滑轨328上沿第二滑轨328可往复位移式设置的第二平移滑动座331和用于驱动第二平移滑动座331位移的第二平移驱动机构,所述抓料机械手302设置于第二平移滑动座331上以随第二平移滑动座331沿第二滑轨328往复位移。
[0138]
所述第二平移驱动机构包括有第五传动轮332、第六传动轮333、第七传动轮334、第八传动轮335以及第三驱动电机336,所述主控制器111电连接第三驱动电机336。所述第五传动轮332、第六传动轮333、第七传动轮334以及第八传动轮335均设置于右支架324的右侧壁上,所述第三驱动电机336设置于右支架324的左侧壁上,所述第三驱动电机336的输出轴穿过右支架324水平向右连接有第三电机带轮3361;
[0139]
所述第五传动轮332和第六传动轮333均位于第七传动轮334和第八传动轮335两者的上方,所述第三电机带轮3361位于第七传动轮334和第八传动轮335两者的下方;所述第五传动轮332、第六传动轮333、第七传动轮334、第八传动轮335以及第三电机带轮3361五者之间套设有使五者同步转动的第四传动带337,所述第五传动轮332、第六传动轮333和第三电机带轮3361均设置于第四传动带337的内侧,所述第七传动轮334和第八传动轮335设置于第四传动带337的外侧。由于下述第二支架341连接第四传动带337且第二支架341设置于第二平移滑动座331上,因此实现所述第四传动带337驱动连接第二平移滑动座331以驱动第二平移滑动座331前后向位移。
[0140]
优选地,所述右支架324的右侧壁上安装有第二光电开关3241,下述第二支架341设置有第二挡光板3411,所述第二挡光板3411随第二平移滑动座331位移而遮挡第二光电开关3241的受光口。所述主控制器111电连接第二光电开关3241。
[0141]
所述前后平移装置330还驱动连接左右平移装置340以使左右平移装置340沿前后方向位移;抓料机械手302通过左右平移装置340设置于第二平移滑动座331上;
[0142]
所述左右平移装置340包括有第二支架341、设置于第二支架341上的第二驱动电机342和转动连接于第二支架341的第三传动轮343,所述主控制器111电连接第二驱动电机342。所述第二支架341设置于前后平移装置330的第二平移滑动座331上,所述第二驱动电
机342的输出轴连接有第二电机带轮3421,所述抓料机械手302位于位于第二电机带轮3421和第三传动轮343之间,所述第二电机带轮3421和第三传动轮343两者之间套设有使两者同步转动的第二传动带344,所述抓料机械手302设置于第二传动带344上以随第二传动带344沿左右向往复位移。
[0143]
如图13至图19所示,所述供料交换平台40包括有用于暂存三轴机构30所抓取之若干物料的至少两轨道41以及设置于每一轨道41前端的一整形机构42;
[0144]
每一轨道41沿前后方向延伸布置,每一轨道41具有暂存腔,所述暂存腔具有后端进口402和前端出口401,所述前后平移装置330驱动抓料机械手302靠近或远离暂存腔的后端进口402;
[0145]
所述整形机构42包括有整形驱动机构43和整形治具44,所述整形驱动机构43驱动连接整形治具44以驱动整形治具44靠近或远离相应轨道41的前端出口401,所述整形治具44的上端往下凹设有后端开口的整形槽441,所述整形槽441的后端开口正对暂存腔的前端出口401。
[0146]
所述整形驱动机构43包括有前后延伸布置的整形滑轨431、适配于整形滑轨431上沿整形滑轨431可往复位移式设置的整形滑动座432和用于驱动整形滑动座432位移的整形气缸433,所述整形治具44设置于整形滑动座432上以随整形滑动座432沿整形滑轨431往复位移。
[0147]
在本实施例中,所述供料交换平台40还包括有基板45,每一轨道41和整形气缸433均设置于底板414上,所述底板414上还设有整形控制器46,所述整形控制器46电连接于主控制器111、整形气缸433和下述调节气缸48,所述整形控制器46的型号为sdvc31。
[0148]
所述整形滑轨431设置于整形气缸433上,使得供料交换平台40结构紧凑性较好。优选地,所述整形气缸433的上端面往下凹设有前后开口的凹槽4331,所述整形滑轨431设置于凹槽4331的内底壁上,所述整形滑动座432适配于凹槽4331内。
[0149]
所述轨道41包括有轨道后板411以及首尾相接的盖板412、第一轨道侧板413、底板414和第二轨道侧板415,所述第一轨道侧板413、底板414、盖板412和第二轨道侧板415均沿前后方向延伸,所述轨道后板411连接底板414的后端,优选地,所述盖板412上开设有沿前后方向间距式分布的若干条形孔4121,每一条形孔4121贯通暂存腔。在本实施例中,还包括吹气机(图中未显示),所述轨道后板411上开设有连通暂存腔的吹气孔,所述吹气机的输出端位于吹气孔处。所述底板414的下端设置有电连接于整形控制器46的振动装置49,通过振动装置49配合吹气机和吹气孔,使得暂存腔内物料自后往前位移。
[0150]
所述盖板412、第一轨道侧板413、底板414、第二轨道侧板415以及轨道后板411之间围构形成暂存腔,所述盖板412的长度均小于底板414的长度以形成后端进口402,所述后端进口402所容纳的空间为至少一个半物料的体积。
[0151]
所述第一轨道侧板413和底板414的一端一体连接形成l形结构,所述第二轨道侧板415通过宽度调节机构可拆装式连接底板414的另一端。优选地,所述宽度调节机构包括有调节气缸48和第二活动臂47,所述调节气缸48设置于底板414上,所述第二活动臂47具有用于枢接第二轨道侧板415的第二枢接部471和分别位于第二枢接部471上、下侧的第三旋转臂472、第四旋转臂473;所述调节气缸48的输出端朝向第二轨道侧板415设置且枢接于第四旋转臂473,所述第三旋转臂472与第二轨道侧板415的外侧壁枢接;
[0152]
所述调节气缸48往外伸出,第四旋转臂473向外张开,第三旋转臂472驱动第二轨道侧板415向内平移以使暂存腔的宽度减小;所述调节气缸48往内缩回,第四旋转臂473向内复位,第三旋转臂472驱动第二轨道侧板415向外平移以使暂存腔的宽度增大。
[0153]
所述整形槽441的右侧内壁上形成有自后往前向内倾斜的导向斜边4413;所述整形槽441的左侧内壁上凹设有第一引脚核对槽4411和第二引脚核对槽4412;
[0154]
第一引脚核对槽4411和第二引脚核对槽4412之间形成有用于对物料边缘整形的侧整形部,所述侧整形部包括自后往前向内倾斜的斜向整形面4414和一体连接于斜向整形面4414前端的水平整形面4415,所述水平整形面4415自前往后水平延伸设置。所述整形治具44上设有防呆块442,所述防呆块442设置于整形槽441内且位于整形槽441的后端开口的相对侧。
[0155]
接下来大致说明下工作过程:主控制器111通过上下平移装置310将取盘装置320移动至待取出托盘处,主控制器111通过托盘保护机构23解除对待取出托盘的固定,主控制器111通过取盘装置320将待取出托盘移动至传送带上,主控制器111通过左右平移装置340控制抓料机械手302对托盘上的物料进行抓取;然后,主控制器111通过上下平移装置310和前后平移装置330将抓料机械手302运送至供料交换平台40的后端进口402处并放入暂存腔内,暂存腔内的物料在被振动和吹气的作用下移动至整形治具44的整形槽441内以整形后便于异形插件机后续工作。
[0156]
本实用新型的设计重点在于,其主要是料仓和三轴机构配合,使得整体为托盘的来料方式提供上料,实现异形插件机的自动取料,自动化程度较高,提高取料效率;
[0157]
其次是,通过托盘保护机构,能够起到对托盘于托盘存放机构上的保护作用,避免托盘在不需要被取出时从托盘存放机构上脱离,保证托盘于托盘存放机构上的稳定性;
[0158]
再者是,通过第一光电开关和第二光电开关的设置,有利于判断抓料机械手在相应方向平移的位置;
[0159]
以及,整体结构设计巧妙合理,各部件之间组装方便和牢固,确保了整体在工作过程中的稳定性和可靠性。
[0160]
以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型的技术范围作任何限制,故凡是依据本实用新型的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1