一种基于机器视觉系统的搬运装置
1.本实用新型属于垃圾清理领域,特别涉及一种基于机器视觉系统的搬运装置。
背景技术:
2.自2015年以来国家陆续发布的“互联网+”行动计划以及《中国制造2025》发展战略以来,中国制造业开始迎来了新的机遇,信息化与工业化的深度融合,全面推进制造业由生产型制造向智能、绿色和服务型制造转变已成为新一轮科技革命和产业变革的关键方向。
3.机器视觉系统的特点是提高生产的柔性和自动化程度。目前垃圾处理实际情况:垃圾清运车有专门的人员将抓臂放置在需要清理的垃圾桶上,再通过机械自动化倾倒到垃圾清运车,最后将垃圾桶放回原位,也就是说目前采用半自动化处理垃圾,需要至少一个辅助工作人员,人员配置高,且自动化程度不足。
技术实现要素:
4.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种基于机器视觉系统的搬运装置,能够自动化的对垃圾桶进行清理,减少人员操作。
5.技术方案:为实现上述目的,本实用新型的技术方案如下:
6.一种基于机器视觉系统的搬运装置,包括机器视觉相机、第一位移机构、第二位移机构、夹持机构和翻转机构,所述机器视觉相机设置在垃圾车的顶部上,且朝向垃圾车的后方图像采集,所述第一位移机构沿车体的前后方向设置在垃圾车的尾部,且所述第一位移机构的移动端上设置有第二位移机构,所述第二位移机构的位移方向与第一位移机构的位移方向相互垂直设置,所述第二位移机构的移动端上设置有翻转机构,所述翻转机构的被驱动端上设置有夹持机构,所述夹持机构通过翻转机构在车体的前后方向上翻转设置;所述夹持机构通过第一位移机构、第二位移机构调整相对垃圾桶的位置并夹持垃圾桶。
7.进一步的,所述夹持机构包括丝杆机构、活动夹杆和固定夹杆,所述丝杆机构设置在第二位移机构的移动端上,且所述丝杆机构中的滑动座的移动方向与第二位移机构同向设置,所述固定夹杆固定设置在丝杆机构的固定座上,所述活动夹杆设置在所述滑动座上,所述固定夹杆、活动夹杆均同向设置在背离于垃圾车的一侧。
8.进一步的,所述翻转机构包括伸缩机构、连杆、固定支撑块和支架杆,所述支架杆设置在第二位移机构的移动端上且向下延伸设置,所述伸缩机构的一端铰接设置在所述支架杆上,所述夹持机构支撑设置在第二位移机构的上方,所述固定支撑块设置在第二位移机构的移动端上且朝向车体的一侧上,所述连杆的杆体铰接设置在所述固定支撑块上,且铰接轴线方向与第二位移机构的位移端移动方向同向,所述连杆的一端连接于夹持机构上,且所述连杆的另一端与伸缩机构的伸缩端铰接设置;所述夹持机构通过伸缩机构的伸缩动作在竖向平面内翻转。
9.进一步的,所述伸缩机构为电动推杆。
10.进一步的,所述第一位移机构设置在车体的宽度方向上的一侧,所述第二位移机
构靠近于第一位移机构的一端设置在第一位移机构的移动端上。
11.进一步的,所述第一位移机构、第二位移机构均为直线位移模组。
12.有益效果:本实用新型基于机器视觉系统的图像采集和定位,夹持机构通过第一位移机构、第二位移机构调整相对垃圾桶的位置并夹持垃圾桶,通过机械搬运装置能够替代人工操作,能够减少人员配置,且提升自动化程度。
附图说明
13.附图1为本实用新型的整体结构的主视图;
14.附图2为本实用新型的整体结构的立体示意图;
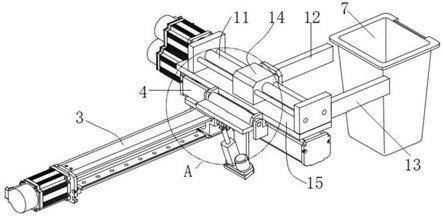
15.附图3为本实用新型的搬运装置的立体示意图;
16.附图4为本实用新型的局部a的结构放大示意图。
具体实施方式
17.下面结合附图对本实用新型作更进一步的说明。
18.如附图1至附图3所示,一种基于机器视觉系统的搬运装置,包括机器视觉系统中的机器视觉相机2、第一位移机构3、第二位移机构4、夹持机构5和翻转机构6,所述机器视觉相机2设置在垃圾车1的顶部上,且朝向垃圾车1的后方进行图像采集,用以定位垃圾桶7的位置,所述第一位移机构3、第二位移机构4均为直线位移模组。所述第一位移机构3沿车体的前后方向设置在垃圾车1的尾部,且所述第一位移机构3的移动端上设置有第二位移机构4,所述第二位移机构4的位移方向与第一位移机构3的位移方向相互垂直设置,所述第二位移机构4的移动方向沿车体的宽度方向,所述第二位移机构4的移动端上设置有翻转机构6,所述翻转机构6的被驱动端上设置有夹持机构5,所述夹持机构5通过翻转机构6在车体的前后方向上翻转设置;所述夹持机构5通过第一位移机构3、第二位移机构4调整相对垃圾桶7的位置并夹持垃圾桶7,夹持后在通过翻转机构6的翻转动作将垃圾桶7向垃圾车内倾倒,倾倒完成后翻转机构复位,夹持机构5复位,完成垃圾的一次清理过程。基于机器视觉系统的图像采集和定位,夹持机构通过第一位移机构、第二位移机构调整相对垃圾桶的位置并夹持垃圾桶,通过机械搬运装置能够替代人工操作,能够减少人员配置,且提升自动化程度。
19.所述夹持机构5包括丝杆机构11、活动夹杆12和固定夹杆13,所述丝杆机构11设置在第二位移机构4的移动端上,且所述丝杆机构11中的滑动座14的移动方向与第二位移机构4同向设置,所述固定夹杆13固定设置在丝杆机构11的固定座15上,所述活动夹杆12设置在所述滑动座14上,所述固定夹杆13、活动夹杆14均同向设置在背离于垃圾车1的一侧。通过丝杆机构11作为夹持的驱动组件,能够有较强的夹持作用,且其机构简单,易维护。
20.如附图3和附图4所示,所述翻转机构6包括伸缩机构8、连杆9、固定支撑块10和支架杆16,所述伸缩机构8为电动推杆,所述支架杆16设置在第二位移机构4的移动端上且向下延伸设置,所述支架杆16为杆体状结构,用于支撑伸缩机构8,所述伸缩机构8的一端铰接设置在所述支架杆18上。所述夹持机构5支撑设置在第二位移机构4的移动端的上方,所述固定支撑块10设置在第二位移机构4的移动端上且朝向车体的一侧上,所述连杆9的杆体铰接设置在所述固定支撑块10上,且铰接轴线方向与第二位移机构4的位移端移动方向同向,所述连杆9的一端连接于夹持机构5上,且所述连杆9的另一端与伸缩机构8的伸缩端铰接设
置;所述夹持机构5通过伸缩机构8的伸缩动作在竖向平面内翻转,其动作迅速,结构简单,易于维护。
21.所述第一位移机构3设置在车体的宽度方向上的一侧,所述第二位移机构4靠近于第一位移机构3的一端设置在第一位移机构3的移动端上,能够避免第一位移机构4对车体后方区域的干涉,保证垃圾桶能够有较大的活动空间。
22.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1