一种自动取料机的制作方法
1.本实用新型涉及取料装置技术领域,尤其涉及一种自动取料机。
背景技术:
2.陶瓷是陶器与瓷器的统称,传统陶瓷又称普通陶瓷,是以粘土等天然硅酸盐为主要原料烧成的制品,现代陶瓷又称新型陶瓷、精细陶瓷或特种陶瓷,常用非硅酸盐类化工原料或人工合成原料,而在陶瓷生产后需要取料机对陶瓷夹持,从而输送到另外一个加工台上对陶瓷进行加工。
3.在现有技术专利申请号“201620421016.4”提出的自动取料机,通过抓取电机输出轴转动,带动一体成形于抓取爪的扇形蜗轮转动,使两抓取爪一同向内或向外转动实现抓取动作,但该取料机无法对抓取后的物料进行防护,若在物料输送中由于意外导致物料的掉落,会直接导致物料的损坏,从而造成不必要的损失。
4.因此,有必要提供一种自动取料机解决上述技术问题。
技术实现要素:
5.本实用新型提供一种自动取料机,解决了现有的取料机无法对物料进行防护的问题。
6.为解决上述技术问题,本实用新型提供的自动取料机,包括:自动取料机本体;转动装置,所述转动装置固定于所述自动取料机本体上,所述转动装置包括固定板,所述固定板上固定连接有电动伸缩杆,所述电动伸缩杆的一端固定连接有齿板,所述自动取料机本体上转动连接有转动杆,所述转动杆上固定连接有齿轮;缓冲装置,所述缓冲装置固定于所述转动杆上,所述缓冲装置包括连接板,所述连接板的底端固定连接有滑动壳,所述滑动壳的内部滑动连接有支撑板,所述支撑板上固定连接有橡胶块,并且支撑板上固定连接有滑动杆,所述滑动杆的表面套接有第一弹簧。
7.优选的,所述固定板固定于所述自动取料机本体上,所述齿轮的表面与所述齿板的表面啮合。
8.优选的,所述自动取料机本体上固定连接有凸形块,所述齿板上开设有凸形槽,所述凸形块与所述凸形槽滑动连接。
9.优选的,所述转动杆共设置有两个,两个所述转动杆对称分布在所述自动取料机本体的两侧,并且两个转动杆上的结构相同。
10.优选的,所述连接板固定于所述转动杆的表面,所述滑动杆与所述滑动壳滑动连接,所述第一弹簧位于所述滑动壳的内部。
11.优选的,还包括,拆卸装置,所述拆卸装置固定于所述自动取料机本体上,所述拆卸装置包括肘臂,所述肘臂的内部开设有推动槽,所述推动槽的内部滑动连接有定位杆,所述定位杆的一端固定连接有滑动盘,所述滑动盘上固定连接有第二弹簧,所述自动取料机本体上开设有定位槽;卡接装置,所述卡接装置固定于所述滑动盘的内部,所述卡接装置包
括第一滑动槽,所述第一滑动槽的内部滑动连接有滑动块,所述滑动块上固定连接有卡接杆,所述肘臂上开设有第二滑动槽,并且肘臂上开设有卡接槽。
12.优选的,所述定位杆的一端与所述定位槽相适配,并且定位杆与所述肘臂滑动连接,所述卡接杆与所述卡接槽的一端相适配。
13.与相关技术相比较,本实用新型提供的自动取料机具有如下有益效果:
14.本实用新型提供一种自动取料机,通过电动伸缩杆带动齿轮旋转,由齿轮带动滑动壳旋转,从而将滑动壳旋转至物料的底部,滑动壳的内部设置有橡胶块,从而对夹持的物料进行防护,避免物料掉落会导致物料的损坏。
附图说明
15.图1为本实用新型提供的自动取料机的第一实施例实施例的结构示意图;
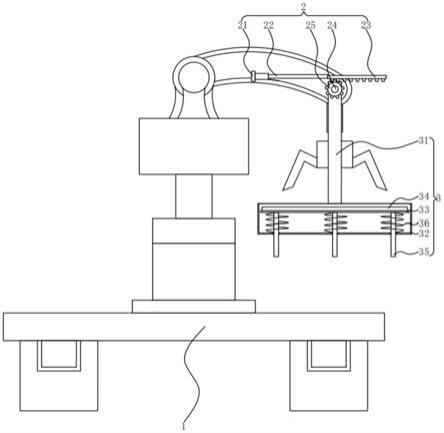
16.图2为本实用新型提供的自动取料机的第二实施例实施例的结构示意图;
17.图3为图2所示的滑动盘的剖视图。
18.图中标号:1、自动取料机本体,2、转动装置,21、固定板,22、电动伸缩杆,23、齿板,24、转动杆,25、齿轮,3、缓冲装置,31、连接板,32、滑动壳,33、支撑板,34、橡胶块,35、滑动杆,36、第一弹簧,4、凸形块,5、凸形槽,6、拆卸装置,61、肘臂,62、推动槽,63、定位杆,64、滑动盘,65、第二弹簧,66、定位槽,7、卡接装置,71、第一滑动槽,72、滑动块,73、卡接杆,74、第二滑动槽,75、卡接槽。
具体实施方式
19.下面结合附图和实施方式对本实用新型作进一步说明。
20.请结合参阅图1,其中,图1为本实用新型提供的自动取料机的第一实施例实施例的结构示意图。一种自动取料机包括:自动取料机本体1;转动装置2,所述转动装置2固定于所述自动取料机本体1上,所述转动装置2包括固定板21,所述固定板21上固定连接有电动伸缩杆22,所述电动伸缩杆22的一端固定连接有齿板23,所述自动取料机本体1上转动连接有转动杆24,所述转动杆24上固定连接有齿轮25;缓冲装置3,所述缓冲装置3固定于所述转动杆24上,所述缓冲装置3包括连接板31,所述连接板31的底端固定连接有滑动壳32,所述滑动壳32的内部滑动连接有支撑板33,所述支撑板33上固定连接有橡胶块34,并且支撑板33上固定连接有滑动杆35,所述滑动杆35的表面套接有第一弹簧36。
21.由外接电源为电动伸缩杆22提供电源,并且外接电源和电动伸缩杆22之间设置有控制开关,当电动伸缩杆22完全收缩会带动滑动壳32移动至物料的正下方。
22.所述固定板21固定于所述自动取料机本体1上,所述齿轮25的表面与所述齿板23的表面啮合。
23.齿轮25旋转会带动齿板23左右移动。
24.所述自动取料机本体1上固定连接有凸形块4,所述齿板23上开设有凸形槽5,所述凸形块4与所述凸形槽5滑动连接。
25.凸形块4和凸形槽5可以使齿板23只能左右移动。
26.所述转动杆24共设置有两个,两个所述转动杆24对称分布在所述自动取料机本体1的两侧,并且两个转动杆24上的结构相同。
27.两个转动杆24是对滑动壳32的两侧进行支撑。
28.所述连接板31固定于所述转动杆24的表面,所述滑动杆35与所述滑动壳32滑动连接,所述第一弹簧36位于所述滑动壳32的内部。
29.滑动杆35可以在滑动壳32的内部上下移动。
30.本实用新型提供的自动取料机的工作原理如下:
31.s1:当自动取料机本体1夹持物流后,由开关控制电动伸缩杆22的一端向左移动,电动伸缩杆22的一端向左移动会带动齿板23向左移动,齿板23向左移动会带动齿轮25旋转,齿轮25旋转会带动转动杆24旋转,转动杆24旋转会带动连接板31旋转,连接板31旋转会带动滑动壳32旋转,从而将滑动壳32旋转至物料的正下方。
32.s2:若物料在移动过程中掉落,由橡胶块34对掉落的物料进行防护,并且由于惯性物料会继续向下,从而由第一弹簧36的弹性与物料下落的惯性进行相互抵触,从而减少掉落对物料损坏。
33.与相关技术相比较,本实用新型提供的自动取料机具有如下有益效果:
34.通过电动伸缩杆22带动齿轮25旋转,由齿轮25带动滑动壳32旋转,从而将滑动壳32旋转至物料的底部,滑动壳32的内部设置有橡胶块34,从而对夹持的物料进行防护,避免物料掉落会导致物料的损坏。
35.第二实施例
36.请参阅图2和图3,基于本申请的第一实施例提供的一种自动取料机,本申请的第二实施例提出另一种自动取料机。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
37.具体的,本申请的第二实施例提供的自动取料机的不同之处在于,自动取料机,还包括,拆卸装置6,所述拆卸装置6固定于所述自动取料机本体1上,所述拆卸装置6包括肘臂61,所述肘臂61的内部开设有推动槽62,所述推动槽62的内部滑动连接有定位杆63,所述定位杆63的一端固定连接有滑动盘64,所述滑动盘64上固定连接有第二弹簧65,所述自动取料机本体1上开设有定位槽66;卡接装置7,所述卡接装置7固定于所述滑动盘64的内部,所述卡接装置7包括第一滑动槽71,所述第一滑动槽71的内部滑动连接有滑动块72,所述滑动块72上固定连接有卡接杆73,所述肘臂61上开设有第二滑动槽74,并且肘臂61上开设有卡接槽75。
38.第二弹簧65是对移动后的定位杆63进行复位。
39.所述定位杆63的一端与所述定位槽66相适配,并且定位杆63与所述肘臂61滑动连接,所述卡接杆73与所述卡接槽75的一端相适配。
40.定位杆63可以在肘臂61的内部滑动。
41.工作原理:
42.当需要对肘臂61进行拆卸时,向左拉动卡接杆73,卡接杆73向左移动会使卡接杆73不再与卡接槽75卡接,从而向上拉动卡接杆73,卡接杆73向上移动会带动滑动盘64向上移动,滑动盘64向上移动会带动定位杆63向上移动,定位杆63向上移动会使定位杆63的一端不再与定位槽66卡接,从而便可以取下肘臂61,从而可以根据物料的大小对肘臂61进行更换,从而使肘臂61上的抓取爪可以去不同大小的物料进行抓取。
43.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是
利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1