一种柔性薄膜张力控制机构及卷对卷柔性薄膜作业装置的制作方法
1.本实用新型涉及柔性薄膜作业装置技术领域,特别涉及一种柔性薄膜张力控制机构及卷对卷柔性薄膜作业装置。
背景技术:
2.柔性薄膜类产品(以下简称柔性薄膜)质地柔软且厚度非常薄,加工过程中,通常采用卷对卷的方式进行输送。在卷对卷输送的过程中,为了防止柔性薄膜因张力太小而松弛,或者,因张力太大而被破坏,通常需要对柔性薄膜的张力进行控制。
3.现有技术中,通过改变配重轮重量的方式对柔性薄膜的张力进行控制,该方法虽然能够实现柔性薄膜张力的控制,但是操作较为繁琐。
技术实现要素:
4.本实用新型提供了一种柔性薄膜张力控制机构及卷对卷柔性薄膜作业装置,用于改善现有技术中实现柔性薄膜张力控制操作较为繁琐的问题。
5.为达到上述目的,本实用新型提供以下技术方案:
6.一种柔性薄膜张力控制机构,包括:
7.横向间隔设置的第一导轮和第二导轮;
8.用于压设于位于所述第一导轮和所述第二导轮上的柔性薄膜上的配重轮;
9.至少两组位置检测组件,每组所述位置检测组件具有一个检测位置,各所述检测位置沿竖直方向间隔排布。
10.采用本实用新型提供的柔性薄膜张力控制机构时,第一导轮和第二导轮的位置是固定的,配重轮压在位于第一导轮和第二导轮之间的柔性薄膜上,柔性薄膜会因配重轮的重力而下坠,从而形成以第一导轮、配重轮以及第二导轮为顶点的三角形状态。配重轮在竖直方向上各位置时,配重轮两侧的柔性薄膜所成的夹角能够确定,加之配重轮的重量也是确定的,所以,根据配重轮在竖直方向上各位置处时,配重轮的重量大小始终与配重轮所受拉力的大小相等,以及配重轮所受拉力的值,与配重轮两侧柔性薄膜的张力在竖直方向上的分力的和相等,即可计算出配重轮处于各位置时柔性薄膜的张力;柔性薄膜的张力大小与配重轮在竖直方向上的位置相对应,通过至少两组位置检测组件能够限定配重轮在竖直方向上的位置区域,从而能够将柔性薄膜的张力控制在一定范围内。使得采用本实用新型提供的柔性薄膜张力控制机构实现柔性薄膜的张力控制时,借助位置检测组件即可,无需更换配重轮,能够简化操作。
11.此外,通过至少两组位置检测组件确定配重轮在竖直方向上的位置区域,还能够为周边其他机构的安装提供参考,使周边机构避让柔性薄膜,从而降低柔性薄膜接触其他物体而造成污染或者损伤的可能性。
12.可选地,柔性薄膜张力控制机构包括两组所述位置检测组件,其中,一组所述位置检测组件对应的检测位置用于所述配重轮的工作上限高度的检测,另一组所述位置检测组
件对应的检测位置用于所述配重轮的工作下限高度的检测;
13.或者,所述柔性薄膜张力控制机构包括三组所述位置检测组件,其中,一组所述位置检测组件对应的检测位置用于所述配重轮的理论上限高度的检测,一组所述位置检测组件对应的检测位置用于所述配重轮的工作上限高度的检测,一组所述位置检测组件对应的检测位置用于所述配重轮的工作下限高度的检测。
14.可选地,所述第一导轮、所述配重轮以及所述第二导轮共同限定出供柔性薄膜经过的薄膜区域;所述位置检测组件包括第一部和与所述第一部对应的第二部,所述第一部和对应的所述第二部一个位于所述薄膜区域的第一侧,一个位于所述薄膜区域的第二侧;
15.其中,所述第一部包括光发射部,所述第二部包括光反射部或者光接收部;
16.所述第一侧与所述第二侧相对。
17.本实用新型还提供一种卷对卷柔性薄膜作业装置,该卷对卷柔性薄膜作业装置包括薄膜卷出单元和薄膜卷取单元,所述薄膜卷出单元和所述薄膜卷取单元二者中至少一个设置有上述技术方案中提供的任意一种柔性薄膜张力控制机构。
18.本实用新型提供的卷对卷柔性薄膜作业装置中,薄膜卷出单元和薄膜卷取单元二者中至少一个设置有上述柔性薄膜张力控制机构,因而至少能够达到上述柔性薄膜张力控制机构所能够达到的有益效果,即实现柔性薄膜的张力控制时,借助位置检测组件即可,无需更换配重轮,能够简化操作。同时,通过至少两组位置检测组件确定配重轮在竖直方向上的位置区域,还能够为周边其他机构的安装提供参考,使周边机构避让柔性薄膜,从而降低柔性薄膜接触其他物体而造成污染或者损伤的可能性。
19.可选地,所述薄膜卷出单元和/或所述薄膜卷取单元包括;
20.料盒,用于将柔性薄膜料卷转动设置于其中;
21.用于带动所述柔性薄膜料卷绕其自身轴线转动的驱动单元。
22.可选地,所述柔性薄膜料卷包括卷芯,所述卷芯包括筒状部,所述驱动单元包括电机和与所述电机传动连接的连接轴,所述连接轴能够插入所述筒状部的空腔中,并与所述卷芯固接。
23.可选地,所述连接轴为气胀轴或机械胀轴。
24.可选地,所述电机为感应电机。
25.可选地,所述驱动单元包括离合器,所述离合器连接于所述连接轴与所述电机的输出轴之间。
26.可选地,卷对卷柔性薄膜作业装置包括离合器制动组件,所述离合器制动组件能够对所述离合器的输出端进行制动。
附图说明
27.图1为本实用新型实施例提供的一种柔性薄膜张力控制机构的示意图;
28.图2为本实用新型实施例提供的一种柔性薄膜张力控制机构三种状态(配重轮处于三个不同高度)时的示意图;
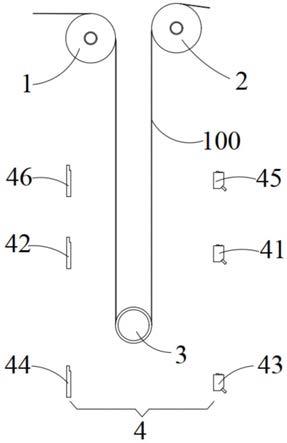
29.图3为本实用新型实施例提供的一种卷对卷柔性薄膜作业装置的示意图;
30.图4为本实用新型实施例提供的卷对卷柔性薄膜作业装置中驱动单元的结构示意图。
31.图标:1
‑
第一导轮;2
‑
第二导轮;3
‑
配重轮;4
‑
位置检测组件;41
‑
第一部a;42
‑
第二部a;43
‑
第一部b;44
‑
第二部b;45
‑
第一部c;46
‑
第二部c;5
‑
第三导轮;100
‑
柔性薄膜;200
‑
薄膜卷出单元;300
‑
薄膜卷取单元;201
‑
料盒;202
‑
电机;203
‑
连接轴;204
‑
离合器;205
‑
气缸;206
‑
挡块。
具体实施方式
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.请参照图1(图1仅为示意图,未体现出柔性薄膜100在第一导轮1、配重轮3以及第二导轮2之间的三角形状态),本实施例提供的一种柔性薄膜张力控制机构包括横向间隔设置的第一导轮1和第二导轮2、用于压设于位于第一导轮1和第二导轮2上的柔性薄膜100上的配重轮3以及至少两组位置检测组件4,其中,每组位置检测组件4具有一个检测位置,各检测位置沿竖直方向间隔排布。
34.采用本实用新型提供的柔性薄膜张力控制机构时,第一导轮1和第二导轮2的位置是固定的,配重轮3压在位于第一导轮1和第二导轮2之间的柔性薄膜100上,柔性薄膜100会因配重轮3的重力而下坠,从而形成以第一导轮1、配重轮3以及第二导轮2为顶点的三角形状态,如图2所示。配重轮3在竖直方向上各位置时,配重轮3两侧的柔性薄膜100所成的夹角能够确定,加之配重轮3的重量也是确定的,所以,根据配重轮3在竖直方向上各位置处时,配重轮3的重量大小始终与配重轮3所受拉力的大小相等,配重轮3所受拉力的值,与配重轮3两侧柔性薄膜100的张力在竖直方向上的分力的和相等,即可计算出配重轮3处于各位置时柔性薄膜100的张力;柔性薄膜100的张力大小与配重轮3在竖直方向上的位置相对应,通过至少两组位置检测组件4能够限定配重轮3在竖直方向上的位置区域,从而能够将柔性薄膜100中的张力控制在一定范围内。可见,采用本实用新型提供的柔性薄膜张力控制机构实现柔性薄膜100的张力控制时,借助位置检测组件4即可,无需更换配重轮3,能够简化操作。
35.此外,通过至少两组位置检测组件4确定配重轮3在竖直方向上的位置区域,还能够为周边其他机构的安装提供参考,使周边机构避让柔性薄膜100,从而降低柔性薄膜100接触其他物体而造成污染或者损伤的可能性。
36.配重轮3的设置能够使柔性薄膜100产生一定的张紧力,使柔性薄膜100缠绕地更加紧凑均匀,同时,有利于保证柔性薄膜100在输送过程中不会触碰到其他物体,从而避免柔性薄膜100被损伤或者污染。
37.配重轮3的大小及重量可根据柔性薄膜100的尺寸、重量等进行选择;配重轮3、第一导轮1和第二导轮2的材质均可以为pom(聚甲醛树脂)材质,以防划伤柔性薄膜100或者使柔性薄膜100产生静电。
38.第一导轮1和第二导轮2的高度可以相同,也可以不同。
39.具体设置上述各组位置检测组件4时,位置检测组件4的数量以及各组位置检测组件4所处的位置可以根据柔性薄膜100的尺寸、厚度及安全系数要求等设置。
40.一种实现方式中,各组位置检测组件4可以沿竖直方向间隔设置,位置检测组件4
对应的检测位置可以与该位置检测组件4的高度相同。
41.当柔性薄膜张力控制机构包括两组位置检测组件4时,一组位置检测组件4对应的检测位置可以用于配重轮3的工作上限高度的检测,另一组位置检测组件4对应的检测位置可以用于配重轮3的工作下限高度的检测。
42.当柔性薄膜张力控制机构包括三组位置检测组件4时,其中,一组位置检测组件4对应的检测位置可以用于配重轮3的理论上限高度的检测,一组位置检测组件4对应的检测位置可以用于配重轮3的工作上限高度的检测,一组位置检测组件4对应的检测位置可以用于配重轮3的工作下限高度的检测。
43.具体地,第一导轮1、配重轮3以及第二导轮2共同限定出供柔性薄膜100经过的薄膜区域;位置检测组件4可以包括第一部和与第一部对应的第二部,第一部和对应的第二部一个位于薄膜区域的第一侧,一个位于薄膜区域的第二侧。第一部包括光发射部,第二部包括光反射部或者光接收部,第一侧与第二侧相对。可选地,光发射部和对应的光接收部位于同一水平面内。
44.以位置检测组件4包括光发射部和光反射部,光发射部为对射光电开关,光反射部为反射板为例,利用光的反射原理,对射光电开关发出光束,并接收经反射板反射回来的光源,若对射光电开关与反射板之间存在物体时,则对射光电开关off状态,向卷对卷柔性薄膜作业装置的控制单元发送信号,以使驱动单元在控制单元控制进行相应动作。若对射光电开关与反射板之间不存在物体,则对射光电开关on状态,向卷对卷柔性薄膜作业装置的控制单元发送信号,以使驱动单元在控制单元控制进行相应动作。
45.下面以柔性薄膜张力控制机构包括两组位置检测组件4为例,进行说明:
46.请参照图2,具体地,第一组位置检测组件4的第一部记为a,第二部记为a,第一部a41和第二部a42位于同一水平面内;第二组位置检测组件4的第一部记为b,第二部记为b,第一部b43和第二部b44位于同一水平面内;柔性薄膜100依次经过第一导轮1的上方、配重轮3的下方以及第二导轮2的上方;第一部a41和第一部b43均位于薄膜区域的右侧,且第一部a41位于第一部b43的上方,即第一部a41和第二部a42用于配重轮3的工作上限高度的检测;第一部b43和第二部b44用于配重轮3的工作下限高度的检测。
47.如果配重轮3或柔性薄膜100位于第一部a41和第二部a42之间,则驱动单元在控制单元的控制下继续动作,以使柔性薄膜100继续输送;如果配重轮3或柔性薄膜100位于第一部b43和第二部b44之间,则驱动单元在控制单元的控制下停止动作,以停止柔性薄膜100的输送,从而保证柔性薄膜100的张力处于控制范围之内,保证柔性薄膜100的长度处于控制范围之内。
48.当柔性薄膜张力控制机构包括三组位置检测组件4时,在上述两组位置检测组件4的基础上,还包括第三组位置检测组件4,第三组位置检测组件4的第一部记为c,第二部记为c,第一部c45和第二部c46位于同一水平面内。第一部c45位于薄膜区域的右侧,且第一部c45位于第一部a41的上方,即第三组位置检测组件4用于配重轮3的理论上限高度的检测。
49.如果第二组位置检测组件4发生故障,配重轮3上升到第三组位置检测组件4对应的检测位置以上时,驱动单元在控制单元的控制下停止动作,卷对卷柔性薄膜作业装置停机,以停止柔性薄膜100的输送,从而防止柔性薄膜100因张力过大而被损伤或者拉断。
50.当然,在其他实施例中,也可以是各第一部均位于薄膜区域的左侧,各第二部均位
于薄膜区域的右侧;还可以是各第一部中,既有位于薄膜区域左侧的,又有位于薄膜区域右侧的。
51.以下对配重轮3两侧柔性薄膜100所受张力的计算过程进行说明:
52.配重轮3的重量记为g,配重轮3所受的拉力记为t,柔性薄膜100的张力记为f,配重轮3两侧柔性薄膜100所成的夹角记为θ(θ可以通过测量直接得到,也可以根据第一导轮1与第二导轮2之间的间距以及配重轮3的高度等换算得到),经受力分析可知:从而能可以推知柔性薄膜100的张力
53.请参照图3,本实施例提供的一种卷对卷柔性薄膜作业装置包括薄膜卷出单元200和薄膜卷取单元300,薄膜卷出单元200和薄膜卷取单元300二者中至少一个设置有上述柔性薄膜张力控制机构。
54.由于薄膜卷出单元200的卷出、薄膜卷取单元300的卷取以及配重轮3的作用,第一导轮1与第二导轮2间柔性薄膜100的长度会发生变化(亦即配重轮3高度变化),薄膜卷出单元200和薄膜卷取单元300至少一个设置有上述柔性薄膜张力控制机构,柔性薄膜张力控制机构中,第一导轮1和第二导轮2的位置是固定的,配重轮3压在位于第一导轮1和第二导轮2之间的柔性薄膜100上,柔性薄膜100会因配重轮3的重力而下坠,从而形成以第一导轮1、配重轮3以及第二导轮2为顶点的三角形状态,如图2所示。配重轮3在竖直方向上各位置时,配重轮3两侧的柔性薄膜100所成的夹角能够确定,加之配重轮3的重量也是确定的,所以,根据配重轮3在竖直方向上各位置处时,配重轮3的重量大小始终与配重轮3所受拉力的大小相等,配重轮3所受拉力的值,与配重轮3两侧柔性薄膜100的张力在竖直方向上的分力的和相等,即可计算出配重轮3处于各位置时柔性薄膜100的张力;柔性薄膜100的张力大小与配重轮3在竖直方向上的位置相对应,通过至少两组位置检测组件4能够限定配重轮3在竖直方向上的位置区域,从而能够将柔性薄膜100中的张力控制在一定范围内。可见,本实施例提供的卷对卷柔性薄膜作业装置在实现柔性薄膜100的张力控制时,借助位置检测组件4即可,无需更换配重轮3,能够简化操作,借助位置检测组件4即可,无需更换配重轮3,能够简化操作。
55.此外,通过至少两组位置检测组件4确定配重轮3在竖直方向上的位置区域,还能够为周边其他机构的安装提供参考,使周边机构避让柔性薄膜100,从而降低柔性薄膜100接触其他物体而造成污染或者损伤的可能性。
56.可选地,薄膜卷出单元200和薄膜卷取单元300之间可以设有薄膜输送单元,以实现柔性薄膜100在薄膜卷出单元200与薄膜卷取单元300之间的传输。
57.可选地,柔性薄膜张力控制机构还包括第三导轮5,第三导轮5较第一导轮1和第二导轮2靠近柔性薄膜料卷,用于压在柔性薄膜100上。第一导轮1、第二导轮2以及第三导轮5均转动设置于对应的薄膜卷出单元200或者薄膜卷取单元300的本体上。
58.一种实现方式中,薄膜卷出单元200或者薄膜卷取单元300,或者薄膜卷出单元200和薄膜卷取单元300包括本体、用于将柔性薄膜料卷转动设置于其中的料盒201,以及用于带动柔性薄膜料卷绕其自身轴线转动的驱动单元,料盒201和驱动单元均设置于本体上。
59.具体地,柔性薄膜料卷包括卷芯,柔性薄膜100缠绕于卷芯上,如图4所示,卷芯包
括筒状部,驱动单元包括电机202和与电机202传动连接的连接轴203,连接轴203能够插入筒状部的空腔中,并与卷芯固接。
60.为了使得柔性薄膜料卷的更换更为便捷,连接轴203可以为气胀轴或机械胀轴。
61.柔性薄膜料卷的卷芯的内径通常为1inch或者3inch,气胀轴的尺寸与卷芯的内径相匹配,通过空气阀开关能够实现气胀轴胀芯的膨胀与回缩,从而固定柔性薄膜100的卷芯。
62.为了能够实现柔性薄膜100在薄膜卷出单元200与薄膜卷取单元300之间的可逆传输,电机202可以为感应电机。
63.感应电机一般自带减速器,可以为不同的柔性薄膜100选择不同转数及减速比的电机202。
64.为了使得在柔性薄膜100上料、下料及卷对卷柔性薄膜作业装置手动调节时连接轴203能够旋转,一种实现方式中,驱动单元包括离合器204,离合器204连接于连接轴203与电机202的输出轴之间,具体地,离合器204可以通过联轴器与电机202的输出轴连接。
65.具体地,离合器204可以通过衔接轴与连接轴203连接。
66.进一步地,卷对卷柔性薄膜作业装置包括离合器制动组件,离合器制动组件能够对离合器204的输出端进行制动,以在设备故障需要暂停输送柔性薄膜100时,保持柔性薄膜料卷不再进行相应的收料或者放料。
67.离合器204的输出端即离合器204的从动端,离合器204背离电机的一端。
68.具体地,离合器制动组件包括气缸205和连接于气缸205的活塞杆的自由端的挡块206。
69.卷对卷柔性薄膜作业装置正常工作时,气缸205的活塞杆为缩回状态,当卷对卷柔性薄膜作业装置或者厂房出现断电的情况时,气缸205的活塞杆伸出,挡块206会抵住离合器204的输出端,以防止连接轴转动造成柔性薄膜100的滑落或损伤。
70.可选地,挡块206为聚氨酯材料部品,聚氨酯材料部品耐磨性好,且防滑,不但有利于延长挡块206的使用寿命,而且挡停离合器204输出端的效果更好。
71.本实施例中提到的柔性薄膜100可以为cof(chip on flex,or,chip on film,中文名称覆晶薄膜)。
72.显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1