一种无人化钢卷堆垛车的制作方法
[0001]
本实用新型涉及无人化钢卷库系统技术领域,特别是涉及一种无人化钢卷堆垛车。
背景技术:
[0002]
目前,智能化无人调度系统在国外已经广泛应用于钢卷库房管理,国内也有部分钢厂陆续采用无人化智能调度系统替换原有管理方式。但是,由于钢卷重量较重,目前国内、外无人化钢卷堆垛基本上都是通过对现有的钢卷吊车进行智能化改造来实现,还是无法克服吊车自身存在的投资费用高、各跨之间吊车不能共用、维护成本高、高空作业安全性差、属特种设备限制多等缺陷。
[0003]
因此,目前缺乏一种既可以克服无人化吊车存在的缺陷,又同时能够满足钢卷库无人化堆垛需求的堆垛设备。
技术实现要素:
[0004]
鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种无人化钢卷堆垛车,用于解决现有技术中钢卷堆垛不便、成本高等问题。
[0005]
为实现上述目的及其他相关目的,本实用新型提供一种无人化钢卷堆垛车,包括车体、升降装置以及旋转台架,所述升降装置安装在车体上,并能够沿竖直方向升降运动,所述旋转台架转动安装在升降装置上,所述旋转台架上安装有伸缩叉,所述旋转台架带动伸缩叉与其一同旋转,并通过伸缩叉伸缩转移钢卷。
[0006]
本实用新型的有益效果是:结构简单、占用空间小,便于升降、旋转、收缩运动取放钢卷,钢卷堆垛转移操作方便,降低了成本。
[0007]
可选地,所述车体包括车架和导向机构,所述导向机构安装在车架上,并与升降装置配合进行升降导向。
[0008]
可选地,所述导向机构包括四组导向辊组,四组导向辊组分别位于车架相对的两侧,每组导向辊组均包括辊轴和导向辊,所述导向辊安装在辊轴上,位于车架同一侧的其中两组导向辊组的导向辊与辊轴偏心设置,且两个导向辊呈v型分布。
[0009]
可选地,所述升降装置包括一级升降机构和二级升降机构,所述一级升降机构安装在车架上,并与导向机构滑动配合,所述二级升降机构安装在所述一级升降机构上,并沿一级升降机构升降,所述旋转台架转动安装在二级升降机构上。
[0010]
可选地,所述一级升降机构包括一级升降架和一级驱动机构,所述一级驱动机构安装在车体上,并与一级升降架连接驱动一级升降架升降,所述一级升降架的外侧安装有与导向机构配合的滑板。
[0011]
可选地,所述二级升降机构包括二级升降架和二级驱动机构,所述二级驱动机构安装在一级升降机构上,并与二级升降架连接驱动二级升降架升降,所述旋转台架通过回转支承安装在二级升降架上,并通过安装在二级升降架上的旋转驱动机构驱动旋转台架转
动。
[0012]
可选地,所述车体上还安装有供电装置、车体驱动机构以及车轮。
[0013]
可选地,所述供电装置为蓄电池组或cps非接触供电装置。
[0014]
可选地,还包括用于控制车体移动、升降装置升降、旋转台架旋转、以及伸缩叉伸缩的控制柜。
[0015]
可选地,所述升降装置上设有位移传感器,所述控制柜根据位移传感器反馈控制升降装置的升降高度。
[0016]
采用上述可选地方案的有益效果是:结构简单、节省空间,运行灵活稳定,提高钢卷堆垛的精准性,安全可靠,而且能够适应不同跨间距的应用,降低了成本。
附图说明
[0017]
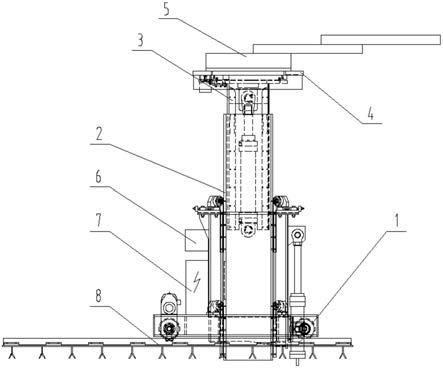
图1显示为本实用新型无人化钢卷堆垛车的结构示意图;
[0018]
图2显示为本实用新型无人化钢卷堆垛车的车体的结构示意图;
[0019]
图3显示为本实用新型无人化钢卷堆垛车的一级升降机构的结构示意图;
[0020]
图4显示为本实用新型无人化钢卷堆垛车的二级升降机构的结构示意图;
[0021]
图5显示为本实用新型无人化钢卷堆垛车的导向机构与一级升降机构安装配合的俯视图;
[0022]
图6显示为本实用新型无人化钢卷堆垛车的导向辊组的结构示意图;
[0023]
图7显示为本实用新型无人化钢卷堆垛车的导向辊组的剖视图。
[0024]
零件标号说明
[0025]
1
ꢀꢀꢀꢀꢀꢀꢀ
车体;
[0026]
11
ꢀꢀꢀꢀꢀꢀ
车架;
[0027]
13
ꢀꢀꢀꢀꢀꢀ
车体驱动机构;
[0028]
14
ꢀꢀꢀꢀꢀꢀ
车轮;
[0029]
15
ꢀꢀꢀꢀꢀꢀ
导向辊组;
[0030]
151
ꢀꢀꢀꢀꢀ
导向辊;
[0031]
152
ꢀꢀꢀꢀꢀ
辊轴;
[0032]
2
ꢀꢀꢀꢀꢀꢀꢀ
一级升降机构;
[0033]
21
ꢀꢀꢀꢀꢀꢀ
一级升降架;
[0034]
22
ꢀꢀꢀꢀꢀꢀ
一级驱动机构;
[0035]
23
ꢀꢀꢀꢀꢀꢀ
滑板;
[0036]
24
ꢀꢀꢀꢀꢀꢀ
一级驱动机构支架;
[0037]
3
ꢀꢀꢀꢀꢀꢀꢀ
二级升降机构;
[0038]
31
ꢀꢀꢀꢀꢀꢀ
二级升降架;
[0039]
32
ꢀꢀꢀꢀꢀꢀ
二级驱动机构;
[0040]
4
ꢀꢀꢀꢀꢀꢀꢀ
旋转台架;
[0041]
41
ꢀꢀꢀꢀꢀꢀ
回转支撑;
[0042]
42
ꢀꢀꢀꢀꢀꢀ
旋转驱动机构;
[0043]
5
ꢀꢀꢀꢀꢀꢀꢀ
伸缩叉;
[0044]
6
ꢀꢀꢀꢀꢀꢀꢀ
控制柜;
[0045]
7
ꢀꢀꢀꢀꢀꢀꢀ
供电装置;
[0046]
8
ꢀꢀꢀꢀꢀꢀꢀ
轨道。
具体实施方式
[0047]
以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。
[0048]
需要说明的是,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
[0049]
在对本实用新型实施例进行详细叙述之前,先对本实用新型的应用环境进行描述。本实用新型的技术主要是应用于钢卷库系统中,特别是应用于钢卷堆垛。本实用新型是解决传统钢卷堆垛只能通过吊车进行,传统的堆垛车无法实现钢卷堆垛的问题。
[0050]
如图1所示,本实用新型的无人化钢卷堆垛车,包括车体1、升降装置以及旋转台架4,升降装置安装在车体1上,并能够沿竖直方向升降运动,旋转台架4转动安装在升降装置上,旋转台架4上安装有伸缩叉5,旋转台架4带动伸缩叉5与其一同旋转,并通过伸缩叉5伸缩转移钢卷。
[0051]
本实用新型的无人化钢卷堆垛车通过车体、升降装置、旋转台架配合使得伸缩叉能够移动、升降、旋转到指定位置,再伸缩取放钢卷,结构简单,运行稳定灵活,钢卷堆垛转移方便,既能将钢卷库的鞍座上的钢卷移送到旋转台架上去,也能将钢卷从旋转台架上移送到钢卷库的鞍座上,实现双向移送存储,成本低。
[0052]
如图1、图2、图5至图7所示,在一示例性实施例中,车体1包括车架11和导向机构,导向机构安装在车架11上,并与升降装置配合进行升降导向。车架11可以采用焊接结构件,既能保证结构强度,又能为导向机构、升降装置、旋转台架等安装在车体上的部件提供支撑。其中,导向机构包括四组导向辊组15,四组导向辊组15分别位于车架11相对的两侧,每组导向辊组15均包括辊轴152和导向辊151,导向辊151转动安装在辊轴152上,位于车架11同一侧的其中两组导向辊组的导向辊151与辊轴152偏心设置,导向辊151与辊轴152的偏心距离d1可以根据需求设置。同一侧各组导向辊组的导向辊和辊轴偏心设置,便于调整升降装置与该偏心设置的导向辊之间的间隙,提升升降装置升降过程中的稳定性。且同一侧的两组导向辊组的两个导向辊呈v型分布,采用v型布局方式,提高升降装置与导向辊滑动接触配合的稳定性,不易脱离,运动导向更加灵活稳定。
[0053]
如图1至图4所示,在一示例性实施例中,升降装置包括一级升降机构2和二级升降机构3,一级升降机构2安装在车架11上,并与导向机构滑动配合,二级升降机构3安装在一级升降机构2上,并沿一级升降机构2升降,旋转台架4转动安装在二级升降机构3上。采用分级升降,在满足升降高度的同时减小多空间的占用,并且有利于保证结构强度及稳定性,才能够移送重量较重的钢卷。其中,一级升降机构2包括一级升降架21和一级驱动机构22,一级驱动机构22可以采用电液直驱液压缸。一级驱动机构22下端可以通过一级驱动机构支架
24安装在车体1上,上端可以通过铰接轴支架与一级升降架21连接,并带动一级升降架21升降。一级升降架21可以采用焊接结构,可以焊接为长方体形框架,内部形成用于安装二级升降机构的升降通道,节省布局空间,并且有利于二级升降机构在升降通道内稳定升降。车架11的一侧设有槽孔,使得一级升降架的铰接轴支架沿槽孔滑动通行。一级升降架21的外侧安装有与导向机构配合的滑板23,在本实施例中,一级升降架21相对设置的两侧上均设有滑板23,滑板23对称设置,滑板23的外侧的两个斜面呈与v型分布,两个斜面分别与两个对应的导向辊151贴合,减小滑动摩擦,又能提高一级升降机构升降运动的稳定性。为了提高一级升降机构2升降的稳定性,还可以根据升降高度需求选择滑板在竖直方向上的设置数量,在本实施例中,一级升降架21沿其竖直方向上设有两块滑板,两块滑板23分布在一级升降架21的上端和下端,车架11上设有与滑板23对应的导向辊,并且位于一级升降架21同一侧的导向辊均可以偏心设置,便于在升降过程中灵活自适应调整与一级升降架21的间隙,提高升降稳定性。
[0054]
如图1至图5所示,在一示例性实施例中,二级升降机构3包括二级升降架31和二级驱动机构32,二级驱动机构32可以采用电液直驱液压缸。二级驱动机构32安装在一级升降机构2的一级升降架21内,并带动二级升降架31沿着升降通道升降,从而实现旋转台架4的升降。二级驱动机构32的下端固定安装在一级升降架21内,二级升降机构32的上端可以通过铰接轴与二级升降架31连接,并驱动二级升降架升降。旋转台架4可以通过回转支承41安装在二级升降架31上,并通过安装在二级升降架31上的旋转驱动机构42驱动旋转台架4转动。其中,回转支承41可以采用外齿式结构,旋转驱动机构42可以为电机,通过电机驱动齿轮来驱动旋转台架正向或反向旋转,实现钢卷的双向存储。伸缩叉5可以采用重型伸缩叉,保证其结构强度能够承受钢卷的重量。
[0055]
如图1至图5所示,在一示例性实施例中,还包括用于控制车体1移动、升降装置升降、旋转台架4旋转、以及伸缩叉5伸缩的控制柜6。升降装置上设有位移传感器,在本实施例中,一级升降机构2、二级升降机构3上均设有位移传感器,一级升降机构2的位移传感器设置在一级驱动机构22上,二级升降机构3的位移传感器设置在二级驱动机构32上,控制柜6根据对应位移传感器的反馈控制对应升降机构的升降高度,用于对各级升降机构升降高度进行精确控制。车体1上还安装有供电装置7、车体驱动机构13以及车轮14。其中,供电装置7和控制柜6均可以安装在车架11上,车体驱动机构13可以为齿轮马达,齿轮马达带有编码器,车体驱动机构13驱动车轮14沿轨道8移动,便于控制速度,实现精确定位。供电装置7可以根据需求选择采用蓄电池组或cps非接触供电装置,通过供电装置7为各电气装置提供电力供应。通过控制柜与各电气装置配合实现无人化钢卷堆垛车的远程控制,操作简单方便,移动、升降、旋转定位更加精确,并且无需工作人员现场指挥操作,提高了安全性能。
[0056]
其工作过程为:当需要堆垛车接送钢卷时,控制车体驱动机构驱动车体到达指定钢卷位置,伸缩叉伸出,到达钢卷底部中心位置,一级驱动机构驱动一级升降架提升,将钢卷提升到预定位置,伸缩叉缩回,将钢卷运送到旋转台架的中心位置,一级驱动机构带动一级升降架下降复位;然后控制柜根据钢卷需要存放的位置,通过传感器控制旋转驱动机构,精确驱动回转支承旋转到伸缩叉方向与钢卷存放方向一致的位置,车体驱动机构驱动车体运行到钢卷存放位置,一级驱动机构驱动一级升降架提升,如果提升高度达到预定位置,则伸缩叉再次伸出,将钢卷移送到指定鞍座后,再缩回,一级驱动机构带动一级升降架下降复
位,如果提升高度达不到预定位置,则二级升降驱动机构带动二级升降架继续提升钢卷到预定位置,伸缩叉伸出,将钢卷移送到指定鞍座后,再缩回,二级驱动机构先带动二级升降架下降复位后,一级驱动机构再带动一级升降架下降复位。
[0057]
本实用新型的无人化钢卷堆垛车通过采用重型伸缩叉实现钢卷的接送;采用两级升降机构来实现升降,不仅保证结构强度,还能降低升降机构在未工作状态时的自身高度,对工作环境降低了要求;通过旋转台架带动伸缩叉旋转,实现钢卷的双向存储;通过配备供电装置,实现动力储备,使得各电气装置能够稳定运行;通过控制柜实现远程控制,提高安全性能和操作便捷性。该无人化钢卷堆垛车通过车体、升降装置、旋转台架、伸缩叉、供电装置、控制柜等部件配合,在实现钢卷无人化堆垛的同时,降低了成本,提高了安全性能,并能够满足不同间距的跨与跨之间的钢卷转运,应用广泛,通用性强。
[0058]
上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1