一种关节码垛机的制作方法
1.本实用新型涉及了包装运输设备领域,具体是一种关节码垛机。
背景技术:
2.企业在产品生产完成后,需要将产品进行包装、装箱、搬运、整理、排列、堆码,由于人工进行搬运、整理、排列、堆码存在着劳动强度过大,速度过于缓慢等缺陷,不能适应现代企业高效生产和快速物流仓储的要求,码垛机应运而生,码垛机是将已装入容器的纸箱,按一定排列码放在托盘、栈板上,进行堆码,可堆码多层,然后推出,便于叉车运至仓库储存,现有的码垛机主要分为两类,一类是全自动机械手码垛机,码垛作业灵活,但是造价高昂,另一类是简易码垛机,结构简单、市场价格不高,但是活动范围小,动作固定,适用性不强。
技术实现要素:
3.为了克服现有技术中的缺陷,本实用新型实施例提供了一种关节码垛机。
4.本技术实施例公开了:一种关节码垛机,包括底座、回转支撑机构、立柱、动力机构、连接块、关节机构、第一导轨滑块机构和夹持机构,所述回转支撑机构安装在底座上,所述立柱连接在回转支撑机构上端,所述动力机构设置在立柱顶部,所述第一导轨滑块机构设置在立柱的侧面,所述连接块固定连接在第一导轨滑块机构的滑块上并随着滑块沿着导轨滑移、所述关节机构设置在连接块上,所述夹持机构设置在关节机构的端部,所述关节机构包括第一旋转臂和第二旋转臂。
5.优选的,所述动力机构包括伺服电机和连接在伺服电机动力输出轴上的双轴减速机,所述双轴减速机的两个动力输出轴上均固定安装有主动链轮,所述立柱下端内部可转动式安装有从动链轮,且主动链轮与从动链轮通过链条连接,所述连接块与所述链条固定连接。
6.优选的,所述关节机构包括第一旋转臂、第二旋转臂、t型安装块、第一电机、第二电机和第三电机,所述t型安装块固定安装在连接块上,所述第一电机的壳体固定安装在t型安装块上,所述第一电机的动力输出轴贯穿t型安装块与第一旋转臂的一端部固定连接,所述第二电机的壳体固定安装在第一旋转臂的另一端上方且第二电机的动力输出轴贯穿第一旋转臂与下方的第二旋转臂固定连接,所述第三电机的壳体固定安装在第二旋转臂末端的上方,且第三电机的动力输出轴上固定安装有连接柱。
7.优选的,所述第二旋转臂设置为z字型。
8.优选的,所述夹持机构包括水平方向设置的安装板、竖直方向设置的第一夹板、与第一夹板平行设置的第二夹板、气缸和第二导轨滑块机构,所述第一夹板垂直固定安装在所述安装板的端部,所述第二导轨滑块机构的导轨固定安装在安装板的下底面,所述第二夹板固定安装所述第二导轨滑块机构的滑块上,所述气缸的缸体固定连接在所述安装板的下底面,所述气缸的活塞杆与第二夹板固定连接,所述安装板的上表面还与所述连接柱的下端部固定连接。
9.优选的,所述第一夹板、第二夹板相对的板面上均设置有橡胶垫。
10.本实用新型的有益效果如下:本实用新型结构简单,通过设置动力机构和链轮链条传动机构,实现夹持机构上下移动,运动平稳快速,通过设置两级关节机构实现夹持机构在水平面的移动,扩展了夹持机构在水平面的活动范围,增加了夹持机构的作业区域,提高了该使用新型的适用性。
11.为让本实用新型的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
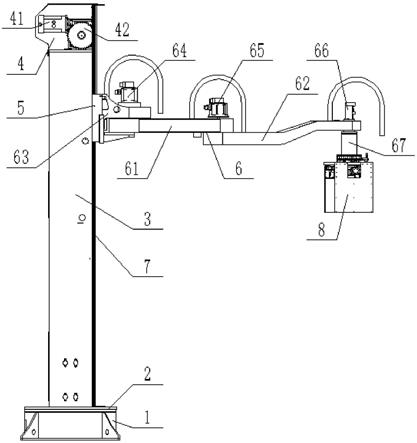
13.图1是本实用新型的正视图;
14.图2是本实用新型的夹持机构三维结构示意图。
15.以上附图的附图标记:底座1,回转支撑机构2,立柱3,动力机构4,连接块5,关节机构6,第一导轨滑块机构7,夹持机构8,伺服电机41,主动链轮42,第一旋转臂61,第二旋转臂62,t型安装块63,第一电机64,第二电机65,第三电机66,安装板81,第一夹板83,气缸84,第二导轨滑块机构85,第二夹板86,橡胶垫87。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.一种关节码垛机,包括底座1、回转支撑机构2、立柱3、动力机构4、连接块5、关节机构6、第一导轨滑块机构7和夹持机构8,所述回转支撑机构2安装在底座1上,所述立柱3连接在回转支撑机构2上端,所述动力机构4设置在立柱顶部,所述第一导轨滑块机构7设置在立柱3的侧面,所述连接块5固定连接在第一导轨滑块机构7的滑块上并随着滑块沿着导轨滑移、所述关节机构6设置在连接块5上,所述夹持机构8设置在关节机构6的端部,所述关节机构6包括第一旋转臂61和第二旋转臂62,第一旋转臂61、第二旋转臂62能在水平面上相对转动动作,夹持机构8用于夹持需要搬运的产品。
18.进一步地,所述动力机构4包括伺服电机41和连接在伺服电机41动力输出轴上的双轴减速机,所述双轴减速机的两个动力输出轴上均固定安装有主动链轮42,所述立柱3下端内部可转动式安装有从动链轮(图中未画出标号),且主动链轮42与从动链轮通过链条连接,所述连接块5与所述链条固定连接,主动链轮42和从动链轮转动、链条在竖直方向动作,从而带动连接块5上下移动。
19.进一步地,所述关节机构6包括第一旋转臂61、第二旋转臂62、t型安装块63、第一电机64、第二电机65和第三电机66,所述t型安装块63固定安装在连接块5上,所述第一电机
64的壳体固定安装在t型安装块63上,所述第一电机64的动力输出轴贯穿t型安装块63与第一旋转臂61的一端部固定连接,第一电机64驱动第一旋转臂61绕着第一电机64的动力输出轴转动,所述第二电机65的壳体固定安装在第一旋转臂61的另一端上方且第二电机65的动力输出轴贯穿第一旋转臂61与下方的第二旋转臂62固定连接,第二电机65驱动第二旋转臂62绕第二电机65的动力输出轴转动,所述第三电机66的壳体固定安装在第二旋转臂62末端的上方,且第三电机66的动力输出轴上固定安装有连接柱67。
20.进一步地,所述第二旋转臂62设置为z字型,当第二电机65驱动第二旋转臂62绕第二电机65的动力输出轴大角度转动时,第二旋转臂62的斜板部位与第一旋转臂61接触,避免第三电机66碰到第一旋转臂61,造成第三电机66损坏。
21.进一步地,所述夹持机构8包括水平方向设置的安装板81、竖直方向设置的第一夹板83、与第一夹板83平行设置的第二夹板86、气缸84和第二导轨滑块机构85,所述第一夹板83垂直固定安装在所述安装板81的端部,所述第二导轨滑块机构85的导轨固定安装在安装板81的下底面,所述第二夹板86固定安装所述第二导轨滑块机构85的滑块上,随着滑块沿着导轨滑移,所述气缸84的缸体固定连接在所述安装板81的下底面,所述气缸84的活塞杆与第二夹板86固定连接,推动第二夹板86沿着第二导轨滑块机构85滑移,所述安装板81的上表面还与所述连接柱67的下端部固定连接,第三电机66转动驱动夹持机构8转动。
22.进一步地,所述第一夹板83、第二夹板86相对的板面上均设置有橡胶垫87,当第一夹板83、第二夹板86夹持产品时起到防滑缓冲的作用,防止产品脱落和压伤。
23.进一步地,所述回转支撑机构2底部还安装有用于驱动立柱3转动的驱动装置。
24.工作原理:该码垛机工作时,动力机构4驱动主动链轮42转动,链条在竖直方向动作,从而带动关节机构6、夹持机构8上下移动,第一电机64驱动第一旋转臂61绕着第一电机64的动力输出轴转动,第二电机65驱动第二旋转臂62绕第二电机65的动力输出轴转动,第三电机66转动驱动夹持机构8旋转运动,气缸84推动第二夹板86沿着第二导轨滑块机构85滑移,当第二夹板86沿着第一夹板83方向移动时,能夹紧产品,反之松开产品。
25.本实用新型中应用了具体实施例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1