一种餐厨湿料车车载控制系统的制作方法
1.本实用新型涉及餐厨垃圾处理领域,尤其涉及应用人工智能的对餐厨湿料垃圾上料车的控制领域。
背景技术:
2.生化处理机是餐厨垃圾处理的核心设备,所处理的餐厨垃圾分湿料和干料两种。在生化处理机处理餐厨垃圾过程中,需要使用上料小车将湿料和干料送入生化处理机进料口。通常情况下,上料小车在位于生化处理机上部的高架轨道上运输餐厨垃圾,轨道下并排部署有生化机处理机。
3.在运输湿料时,由于餐厨湿料中含有大量液体成分,在倾翻过程中,由于湿料液面会随上料小车的倾翻而降低,导致湿料倾倒的抛物线发生变化,必然导致落料点变化,从而产生遗撒现象。
4.同时,由于餐厨湿料中包含的固体成分通常集中在上料小车底部。当湿料的液体成分在倾翻过程中先流出后,固体成分容易遗留在小车底部,造成上料小车的实际运输能力下降,实际输入餐厨垃圾生化处理机的物料误差。一方面降低处理效率,另一方面会影响餐厨垃圾生化处理机的无害化处理工艺,造成各种问题。
5.本实用新型基于plc系统,结合车身传感器和编码器反馈的信息对上料小车的行走和侧翻进行控制,使得餐厨湿料能够被精确倒入生化处理机进料口中。同时,本实用新型还基于各种传感器和编码器控制上料小车行走距离和速度,当传感器探测到控制逻辑中出现的各种情况时,及时控制上料小车进行急停、抖动、自动校正等动作,实现了餐厨湿料的自动上料。
技术实现要素:
6.本实用新型提出了一种餐厨湿料车车载控制系统,具体方案如下:
7.一种餐厨湿料车车载控制系统,包括行走机构、侧翻机构、通信模块和控制模块,其中:
8.行走机构用于接收控制模块指令,控制上料小车行走速度和位移并反馈指令执行情况;
9.侧翻机构用于接收控制模块指令,控制上料小车货斗侧翻的角度和速度并反馈指令执行情况;
10.通信模块用于收发上料小车状态数据和指令;
11.控制模块用于接收上料小车状态数据,生成和/或转发指令,
12.其特征在于,还包括称重传感器、倾翻编码器和行走编码器,其中:
13.称重传感器,用于采集上料小车中装入的餐厨湿料重量信息;
14.倾翻编码器,用于采集上料小车货斗的倾翻角度信息;
15.行走编码器,用于采集上料小车的行走位置和距离信息;
16.所述控制模块读取称重传感器、倾翻编码器和行走编码器传来的数据,在倒料过程中调整上料小车倾翻状态和小车距倒料口位置,动态调整小车行走,控制上料小车将餐厨湿料倒入生化处理器进料口。
17.进一步的,所述控制模块在倒料过程中实时读取称重传感器信息,随餐厨湿料重量的减小而加大上料小车货斗的倾翻速度和角度。
18.进一步的,所述控制模块在倒料过程中实时读取称重传感器信息和小车位置信息,随餐厨湿料重量的减小而控制上料小车向生化处理器进料口落料点调整。
19.进一步的,所述控制模块记录本次上料的重量,按照下述方式预估下次装料的重量,并控制停止装料重量每次进行动态调整,通过通信模块传递给上位机:
20.下料量=设定量
‑
溜量
‑
提前量
21.提前量=最终装料量
‑
装料停止量
22.本次加料量=本次设定量
‑
上次偏差量
23.其中:下料量为:出料设备停止进料的重量;
24.溜量为:出料设备停止后增加的重量;
25.提前量为:出料设备按设定值停止的重量;
26.本次设定量为:本次上料过程中上料小车需要装载的重量;
27.上次偏差量为:上料小车上次上料需要装载的重量与设定值的差值。
28.进一步的,所述控制模块在倒料过程中实时读取称重传感器信息,当餐厨湿料重量小于系统设定阈值时发出抖动指令,控制倾翻机构进行往返抖动和行走机构进行往复运动。
29.进一步的,所述餐厨湿料车车载控制系统还包括与信息处理模块相连的备用无线遥控模块,当网线通信模块系统故障时用于直接通过遥控器发送控制指令。
30.进一步的,还包括漫反射探测器,用于探测障碍物或上料小车行程极限位置。
31.进一步的,具有与控制模块连接的扩展模块,用于扩展所述控制模块的数据接口。
32.进一步的,所述行走编码器在上料小车位于接料位时,向控制模块发送位置校正信息。
33.进一步的,所述倾翻编码器和行走编码器为格雷绝对值编码器。
34.使用上述餐厨湿料车车载控制系统,能够在餐厨湿料上料过程中调整落料点,解决了餐厨垃圾生化处理机在湿料上料过程中,不能把湿料精确倒入进料口,遗撒量过大的问题。同时,基于plc的控制模块还能在上料小车倾翻上料的过程中基于车内湿料重量变化情况,自动进行倾翻机构和行走机构的抖动,减少了餐厨湿料在上料小车内的遗留量。
附图说明
35.图1为本实用新型一个实施例的使用环境示意图;
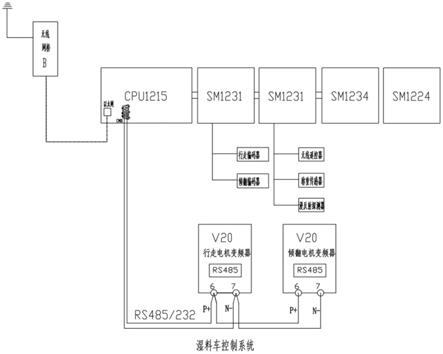
36.图2为本实用新型一个实施例的系统构成示意图;
37.图3位本实用新型一个实施例的指令表。
38.其中,1、2
‑
上料小车;3
‑
装料工位;4
‑
高架料仓;5
‑
上料车清洗间。
具体实施方式
39.图1是本实用新型一个实施例的使用环境示意图,为便于讲述,图1中仅做示意性标记。
40.餐厨垃圾处理车间具有二层结构,最高处为高架料仓,存储有未经处理的餐厨垃圾。上料小车位于架设在二层的导轨上运行,且轨道具有主用线和备用线两条。每条轨道上设置有两辆上料小车,可以同时使用,也可以相互备用。在一条轨道上同时使用两辆上料小车时,轨道应被设置为环形。车间一层中设置有多台餐厨垃圾生化处理机,但为进料方便,车间中只有一个料仓。因此需要使用上料小车向各个生化处理机的进料口运输餐厨湿料。
41.在图1中示出的上料小车上,安装有本实用新型所述的车载系统。所述车载系统由蓄电池提供能量,通过无线网桥与外界进行数据交换。同时,在上料小车车身上和运行导轨上还安装有声光报警器传感器和探测器,能够提高上料小车运行时的安全性。当系统运行时,车载系统自动与生化处理机和其他小车进行通信,按照餐厨垃圾无害化处理的工艺要求自动运行,具备前后行走、倾翻卸料、称重、自动清洗、故障自诊断、安全报警、通信传输等功能。本实施例的小车外形尺寸≤3500mm(长)
×
2600mm(宽)
×
1500mm(高),且在小车边沿设置至少3个吊耳,整车可被天车快速吊装更换,最大承重量为1.3t。
42.为防止上料小车自动运行期间失控或无线网桥通信失败,严重时可能造成生产事故,本实施例中还加入了无线遥控模块。工人可通过遥控器直接向上料小车发送具体指令,使得餐厨湿料的上料过程运行更加平稳和安全。
43.在本实施例中,选用西门子1200系列plc作为控制模块,具体为cpu1215芯片。为了增加数据接口的数量,为cpu1215芯片匹配了两颗sm1231和一颗sm1234和一颗sm1224芯片作为扩展。因此,本实施例中,cpu1215、两颗sm1231、sm1234和sm1224共同构成了控制模块。在第一颗sm1231芯片上,连接有行走编码器和倾翻编码器,两个编码器为格雷码绝对值编码器,编码方式为在第二颗sm1231芯片上,连接有无线遥控器、称重传感器和漫反射探测器。所述无线网桥通过以太网接口与cpu1215连接,用于向车载系统传递指令和状态信息。
44.在本实施例中,安装有两台v20电机变频器,分别与行走机构和倾翻机构的驱动电机相连,用于分别控制上料小车的行走与倾翻。行走电机变频器和倾翻电机变频器均通过rs485/232接口与cpu1215芯片相连,从而实现行走控制功能和倾翻控制功能。
45.在本实施例中,在轨道两端的极限位置处,安装有超限标记;在高架料仓下方的接料位安装有接料位标记。前述漫反射探测器能够在上料小车运行过程中,能够探测上料小车前方障碍物并自动停车,待障碍消除后继续运行。当漫反射探测器探测到小车位于轨道极限位置时,会自动停止运行并发出故障提示指令,停止上料小车行走并进行声光报警,故障排除后继续自动运行。当漫反射探测器探测到小车位于接料位时,能够自动对行走编码器进行校正,在每次上料过程中对行走机构进行校正,避免了误差积累。
46.在本实施例中,当处理流程启动后,餐厨垃圾生化处理机首先发出装料信号,装料信号通过无线网桥传输给cpu1215。cpu1215向行走机构发出指令,控制上料小车向接料位行走。当上料小车的漫反射探测器识别到接料位标记后,对行走编码器进行校正。同时,称重传感器实时向车载系统发送车重信息。在餐厨垃圾处理工艺系统中,按照下述公式计算本次上料重量:
47.下料量=设定量
‑
溜量
‑
提前量
48.提前量=最终装料量
‑
装料停止量
49.本次加料量=本次设定量
‑
上次偏差量
50.其中,下料量为出料设备停止进料时的湿料重量;溜量为出料设备停止后增加的重量;提前量为出料设备按设定值停止的重量;本次设定量为本次上料过程中上料小车需要装载的重量;上次偏差量为上料小车上次上料需要装载的重量与设定值的差值。
51.当上料小车称重传感器探测到的湿料重量达到下料量时,cpu1215通过无线网桥向上位机上报装料完成信息,控制高架料仓停止下料。同时,cpu1215把本次加料量存储在系统中。
52.cpu1215收到停止下料确认信号后,按照既定逻辑,使用rs485协议向行走电机变频器发出行走指令,驱动上料小车向预定的上料位行走,同时,行走编码器开始计数编码,通过sm1231不断向cpu1215发送行走位置和距离信息。当上料小车达到上料位后,cpu1215向行走机构发送停车指令,同时通过无线网桥等待上位机发出的倒料指令。
53.当cpu1215接受到通过无线网桥发来的倒料指令后,首先通过rs485协议向倾翻电机变频器发送指令,驱动上料小车货斗倾翻。同时,称重传感器实时监控上料小车中的湿料重量。当湿料重量达到本次加料量的1/3时,cpu1215发出抖动指令。所述抖动指令包括向行走电机变频器发送的往复运动指令和向倾翻电机变频器发送的往返抖动指令。
54.上述往复运动指令和往返抖动指令本质相同,均为控制驱动电机在短时内交换运转方向。为了保护驱动电机,避免电机变频器由于换向前电机能量没有释放而触发变频器报警,往复运动指令和往返抖动指令包含电机停止、释放反向能量、电机反向启动3个步骤。其中,电机停止和释放反向能量的时间间隔需要根据电机功率和上料小车中剩余湿料重量,通过cpu1215计算确定。
55.上料小车在往复运动指令和往返抖动指令驱动下,完成抖动后,cpu1215发出指令,控制货斗复位。
56.完成复位后,cpu1215驱动空载上料小车沿轨道行走,回复至接料位。为防止上料小车在运行中打滑导致的行走编码器信息不准确,当上料小车再次行走至接料位并停止时,自动触发行走编码器校正功能。同时,cpu1215在内置计数器内中把上料次数加1,完成本次上料流程。当内置计数器达到预定数值时,cpu向上位机发出自动清洗请求,餐厨垃圾处理工艺系统按照预定步骤启闭喷水喷头,对上料小车进行自动清洗。本实施例中,自动清洗预定数值为10。
57.当餐厨垃圾生化处理机需要再次加装餐厨湿料时,餐厨垃圾处理工艺系统向上料小车车载系统重新发出上料信号,再次启动上料过程。cpu1215中所有重量相关变量自动压入fifo堆栈,作为上一次上料信息备用。
58.以上对本实用新型所提供的基于图像深度识别的被困人员救援辅助系统进行了详细介绍,本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型技术方案的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1