一种可爬升无人搬运车的制作方法
1.本实用新型涉及一种物流运输设备,具体的说是一种可爬升无人搬运车。
背景技术:
2.近年来,随着互联网、电子商务的迅猛发展,消费者需求逐渐转变,企业订单处理呈现出“多品种、小批量、多批次、高时效”的特点,因此对仓储系统的智能化、柔性化提出更高要求。智能无人搬运车已逐步加大在智能仓储中的应用,从而提高物流分拣以及流转效率。
3.目前通常使用高货架来摆放更多数量的货物,从而提升仓库单位面积的使用率(库容率)。基于高货架的智能仓储解决方案也已经成为人们研究的热点
4.现有技术中,在货架的通道两层对应位置设置有爬升轨道,且爬升轨道垂直于水平面。智能无人搬运车通过顶出和爬升机构3与轨道对接爬升,从而实现在货架高度方向的移动,从货架中取放货物。无人搬运车通过行走机构在水平面进行移动,完成货物的运输。
5.然而,无人搬运机器人的搬运效率的提升对于到整个智能仓储系统是至关重要的。无人搬运车垂直爬升运动由于存在轨道对准、爬升等动作,也是整个搬运过程中最耗时的部分。现有技术方案在一次爬升过程中只能进行一次取货或者放货的操作,即使是垂直方向距离很近的两个货物,也必须要进行二次往返才可以完成搬运。
技术实现要素:
6.为解决上述技术问题,本实用新型提供一种可爬升无人搬运车,具体是通过以下技术方案实现的:
7.一种可爬升无人搬运车,包括车体1、行走轮2和爬升机构3,所述行走轮2设置在车体1底部,所述车体设置有至少两层置物架5,所述每层置物架5设置有伸缩式取货装置4。
8.进一步的,上述技术方案中,所述伸缩式取货装置4设置在置物架底部,分别向车体1两侧不同方向伸缩。
9.进一步的,上述技术方案中,所述伸缩式取货装置4可以是抓取货物机械臂或伸缩托盘。
10.进一步的,上述技术方案中,所述车体1为中空式框架结构,一层伸缩式取货装置4两侧面为车体1框架,二层伸缩式取货装置4两侧面为置物挡板。
11.本实用新型针对现有技术不足,提出了一种具有至少两层置物架5的可爬升无人搬运车,可以同时搬运两个或者多个货箱,提升了每次爬升搬运货物的数量,从而提升了作业效率。
附图说明
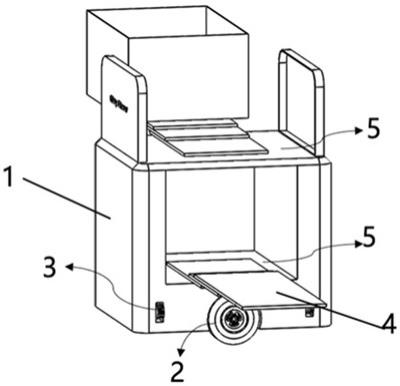
12.图1为本实用新型整体结构示意图;
13.图2为本实用新型工作示意图;
14.图3为本实用新型应用场景示意图。
具体实施方式
15.下面结合说明书附图对本实用新型做进一步详细说明。
16.如图1、图2所示,本实用新型一种可爬升无人搬运车,包括车体1、行走轮2和爬升机构3,所述行走轮2设置在车体1底部,所述车体1设置有至少两层置物架5,所述每层置物架5底部设置有伸缩式取货装置4。
17.如图3所示,货架间通道两侧对应位置部署有爬升轨道,所述无人搬运车设置有爬升机构3,通过爬升机构3和轨道的对接,实现机器人的爬升运动。
18.本实施方式车体1为中空式框架结构,一层置物架5伸缩式取货装置4两侧面为车体1框架,二层置物架5伸缩式取货装置4两侧面为置物挡板,伸缩式取货装置4分别向车体1两侧不同方向伸缩。本实施例中伸缩式取货装置4为三级伸缩式托盘,分别可以向两侧不同方向伸缩,搬运货物箱6后缩回置物架5,也可以采用机械手等抓取装置。
技术特征:
1.一种可爬升无人搬运车,包括车体、行走轮和爬升机构,所述行走轮设置在车体底部,其特征在于:所述车体设置有至少两层置物架(5),所述每层置物架设置有伸缩式取货装置。2.如权利要求1所述一种可爬升无人搬运车,其特征在于:所述伸缩式取货装置设置在置物架底部,分别向车体两侧不同方向伸缩。3.如权利要求2所述一种可爬升无人搬运车,其特征在于:所述伸缩式取货装置可以是抓取货物机械臂或伸缩托盘。4.如权利要求1所述一种可爬升无人搬运车,其特征在于:所述车体(1)为中空式框架结构,一层伸缩式取货装置两侧面为车体框架,二层伸缩式取货装置两侧面为置物挡板。
技术总结
本实用新型涉及一种物流运输设备,具体的说是一种可爬升无人搬运车,包括车体、行走轮和爬升机构,所述行走轮设置在车体底部,所述车体设置有至少两层置物架5,所述置每层物架底部设置有伸缩式取货装置。可以同时搬运两个或者多个货箱,提升了每次爬升搬运货物的数量,从而提升了作业效率。从而提升了作业效率。从而提升了作业效率。
技术研发人员:王式禹 贾小龙
受保护的技术使用者:北京边端科技有限公司
技术研发日:2020.12.09
技术公布日:2021/10/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1