一种垃圾回收箱投递门板自动升降机构的制作方法
1.本实用新型涉及环保领域,涉及垃圾回收箱,具体涉及一种垃圾回收箱投递门板自动升降机构。
背景技术:
2.当前市场上较为常见的垃圾回收箱的投放门主要是通过手动方式进行打开与关闭,使用十分不便;同时,打开与关闭垃圾箱的投放门时,使用时需要直接接触垃圾回收箱,容易导致垃圾回收箱上沾有的病原体附着到使用者身上,对使用者的健康造成很大的隐患;此外,部分使用者为了方便垃圾回收箱的使用,将垃圾投放门常开,容易导致垃圾箱内的垃圾以及垃圾的异味外溢至垃圾向外。
3.为了减少避免在投递垃圾时操作垃圾箱、防止垃圾和异味外溢,文献 cn108275396a公开了一种环保型智能垃圾箱,包括垃圾箱本体,所述垃圾箱本体内设有不可回收垃圾桶、可回收垃圾桶、隔板、挡板和蓄电池,所述垃圾箱本体前端面上开有第一垃圾投放口和第二垃圾投放口,所述挡板左端与升降机构连接,所述升降机构由机壳、电机座、伺服电机、联轴器、丝杆、轴承、螺母座共同构成,所述螺母座右端与所述挡板固定连接,所述挡板右侧设有滑杆,所述滑杆上设有与所述挡板固定连接的滑块,所述垃圾箱本体上方设有太阳能支架,所述太阳能支架上安装有太阳能电池板,所述垃圾箱本体前端面上设有控制面板、人体接近传感器、第一温度传感器和扬声器。其结构简单,实用性强。
4.但是,其使用丝杆和螺母座控制挡板的升降,丝杆和螺母的配合与转动容易受到垃圾箱内的异物影响,容易出现故障导致无法正常开闭,对垃圾箱附近环境和垃圾箱的使用造成不利影响。
5.文献cn103043348a公开了一种太阳能智能垃圾箱,包括箱体和用于装载垃圾的桶体,该桶体设于箱体内;本垃圾箱还包括太阳能控制装置、垃圾压缩装置、紫外灯消毒装置和智能投放口结构,太阳能控制装置设于箱体的顶部,垃圾压缩装置、紫外灯消毒装置智能投放口结构设于箱体内,并与太阳能控制装置连接,且垃圾压缩装置可上下运动进行垃圾压缩地设置在桶体的上方。其中,智能投放口结构包括有活动门和用于控制所述活动门自动打开/关闭的智能开关装置,所述活动门转动连接在所述箱体的投放口处,所述智能开关组件主要由投放信号采集单元、驱动器、拉绳和闭门器组成,所述投放信号采集单元和驱动器分别设于所述投放口处和箱体内,并均与所述太阳能控制装置导通连接,所述驱动器的转动部上设有摇臂,所述活动门的背面设有固定夹头,所述拉绳两端分别连接固定在所述摇臂和固定夹头上,并在所述驱动器的作用下拉动所述活动门转动打开,所述闭门器设于所述箱体内,并作用在所述活动门的背面,使其转动关闭。
6.但是,上述文献所记载的技术方案需要在垃圾箱内设置容纳活动门旋转的空间,容易导致垃圾箱内的空间浪费,减少容纳垃圾的空间,从而降低了垃圾箱的垃圾收集效果。
7.因此,需要提供一种空间需求较小且较为可靠的垃圾箱投递门板控制机构,在保证垃圾箱内空间充足利用的情况下仍具有较好的可靠性。
技术实现要素:
8.针对现有垃圾回收箱自动升降投递门板的可靠性低、占用空间大的问题,本实用新型提供了一种垃圾回收箱投递门板自动升降机构。
9.为了实现上述目的,本实用新型所采用的技术方案如下:一种垃圾回收箱投递门板自动升降机构,包括升降门框架、升降门板、导向轴、电机、同步带、同步带主动轮、同步带从动轮、滑块轴承座,其特征在于:所述升降门框架设置于垃圾回收箱,所述升降门板与垃圾回收箱的投递口相匹配,所述导向轴两端固定连接于所述升降门框架,所述导向轴为垂直布置且与升降门框架之间留有间隙,所述电机安装于所述升降门框架,所述同步带张紧于所述同步带主动轮与同步带从动轮上,所述电机的转轴与所述同步带主动轮连接,所述同步带从动轮的转轴与所述升降门框架转动连接,所述同步带从动轮与所述同步带主动轮分别靠近所述导向轴的两端,所述升降门板与所述滑块轴承座固定连接,所述滑块轴承座与所述导向轴滑动连接,所述升降门板固定连接于所述同步带。
10.优选地,所述电机为带刹车电机。
11.优选地,所述升降门板靠近所述同步带一侧与同步带压板固定连接,所述同步带压板与所述同步带固定连接。
12.优选地,所述升降门框架上设置有限位传感器,所述滑块轴承座上靠近升降门框架的位置设置有与所述限位传感器配合使用的限位遮挡板。
13.优选地,所述滑块轴承座为两个且平行对齐排列于所述升降门板上,所述限位遮挡板包括上限位遮挡板、下限位遮挡板,所述限位传感器包括上限位传感器、下限位传感器,所述上限位遮挡板位于上侧的所述滑块轴承座,所述下限位遮挡板位于下侧的所述滑块轴承座,所述上限位传感器位于上侧的所述滑块轴承座所能到达的最高安全位置,所述下限位传感器位于下侧的所述滑块轴承座所能到达的最低安全位置。
14.优选地,所述升降门框架上设置有导向轴架,所述导向轴的两端通过所述导向轴架与所述升降门框架固定连接。
15.优选地,所述升降门板还包括微动轴架、微动轴、缓冲门,所述缓冲门与升降门板相互平行,所述缓冲门的远离垃圾回收箱内侧的平面与所述升降门板靠近垃圾回收箱内侧的平面之间留有间隙,所述微动轴滑动连接于所述微动轴架且所述微动轴的顶端无法穿过所述微动轴架,所述微动轴架固定连接于所述滑块轴承座,所述微动轴固定连接于所述缓冲门。
16.优选地,所述微动轴座固定连接于所述缓冲门,所述微动轴座与所述微动轴固定连接。
17.优选地,所述滑块轴承座上设置有限位装置,所述限位装置与所述微动轴承座通过弹片连接。
18.优选地,所述微动轴架、微动轴、微动轴座、限位装置均为两个并分为两组,对称布置于所述滑块轴承座与所述缓冲门的两侧。
19.本实用新型具有以下有益效果:通过电机控制升降门板的开闭,从而实现垃圾回收箱投递门板的自动开闭,无需人工操作;同时结构简单,传动部分无需啮合,不易受到异物影响,可靠性较高;升降门板打开与关闭无需占用额外空间,升降机构主要占据垃圾箱投递门板附近的空间,对垃圾回收箱内的空间占用和影响较小;通过缓冲门和相应的结构,防
止升降门板在下落时夹住使用者的肢体,提高了安全性。
附图说明
20.图1为一种垃圾回收箱投递门板自动升降机构的正视图。
21.图2为一种垃圾回收箱投递门板自动升降机构的a
‑
a面截面图。
22.图3为一种垃圾回收箱投递门板自动升降机构的b
‑
b面截面图。
23.图4为一种垃圾回收箱投递门板自动升降机构的俯视图。
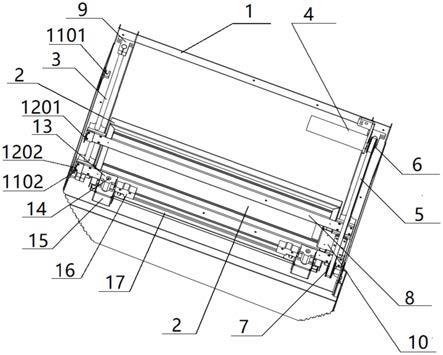
24.图5为一种垃圾回收箱投递门板自动升降机构的立体图。
25.图中:1为升降门框架,2为升降门板,3为导向轴,4为电机,5为同步带,6为同步带主动轮,7为同步带从动轮,8为滑块轴承座,9为导向轴架, 10为同步带压板,11为限位遮挡板,1101为上限位遮挡板,1102为下限位遮挡板,12为限位传感器,1201为上限位传感器,1202为下限位传感器,13为微动轴架,14为微动轴,15为微动轴套,16为限位装置,17为缓冲门。
具体实施方式
26.下面,结合附图具体实施方式,对本实用新型作进一步描述。
27.需要说明的是,在不相冲突的前提下,以下所描述的各个实施例之间或各个技术特征之间可以任意组合形成新的实施例。
28.如图1至图5所示,一种垃圾回收箱投递门板自动升降机构,包括升降门框架1、升降门板2、导向轴3、电机4、同步带5、同步带主动轮6、同步带从动轮7、滑块轴承座8,其特征在于:升降门框架1设置于垃圾回收箱,升降门板2与垃圾回收箱的投递口相匹配,导向轴3两端固定连接于升降门框架1,导向轴3为垂直布置且与升降门框架1之间留有间隙,电机4安装于升降门框架1,同步带5张紧于同步带主动轮6与同步带从动轮7上,电机4的转轴与同步带主动轮6连接,同步带从动轮7的转轴与升降门框架1转动连接,同步带从动轮7与同步带主动轮6分别靠近导向轴3的两端,升降门板2与滑块轴承座8固定连接,滑块轴承座8与导向轴3滑动连接,升降门板2固定连接于同步带5。
29.在升降门板2未升起时,升降门板2位于导向轴3的靠近底部的位置。在需要升降门板2升起时,通过电机4来驱动同步带主动轮6转动,带动同步带5 的移动,由于升降门板2与同步带5固定连接,因此通过电机4能够带动升降门板2移动;同时,升降门板2通过滑块轴承座8与导向轴3滑动连接,因此升降门板2将在导向轴2的轴向方向上移动。通过上述方法,能够通过电机4 来使升降门板2在垂直方向上被提起,从而升起升降门板2,打开垃圾回收箱。在将垃圾投入垃圾回收箱之后,电机4断电或向相反方向转动转轴,升降门板 2因自身重力或受电机4驱动逐渐下落直至关闭垃圾回收箱。通过上述方式,实现了垃圾回收箱投递门板的自动开闭,无需人工操作;同时结构简单,传动部分无需啮合,不易受到异物影响,可靠性较高;升降门板2打开与关闭无需占用额外空间,升降机构主要占据垃圾箱投递门板附近的空间,对垃圾回收箱内的空间占用和影响较小。
30.电机4为带刹车电机。通过电机4的刹车作用,能够使升降门板2随时停止,便于垃圾回收箱投递门板的自动控制。
31.如图1、图2所示,升降门板2靠近同步带5一侧与同步带压板10固定连接,同步带压
板10与同步带5固定连接。通过同步带压板10将同步带5与升降门板2传动连接,使同步带5的移动能够带动升降门板2的升降,同时便于拆装与调试。
32.如图3所示,升降门框架1上设置有限位传感器12,滑块轴承座8上靠近升降门框架1的位置设置有与限位传感器12配合使用的限位遮挡板11。由于滑块轴承座8与升降门板2固定连接,通过限位遮挡板11与限位传感器12判断升降门板2在升降门框架1上的位置,从而通过控制电机4来控制升降门板2 的移动与停止,从而防止升降门板2在极限位置时仍受到电机4带动而导致升降机构损坏。
33.如图3、图5所示,滑块轴承座8为两个且平行对齐排列于升降门板2上,限位遮挡板11包括上限位遮挡板1101、下限位遮挡板1102,限位传感器12包括上限位传感器1201、下限位传感器1202,上限位遮挡板1101位于上侧的滑块轴承座8,下限位遮挡板1102位于下侧的滑块轴承座8,上限位传感器1201 位于上侧的滑块轴承座所能到达的最高安全位置,下限位传感器1202位于下侧的滑块轴承座8所能到达的最低安全位置。通过上限位遮挡板1101、下限位遮挡板1102与相应的上限位传感器1201、下限位传感器1202来判断升降门板所到达位置,从而控制升降门板2移动,避免升降门板2的过度移动导致结构损坏。
34.如图1至图3所示,升降门框架1上设置有导向轴架9,导向轴3的两端通过导向轴架9与升降门框架1固定连接。通过导向轴架9进行导向轴3的安装于连接,便于导向轴3的拆装于维修。
35.如图1、图4、图5所示,升降门板2还包括微动轴架13、微动轴14、缓冲门17,缓冲门17与升降门板2相互平行,缓冲门17的远离垃圾回收箱内侧的平面与升降门板2靠近垃圾回收箱内侧的平面之间留有间隙,微动轴14滑动连接于微动轴架13且微动轴14的顶端无法穿过微动轴架13,微动轴架13固定连接于滑块轴承座8,微动轴14固定连接于缓冲门17。当升降门板2下降以关闭垃圾回收箱投递门板时,若有使用者未能及时将手抽出垃圾回收箱投递门板,在缓冲门17与使用者肢体接触时,因受到使用者肢体产生的作用力而使微动轴14与微动轴架13之间发生相对滑动,由于缓冲门17与升降门板2之间设置有间隙,缓冲门17能够向上移动部分距离,从而防止升降门板2受电机4的驱动或自身重力驱动而对使用者肢体产生过大压力,实现防夹手的功能。
36.如图1、图5所示,微动轴座15固定连接于缓冲门17,微动轴座15与微动轴14固定连接。通过使用微动轴座15来连接微动轴14,便于调整微动轴14 的位置,从而便于安装与调试。
37.如图1所示,滑块轴承座8上设置有限位装置16,限位装置16与微动轴承座15通过弹片连接。通过弹片的弹力作用,对滑块轴承座8与微动轴承座 15产生相反方向的力,使得升降门板2与缓冲门17在无外部压力时能够保持相对稳定的状态。
38.如图1、图5所示,微动轴架13、微动轴14、微动轴座15、限位装置16 均为两个并分为两组,对称布置于滑块轴承座8与缓冲门17的两侧。
39.以上技术特征构成了本实用新型的最佳实施例,其具有较强的适应性和最佳实施效果,可根据实际需要增减非必要技术特征,来满足不同情况的需要。
40.最后应当说明的是,以上内容仅用以说明本实用新型的技术方案,而非对本实用新型保护范围的限制,本领域的普通技术人员对本实用新型的技术方案进行的简单修改或者等同替换,均不脱离本实用新型技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1